船舶三维位置、姿态变化和断缆风险的监测系统及方法与流程
- 国知局
- 2024-10-09 15:18:09
本发明属于港口安全管理以及船舶停泊监控的,具体而言,涉及一种船舶三维位置、姿态变化和断缆风险的监测系统及方法,主要应用于监测大型船舶在港口停泊期间的三维位置和姿态变化、以及缆绳断裂风险的预警。
背景技术:
1、在港口行业中,大型船舶的停泊安全是安全生产的关键环节。相较于中小型船舶,大型船舶在港口作业时面临一系列特殊的挑战和风险。
2、(1)潮汐与货物装卸影响:大型船舶因潮汐作用和货物装卸,在港期间的上下浮动距离较大,普遍在5至10米范围内。这导致停泊初期张紧的缆绳可能在停泊过程中松动或断裂,增加船舶漂移离岸的风险。
3、(2)长时间停泊风险:大型船舶在港停泊时间较长,通常超过24小时,这可能导致船舶漂移现象长时间未被察觉,从而增加了安全风险。
4、(3)安全隐患:大型船舶在港期间的漂移可能引发多重安全风险,包括干扰其他船只的正常通航、反复撞击码头威胁结构安全、以及可能导致缆绳断裂和人员设备伤害。
5、鉴于上述风险,对大型船舶的停泊状况进行全自动连续监测变得尤为必要。然而,现有技术在监测大型船舶三维位置和姿态方面存在明显不足:
6、①监测装置的局限性:现有监测技术多依赖于船上安装的主动测量装置,如gps定位系统、imu等,这些装置通常无法将数据实时、准确地传输给港口管理单位,形成信息孤岛。
7、②监测精度不足:高精度监测装置的装船率低,且gps定位精度难以达到厘米级别,不足以监测缆绳张力的微小变化,限制了对停泊状态船舶的有效管理。
8、③接触式监测装置的缺陷:少数港口单位使用的接触式监测装置,如磁铁与拉绳相连的系统,存在设备损坏风险,且精度低,无法准确报告船舶的详细位置和姿态。
9、④普通激光测距装置的缺陷:室外环境中的阳光和杂散光会干扰测量信号,导致精度下降。此外,大多数货船的黑色或深色船壳对激光的反射率低,进一步减弱了测量信号强度,限制了其在船舶定位测量中的可靠性。
10、基于上述,现有技术在实时性、准确性和可靠性方面仍有待提升。特别是在大型船舶的停泊安全管理方面,迫切需要一种能够全自动连续监测船舶三维位置和姿态的解决方案,以提高港口的安全管理水平,减少潜在的安全风险。
技术实现思路
1、鉴于此,为了解决现有技术存在的上述问题,本发明的目的在于提供一种船舶三维位置、姿态变化和断缆风险的监测系统及方法以达到能够全自动连续监测船舶三维位置和姿态的目的,解决了现有技术中港口单位对在港大型船舶监测手段单一、精度不足、实时性差和无法全面评估停泊状态的问题。
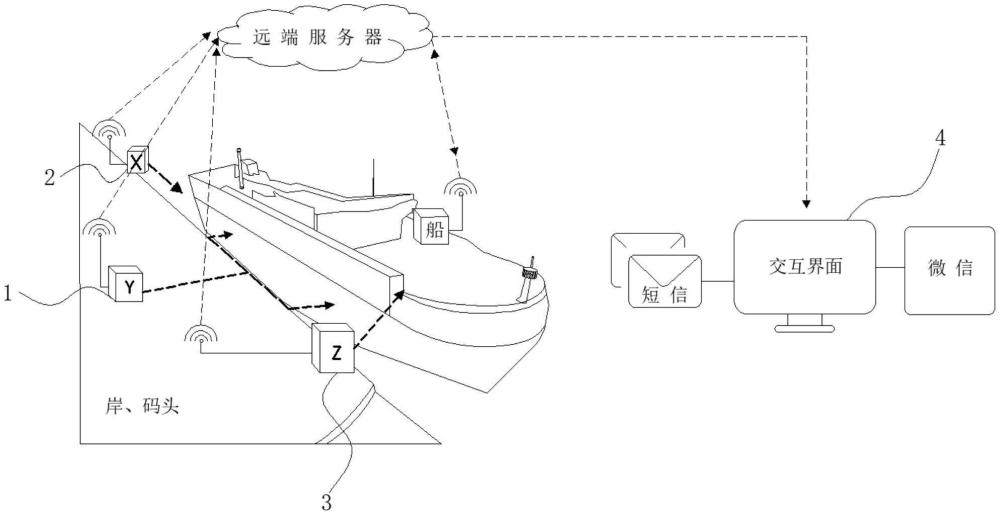
2、本发明所采用的技术方案为:一种船舶三维位置、姿态变化和断缆风险的监测系统,该监测系统包括:
3、纵向子系统,用以测量船体相对于码头岸线之间的漂移距离y;
4、横向子系统,用以测量船体沿码头岸线方向的漂移距离x;
5、竖向子系统,用以测量船体相对于水面的起伏高度z;
6、控制子系统,所述控制子系统分别与纵向子系统、横向子系统以及竖向子系统之间通信连接,且控制子系统与船体的集控室电脑端之间通信连接,集控室电脑端通过交互界面向监控人员发出报警;
7、其中,所述控制子系统为本地服务器或云端服务器。
8、进一步地,所述纵向子系统包括:
9、多个激光测距仪,各所述激光测距仪布置于码头泊位外沿且测量方向垂直于码头岸线方向;
10、边缘计算模块,所述边缘计算模块与各所述激光测距仪之间通信连接;
11、与边缘计算模块通信连接的第一通信模块,且第一通信模块与所述控制子系统之间通信连接;
12、其中,用岸基水平固定式激光测距仪,测量在港船舶船体与岸边的多点距离,进而计算出船体开档漂移的船岸y向距离、速度、加速度以及船体相对于岸线的偏转角度。
13、进一步地,所述横向子系统包括:
14、横向激光雷达,所述横向激光雷达布置于船舶泊位处船艏方向或船尾斜侧方向的码头岸线外沿上;
15、与横向激光雷达通信连接的第二通信模块,且第二通信模块与所述控制子系统之间通信连接;
16、其中,横向激光雷达用以获取船首或船尾的距离点阵云图,并通过数据处理系统分析船体沿码头边缘的漂移距离。
17、进一步地,所述竖向子系统包括:
18、竖向激光雷达,所述竖向激光雷达布置于船舶泊位处船舶货舱段对应的码头岸线上;
19、与竖向激光雷达通信连接的第三通信模块,且第三通信模块与所述控制子系统之间通信连接;
