一种帕金森患者用辅助行走装置
- 国知局
- 2024-10-09 15:24:04
本发明涉及医疗器械,具体涉及一种帕金森患者用辅助行走装置。
背景技术:
1、帕金森病是一种常见于中老年人的神经退行性疾病。帕金森病首发症状通常是一侧肢体的震颤或活动笨拙,进而累及对侧肢体。临床上表现为静止性震颤、运动迟缓、肌肉强直和姿势步态障碍。伴随着疾病的进展,在中晚期的帕金森病患者中常常出现冻结步态和姿势不稳。冻结步态主要表现为患者不能行走或行走时感觉自己的脚像“粘”在地板上或被地板吸住,不能抬脚,也不能挪步,身体由于惯性向前倾,迈步困难。患者在走路的起始阶段或者越过障碍物时,冻结步态会表现较明显,患者迈开步后,行走过程中,突然不可预期的步态中止,冻结步态和姿势不稳易导致跌倒和外伤。
2、为防止帕金森患者在行走时出现摔倒,在康复治疗过程中和平时生活中会使用行走辅助设备来防止患者摔倒,而手扶式行走辅助设备是最常用的行走辅助设备,如现有技术cn 115444720 a公开的一种用于帕金森病患者行走的辅助装置,包括底环、顶环和转环,所述底环的上表面固定连接有四个连接件,所述连接件的外侧通过转轴转动连接有活动支杆,所述活动支杆的外侧壁对称开设有两个竖槽,所述活动支杆的顶部开设有插口,所述顶环的底部固定连接有四个固定支管,所述固定支管为顶部和底部均开口的中空圆柱体结构。该方案通过设置的底环、顶环和转环,使得将患者置于底环、顶环和转环的内侧,通过手扶转环支撑患者,起到辅助行走的作用,该方案的手扶式的行走辅助设备能起到防止帕金森患者在行走时摔倒的作用,但手扶式的行走辅助设备需要患者行走时用手握持并推动该辅助设备跟随患者一起移动,在有斜度和凹凸不平的地面环境下,这种手扶式的行走辅助设备不能顺利移动,因此,现有的手扶式的行走辅助设备需要在地面平坦的环境下才能有效使用,且由于帕金森患者经常性发生手臂震颤,手扶式行走辅助设备对于帕金森患者来说无法有效握持和扶持住设备,因此,现有的手扶式行走辅助装置的使用范围小,使用不方便。
技术实现思路
1、本发明所要解决的技术问题是:提供一种帕金森患者用辅助行走装置,以解决上述背景技术中提出的现有技术中的行走辅助装置的使用范围小,不方便帕金森患者使用的问题。
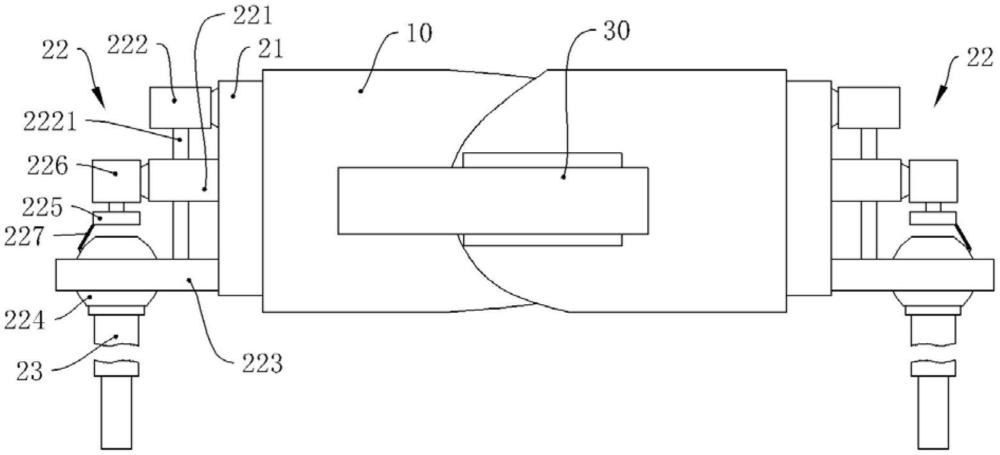
2、为解决上述技术问题,本发明采用的一个基础方案是:一种帕金森患者用辅助行走装置,包括束腰部、设置于所述束腰部上的支撑部和控制所述支撑部执行支撑动作的控制部;
3、所述束腰部包括腰带,所述腰带可拆卸地环绕束缚于患者腰部;
4、所述支撑部包括对称设置于患者两侧腰部的支撑单元,所述支撑单元包括设置于所述腰带上的固定座、设置于所述固定座上的角度调节机构和设置于所述角度调节机构上的伸缩杆,所述伸缩杆竖直设置,伸缩杆的上端与所述角度调节机构连接,伸缩杆的下端为自由端,所述角度调节机构用于调整所述伸缩杆的轴线方向;
5、所述控制部包括设置于所述腰带上的控制器和与所述控制器电连接的角度传感器,所述控制器与所述角度调节机构和所述伸缩杆电连接,控制器根据所述角度传感器的信号以控制所述角度调节机构调整所述伸缩杆的轴线方向和控制所述伸缩杆的伸缩。
6、上述基础方案中,当患者在行走中由于突然出现冻结步态和姿势不稳导致身体发生倾斜时,角度传感器判断患者身体倾斜角度的大小和倾斜方向,当角度传感器检测到患者身体的向某一方向倾斜的角度过大,控制器控制对应的角度调节机构运行使伸缩杆的轴线向患者倾倒方向向下倾斜并控制伸缩杆伸长直至伸缩杆的自由端接触地面,伸缩杆对患者起到支撑作用防止患者的身体进一步倾倒发生摔倒。由于本方案的辅助行走装置穿戴在患者身上,在患者正常行走时没有部件与地面接触,也无需手扶并推动装置移动,因此患者的行走不受地面环境条件的限制约束,使用范围广,使用方便。
