一种夜间车辆避让方法及系统
- 国知局
- 2024-10-09 15:26:04
本发明涉及车辆识别,特别涉及一种夜间车辆避让方法及系统。
背景技术:
1、近年来,随着汽车保有量的逐年增长,交通安全问题日益严峻。在夜间环境中,光线不足,驾驶员的视线受到限制,难以清晰地看到远处或暗处的物体。由于能见度降低,驾驶员识别潜在危险并做出反应的时间可能会减少,增加了发生事故的风险,因此夜间行车安全成为社会广泛关注和研究的重点。
2、申请号为:cn202210892337.2的发明专利公开了车辆避让方法、装置、终端设备以及存储介质,其中,方法包括:获取待切入旁车与本车的相对行驶信息;判断所述相对行驶信息是否满足预设安全条件;若所述相对行驶信息满足预设安全条件,则控制本车执行安全舒适性避让模式;若不满足,则控制本车进行紧急刹车和/或绕行行驶。通过获取到待切入旁车与本车的相对行驶信息,并将相对行驶信息与预设安全条件进行比较,推测出旁车真切入的可能性大小,以及本车进行避让的时间是否充足,从而选择对应的避让模式,提高了对旁车切入状况预测的准确性,以避免过度响应导致牺牲舒适性,同时避免响应过缓导致安全隐患,进而在应对旁车切入过程中,在保障安全性的情况下提高了车辆的舒适性。
3、上述现有技术在夜间获取相对行驶信息(比如:车辆图像)时,存在信息获取不准确的情形(比如:街道照明可能不均匀,导致某些区域光线过暗或过亮,进而行驶信息获取不清楚),从而影响行驶信息是否满足预设安全条件的判断,进一步的,导致车辆避让不及时。
4、有鉴于此,亟需一种夜间车辆避让方法及系统,以至少解决上述不足。
技术实现思路
1、本发明目的之一在于提供了一种夜间车辆避让方法及系统,引入改进的ksc-yolov5模型识别夜间行车车辆,确定第一目标识别车辆,确定第一目标识别车辆之后,再进行周围的环境信息的获取,在此基础上确定最优车辆避让方案反馈给车机,提高了夜间行车车辆识别的准确性,进一步的,提高了车辆避让的及时性。
2、本发明实施例提供的一种夜间车辆避让方法,包括:
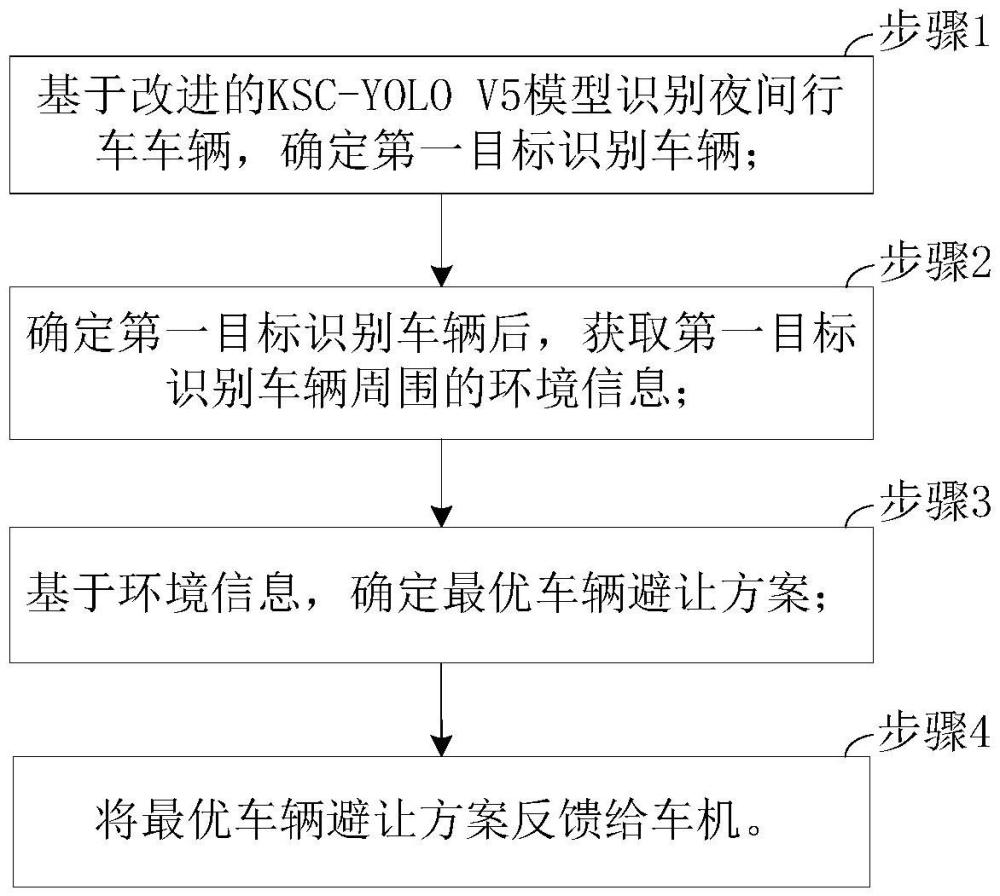
3、步骤1:基于改进的ksc-yolo v5模型识别夜间行车车辆,确定第一目标识别车辆;
4、步骤2:确定第一目标识别车辆后,获取第一目标识别车辆周围的环境信息;
5、步骤3:基于环境信息,确定最优车辆避让方案;
6、步骤4:将最优车辆避让方案反馈给车机。
7、优选的,步骤1:基于改进的ksc-yolo v5模型识别夜间行车车辆,确定第一目标识别车辆,包括:
8、构建改进的ksc-yolo v5模型;
9、将本地车辆的夜间识别图像输入改进的ksc-yolo v5模型,确定第一目标识别车辆;
10、其中,构建改进的ksc-yolo v5模型,包括:
11、基于选择性核网络sknets与yolo v5模型,确定模型框架;
12、基于轻量级carafe上采样模块、s iou回归距离损失计算方法和模型框架,确定改进的ksc-yolo v5模型。
13、优选的,步骤2:确定第一目标识别车辆后,获取第一目标识别车辆周围的环境信息,包括:
14、确定第一目标识别车辆后,基于预设于本地车辆的激光雷达,根据第一目标识别车辆,确定第一点云圈;
15、基于预设的扩大规则,获取第二点云圈;
16、根据第一点云圈和第二点云圈,确定环境信息;
17、其中,根据第一点云圈和第二点云圈,确定环境信息,包括:
18、根据第一点云圈和第二点云圈,确定目标圆环区域的激光扫描信息,并作为环境信息。
