一种面向蓝莓设施栽培的智能管理系统
- 国知局
- 2024-10-09 14:39:29
本发明设计一种面向蓝莓设施栽培的智能管理系统,属于大棚智能管理系统领域。
背景技术:
1、在蓝莓设施栽培行业,目前我国大多数的环境监测系统是通过布设各种传感器进行点对点监测,布线复杂,监测点与主控板之间连接过于繁琐,硬件成本偏高;同时,在高温高湿环境下多传感器的抗干扰能力差,导致传感器可靠性较低,系统故障率高,需要大量人力物力去维护,造成整个监测系统运营成本偏高。蓝莓植株在生长过程中,不同时期其植株高度不全相同,植株的茂盛程度也有差异。当需要监测高度不同的植株时,需要调节激光雷达和双目相机的高度;当遇到植株茂盛程度不同时,需要调节不同时,需要调节激光雷达和双目相机的俯仰角度。因此,现有技术的针对蓝莓监控系统存在智能化管理程度低、复杂度高的弊端,无法满足现代化农业的技术需求,限制了我国设施农业高水平发展。
2、针对上述问题,本发明设计一种面向蓝莓设施栽培的智能管理系统,用于无人化监测和维护蓝莓生长,以及大棚场景三维模型重建;提出一种自适应多向调节机构,可由支撑轴、转向球和底板实现安装底座的上下移动和周向转动。
技术实现思路
1、为解决上述技术问题,本发明的目的在于提供了一种面向蓝莓设施栽培的智能管理系统。该方案提出一种自适应多向调节机构,可根据植株种类和生长周期的不同,调节安装底座的高度和水平角度,实现对植株生长过程全周期的监测。
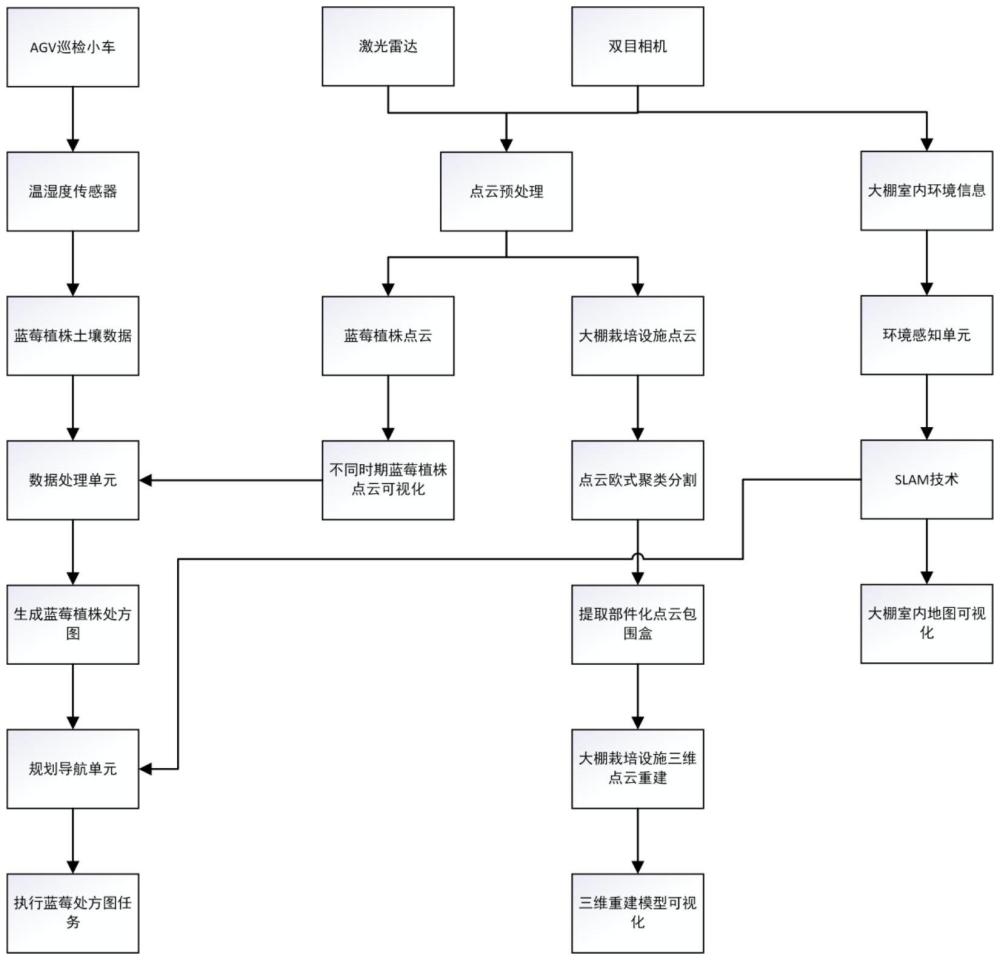
2、为了实现上述目的,本发明的技术方案如下:一种面向蓝莓设施栽培的智能管理系统,用于无人化监测和维护蓝莓生长,以及大棚场景三维模型重建,包括:巡检模块、数据处理模块、路径规划与导航模块和三维场景重建模块。
3、所述巡检模块,包括执行单元和传感器单元,执行单元包括agv小车和机械臂,传感器单元包括温湿度传感器、激光雷达和双目相机,所述巡检模块负责完成对蓝莓植物的巡检任务,获取蓝莓植株和环境的三维数据,采集到的数据通过无线网络传输至下述的数据处理模块和三维场景重建模块。
4、进一步地,为达到激光雷达和双目相机在大棚内扫描不同时期蓝莓植株生长情况的目的,所述巡检模块设计一种自适应多向调节机构,所述一种自适应多向调节机构,包括安装底座、支撑轴、转向球和底板。安装底座作为激光雷达和双目相机的安装载体,其与支撑轴通过螺栓连接。支撑轴由伸缩杆和驱动电机组成,驱动电机设于伸缩杆内部,伸缩杆在驱动电机的指令下可沿轴向伸长或缩短。转向球由钢球、若干滚珠和两条相互垂直的凹槽组成,凹槽焊接在钢球下半球表面处,若干滚珠安装在凹槽内部,使之可沿底板中的导轨移动。底板由钢板、导轨和驱动电机组成,钢板为一长方体板状结构,其上表面呈现往下凹半球形状,凹半球表面有两条相互垂直的导轨,导轨与上述凹槽相对应配合安装。两条导轨交汇处设有一驱动电机,根据指令可驱动转向球沿着导轨自由摆动。支撑轴与转向球螺栓连接,转向球与底板通过球面副连接。激光雷达和双目相机安装在自适应多向调节机构的安装底座上,调节机构固定安装在agv小车的车架上方。
5、所述数据处理模块,包括数据接发单元和数据处理单元。所述数据接发单元通过无线网络接收来自上述巡检模块获取的蓝莓盆栽土壤数据,通过所述数据处理单元将巡检agv小车采集的土壤数据进行养分分析,并智能化生成针对每个蓝莓植株的浇水和施肥处方图任务列表。