20、其中,在船体货舱段部署岸基大仰角单线程竖向激光雷达,监测船体高度的变化,以响应货物装卸和潮汐变化。
21、进一步地,在激光测距仪、横向激光雷达或竖向激光雷达的激光发射口增设线偏振玻璃片,且在激光测距仪、横向激光雷达或竖向激光雷达的激光接收口也增设线偏振玻璃片,并将角度旋转至与激光发射口的偏振玻璃片相同角度。基于此,本系统可在强环境光的干扰导致的背景噪声过大以及深色船壳对激光的高吸收导致的反射信号过低这两种不利条件下,通过对激光信号的收发进行偏振调制,对于黑色或其他深色船壳,采用偏振片调制技术,以提高监测信噪比,减少环境光干扰。
22、本发明还提供了一种船舶三维位置、姿态变化和断缆风险的监测方法,该监测方法包括:
23、s1:当船舶停泊到泊位后,由纵向子系统测量获知基础数据y,通过基础数据y分析判断船舶停泊到位后,转发到位信号至横向子系统和竖向子系统,并激活横向子系统和竖向子系统启动监测;
24、s2:由横向子系统和竖向子系统分别测量获知基础数据x和基础数据z后,通过对基础数据x、基础数据y和/或基础数据z的分析判断船舶当前的状态;
25、s3:监测并预警靠离泊安全风险、开档漂移风险以及高度变化引起的与港口作业机械碰撞的风险,当船舶的状态发生异常时,分析出船舶的具体异常状态和异常等级,并向监控人员发出报警;
26、其中,所述横向子系统、纵向子系统和竖向子系统内置有本地服务器或无线通信有云端服务器。
27、进一步地,所述纵向子系统测量的基础数据y包括:多个测量点处的船岸y向距离、船岸相对角度、船岸相对运动速度和船岸相对运动加速度;
28、通过各个测量点的船岸y向距离和船岸相对运动速度,判断当前船舶的停泊状态,若船舶完全停泊,则激活横向子系统和竖向子系统启动监测;若船舶未完全停泊,则停止。
29、进一步地,通过各测量点处的船岸相对运动速度和船岸相对运动加速度,基于动量定理和载重等级,计算各测点处缆绳的瞬间变化力;
30、由船岸相对角度、船岸相对运动速度和船岸相对运动加速度经过边缘计算出船岸y向距离的变化频率,通过船岸y向距离的变化频率计算缆绳振荡情况;
31、基于船岸y向距离、缆绳瞬间变化力和缆绳振荡情况,对船舶的开档漂移风险和缆绳断缆风险进行监测预警;
32、其中,采用边缘计算技术对各监测模块收集的数据进行初步计算,再将数据集中分析,实现对在港船舶状态的智能化控制和自动化报警。
33、进一步地,所述横向子系统测量的基础数x据包括:对船舶的船头或船尾进行二维面扫描以获取多个像素的x向距离信号;
34、对各像素的x向距离信号进行前后测量周期间的对比,通过点云配准、最高值比较以及均值比较算法,估算两个测量周期内船舶在x向的横移距离,当横移距离超过阈值,则发出报警。
35、进一步地,所述竖向子系统测量的基础数据z包括:对船舶的侧壁在z向方向上进行连续扫描所获取的测距信号和角度信号;
36、通过测距信号和角度信号,计算出当前光点的离岸距离;将离岸距离与船岸y向距离进行对比,判断当前光点是否落在船沿上,若是,则计算出船沿高度;若否,则当前光点无效;
37、通过对船沿高度实时追踪和记录,计算出船舶起伏的高度变化率,当高度变化率超过阈值,则发出报警。
38、进一步地,在s2中,还包括:
39、通过各测量点的船岸y向距离和由竖向子系统获知的船沿高度,计算出船舶的尺寸和载重等级。
40、本发明的有益效果为:
41、1.采用本发明所提供的船舶三维位置、姿态变化和断缆风险的监测系统,该监测系统由横向子系统、纵向子系统和竖向子系统等部分组成,能够对大型船舶停泊状态的三维位置和姿态的全自动连续监测,能够及时预警缆绳断裂风险、开档漂移风险以及与港口作业机械的碰撞风险,进而能提升整个港口区域的船舶安全风险联合预警能力。
42、2.采用本发明所提供的船舶三维位置、姿态变化和断缆风险的监测方法,其通过纵向子系统感知船舶停泊到位,同时,在横向子系统和竖向子系统的配合下,由于在三维方向上采用激光雷达,能实现对船舶的状态监测满足高精度和实时性,在船舶发生异常时,会及时发出报警,本方法通过智能化、自动化和信息化的技术手段,增强了港口管理单位对在港船舶的安全管理能力,从而有效提升了港口的运营效率和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308261.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。