7、进一步,所述角度调节机构包括与所述固定座滑动连接的移动块、设置于所述固定座上用于驱动所述移动块上下滑动的第一驱动件、与所述固定座固定连接的保持架、与所述保持架滑动连接的球状体、设置于所述球状体上方的转盘、设置于所述固定座上用于驱动所述转盘转动的第二驱动件和一端与所述转盘连接另一端与所述球状体连接的连接杆;
8、所述固定座上竖直设置竖向滑槽,所述移动块上设置有与所述竖向滑槽配合的滑块,在所述第一驱动件的驱动下所述移动块沿竖向滑槽上下滑动;
9、所述保持架水平设置,保持架上竖直设置安装通孔,所述安装通孔的内壁为球形面,所述球形面的球心点位于保持架上端面与保持架下端面之间的安装通孔的轴线上;
10、所述球状体位于所述安装通孔内与所述球形面滑动配合使得球状体可在所述安装通孔内自由转动;
11、所述转盘水平设置,转盘与所述安装通孔同轴设置;
12、所述连接杆的上端与所述转盘铰接,连接杆与转盘的铰接点与转盘的轴线偏心设置,连接杆的下端与所述球状体的上表面铰接,连接杆与球状体上表面的铰接点与所述安装通孔的轴线偏心设置,连接杆与球状体的铰接点到安装通孔轴线的距离大于连接杆与转盘的铰接点到安装通孔轴线的距离;
13、所述第一驱动件和所述第二驱动件均与所述控制器电连接。
14、上述方案中,根据角度传感器的信号,控制器分别控制电机一和电机二配合工作使得球状体在安装通孔内向不同的方向转动以使得伸缩杆的轴线指向患者倾倒方向的斜下方以有效支撑患者身体防止患者进一步倾倒摔倒。
15、进一步,所述保持架上的所述球形面的球心点位于所述保持架的水平中心平面与保持架轴线的交点上。
16、进一步,所述第一驱动件包括与所述固定座固定连接的电机一,所述电机一与所述控制器电连接,电机一的输出轴与所述竖向滑槽的轴线平行设置,电机一的输出轴上同轴固定连接有螺纹杆,所述移动块上设置有与所述螺纹杆配合的螺纹通孔。
17、进一步,所述第二驱动件包括电机二,所述电机二与所述控制器电连接,电机二与所述移动块固定连接,电机二的输出轴与所述转盘同轴固定连接。
18、进一步,所述球状体的底部设置有安装面,所述伸缩杆的上端于所述安装面处与所述球状体可拆卸连接使得所述伸缩杆的轴线经过所述球状体的球心点。
19、进一步,所述伸缩杆为电动伸缩杆。
20、进一步,所述腰带的两端通过魔术贴可拆卸连接,魔术贴的公贴端与腰带的一端固定连接,魔术贴的母贴端与腰带的另一端固定连接。
21、进一步,所述伸缩杆的自由端设置微动开关,所述微动开关与所述控制器电连接,当所述微动开关被按压触发时,所述控制器控制所述伸缩杆停止伸缩。
22、进一步,位于患者背部的腰带上设置有放置盒,所述放置盒内设置有向所述电机一、所述电机二、所述电动伸缩杆和所述控制器供电的可充电电池,所述控制器、所述角度传感器设置于所述放置盒内。
23、与现有技术相比,本方案的帕金森患者用辅助行走装置至少具有以下有益效果:
24、当患者在行走中由于突然出现冻结步态和姿势不稳导致身体发生倾斜时,控制器分别控制电机一和电机二配合工作使得球状体在保持架上向不同的方向转动以使得伸缩杆的轴线指向患者倾倒方向的斜下方并快速伸长接触地面对患者身体进行支撑以有效防止患者进一步倾倒摔倒。
25、由于本方案的辅助行走装置穿戴在患者身上,在患者正常行走时没有部件与地面接触,也无需手扶并推动装置移动,因此患者的手部可以自由活动且患者的行走不受地面环境条件的限制约束,使用范围广,使用方便。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308613.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表