6、所述路径规划与导航模块,包括环境感知单元和规划导航单元。所述环境感知单元接收上述巡检模块中传感器获取得到的环境信息(包括植物位置、障碍物等),建立室内地图。所述规划导航单元利用内嵌的路径规划与导航算法,为每个巡检任务规划出最佳路径。
7、所述三维场景重建模块,包括交互可视化单元和点云处理单元。所述点云处理单元接收上述巡检模块获取的大棚室内场景和蓝莓植株的三维点云数据,所述交互可视化单元可显示不同时期获取的蓝莓植株的三维点云数据。所述点云处理单元利用本发明中的三维点云重建方法,基于欧式聚类分割(euclidean clustering segmentation)算法对大棚设施点云数据进行部件化分割,通过提取部件化点云的包围盒将大棚内的蓝莓植株、设施等不同点云区分开,根据客户个性化需求,在所述交互可视化单元显示重建的室内场景,以满足客户对大棚内部设施进行改造。
8、相对于现有技术,本发明的优点如下:
9、1.本发明中巡检模块,提出一种自适应多向调节机构,可根据植株种类和生长周期的不同,调节安装底座的高度和水平角度,实现对植株生长过程全周期的监测。
10、2.本发明的数据处理模块,通过所述数据处理单元将巡检agv小车采集的土壤数据进行养分分析,并智能化生成针对每个蓝莓植株的浇水和施肥处方图,实现对植株的智能化养分分析。
11、3.本发明的路径规划与导航模块,将环境感知单元实时获取的环境信息和数据处理单元生成的植株养分处方图任务进行信息融合,在规划路径时同时考虑环境信息和植株养分处方图的输入信息,对巡检路径进行实时的调整和优化,能够高效地完成巡检任务,节省时间和资源。
12、4.对比现有的工程软件建模,本发明提出的三维场景重建模块直接利用现有的激光雷达快速扫描获取大棚室内点云数据,省去了建模的过程,从而节省了时间和人力成本;点云数据保留了大棚环境的细微原始信息(形状、结构、纹理等),使得重建出的场景更加真实、精确。
13、5.现有的激光雷达场景重建技术中,大多数对场景进行扫描后直接三维建模,本发明的三维场景重建模块添加点云分割功能,通过对大棚设施点云数据部件化分割和个性化重建,可对部件化的点云进行位置和大小的重建,使得大棚场景重建方案灵活多变。
技术特征:1.一种面向蓝莓设施栽培的智能管理系统,其特征在于,所述管理系统用于无人化监测和维护蓝莓生长,以及大棚场景三维模型重建,所述智能管理系统包括:巡检模块、数据处理模块、路径规划与导航模块和三维场景重建模块,
2.根据权利要求1所述的一种面向蓝莓设施栽培的智能管理系统,其特征在于,巡检模块中,当向巡检模块下达巡检指令后,执行单元中的agv小车被派往大棚内执行巡检任务,小车搭载的传感器单元开始工作,温湿度传感器随着机械臂开始逐一采集蓝莓盆栽土壤数据,同时,安装在agv小车的激光雷达和双目相机开始扫描大棚室内场景,获取蓝莓和环境的三维数据,完成对蓝莓植株盆栽土壤数据的采集后,通过无线网络传输至数据处理模块,同时,巡检模块搭载的激光雷达和双目相机扫描大棚室内场景,获取蓝莓和环境的三维数据,通过无线网络传输至三维场景重建模块,当要求激光雷达的扫描角度足够宽时,自适应多向调节机构中底板内部的驱动电机接收来自主机的控制指令后开始运行,从而驱动转向球通过球面副在底板凹半球内自由摆动,安装底座随之调整角度,使得激光雷达获取不同的扫描角度;当激光雷达获取蓝莓植株的三维形态信息,需要调整激光雷达的扫描高度范围时,支撑轴内部的驱动电机接收来自主机的控制指令后开始运行,从而驱动伸缩杆上下伸缩,伸缩杆带动安装底座上下运动,使得激光雷达实现对不同时期蓝莓植株高度和茂盛程度的扫描目的。
3.根据权利要求1所述的一种面向蓝莓设施栽培的智能管理系统,其特征在于,路径规划与导航模块中,当主机将生成的巡检任务列表传输至规划导航单元,环境感知单元根据激光雷达获取的环境信息,包括蓝莓植株位置、障碍物等,建立室内地图,规划导航单元利用路径规划与导航算法,为每个任务规划出最佳路径,考虑到路径的长度、避障因素,确保agv小车和机械臂能够顺利到达目标植株位置,完成对蓝莓植株施加水、药、肥料处方图任务。
4.根据权利要求1所述的一种面向蓝莓设施栽培的智能管理系统,其特征在于,三维场景重建模块中,巡检agv小车在执行任务的同时,持续使用激光雷达和双目相机扫描室内场景,扫描获取到的数据传输至三维场景重建模块的交互可视化单元,交互可视化单元利用场景重建算法对三维点云数据进行处理和分析,通过比较不同时间点获取的蓝莓植物的三维点云数据,观察到蓝莓在生长过程中的变化,包括高度、体积和形态的变化,同时,不同时期蓝莓的三维点云数据同步传输至数据处理模块中的数据处理单元,用于分析植物的生长速率、健康状况和生长模式,以及评估植物对不同环境条件的适应能力,点云处理单元利用欧式聚类分割(euclidean clustering segmentation)算法对大棚设施点云数据进行部件化分割,通过提取部件化点云的包围盒将大棚内的蓝莓植株、设施不同点云区分开,根据客户个性化需求,在交互可视化单元上展示重建的室内场景,使用户能够清晰地了解蓝莓的分布和大棚内部的结构,满足客户对大棚内部设施进行改造。
5.根据权利要求1所述的面向蓝莓设施栽培的智能管理系统,其特征在于,所述巡检模块设计一种自适应多向调节机构,所述自适应多向调节机构,包括安装底座、支撑轴、转向球和底板,安装底座作为激光雷达和双目相机的安装载体,其与支撑轴通过螺栓连接,支撑轴由伸缩杆和驱动电机组成,驱动电机设于伸缩杆内部,伸缩杆在驱动电机的指令下可沿轴向伸长或缩短,转向球由钢球、若干滚珠和两条相互垂直的凹槽组成,凹槽焊接在钢球下半球表面处,若干滚珠安装在凹槽内部,使之可沿底板中的导轨移动,底板由钢板、导轨和驱动电机组成,钢板为一长方体板状结构,其上表面呈现往下凹半球形状,凹半球表面有两条相互垂直的导轨,导轨与上述凹槽相对应配合安装,两条导轨交汇处设有一驱动电机,根据指令可驱动转向球沿着导轨自由摆动,支撑轴与转向球螺栓连接,转向球与底板通过球面副连接,激光雷达和双目相机安装在自适应多向调节机构的安装底座上,调节机构固定安装在agv小车的车架上方。
技术总结本发明公开一种面向蓝莓设施栽培的智能管理系统,用于无人化监测和维护蓝莓生长,以及大棚场景三维模型重建,包括:巡检模块、数据处理模块、路径规划与导航模块和三维场景重建模块。巡检模块包括执行单元和传感器单元,负责巡检大棚内蓝莓和环境状态;数据处理模块包括数据接发单元和数据处理单元,负责分析采集到的数据并生成维护任务;路径规划与导航模块包括环境感知单元和规划导航单元,用于规划巡检AGV小车的最佳路径;三维场景重建模块包括交互可视化单元和点云处理单元,负责对室内场景进行三维模型的重建和分析。本发明提供了一种实现无人化巡检、监测蓝莓生长情况及设施栽培模型重建的智能管理系统。技术研发人员:吴斌,陈嘉宇,卢轶,姜迪,易扬,刘英,樊晨龙,孙科正,姚效才,王梓受保护的技术使用者:南京林业大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/305992.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表