19、优选的,基于预设的扩大规则,获取第二点云圈,包括:
20、获取第一点云圈的第一半径;
21、获取本地车辆的最长车长;
22、在第一半径的基础上增加本地车辆的最长车长,获得第二半径;
23、以第一点云圈的第一圆心为第二点云圈的第二圆心;
24、根据第二圆心和第二半径,获取第二点云圈。
25、优选的,步骤3:基于环境信息,确定最优车辆避让方案,包括:
26、基于环境信息,判断目标圆环区域内是否存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆;
27、若目标圆环区域内不存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,确定第一避让方案;
28、若目标圆环区域内存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,确定第二避让方案;
29、将第一避让方案和第二避让方案共同作为最优车辆避让方案。
30、优选的,若目标圆环区域内不存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,确定第一避让方案,包括:
31、若目标圆环区域内不存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,将相应目标圆环区域对应的第一目标识别车辆作为第二目标识别车辆;
32、获取第二目标识别车辆和本地车辆的目标距离;
33、基于目标距离、本地车辆指向第二目标识别车辆的方向,建立向心方向向量;
34、获取本地车辆的第一车辆行驶向量;
35、获取第二目标识别车辆的第二车辆行驶向量;
36、确定第一避让方案时,控制第二目标识别车辆和本地车辆的目标距离为目标和值;目标和值为:第二目标识别车辆的半车身长与本地车辆的半车身长之和;
37、控制第一车辆行驶向量与向心方向向量垂直,且,控制第一车辆行驶向量与第二车辆行驶向量的向量夹角大于等于90°。
38、优选的,若目标圆环区域内存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,确定第二避让方案,包括:
39、若目标圆环区域内存在除了目标圆环区域对应的第一目标识别车辆之外其他的第一目标识别车辆,获取当前行驶车道的第一目标识别车辆的第一行驶特征;
40、根据第一行驶特征,对第一目标识别车辆进行行驶意图推测;
41、根据行驶意图推测的推测结果,在当前行驶车道的三维模型中规划第一目标识别车辆的未来行驶轨迹;
42、根据三维模型中的规划结果和本地车辆的第二行驶特征,进行本地车辆的未来碰撞模拟;
43、确定未来碰撞模拟中未发生碰撞的未来车辆避让方案,并作为第二避让方案。
44、优选的,步骤4:将最优车辆避让方案反馈给车机,包括:
45、将最优车辆避让方案反馈给车机,车机将最优车辆避让方案进行hud显示。
46、优选的,将最优车辆避让方案反馈给车机,车机将最优车辆避让方案进行hud显示,包括:
47、解析最优车辆避让方案,确定本地车辆的理想行驶轨迹;
48、获取本地车辆的实际行驶轨迹;
49、计算实际行驶轨迹和理性行驶轨迹的轨迹重合度;
50、若轨迹重合度小于1且大于等于轨迹重合度阈值,则基于ar技术,根据轨迹重合情况,确定hud显示的指示光标的光标特征;光标特征包括:光标指向和光标闪烁策略;
51、若轨迹重合度小于轨迹重合度阈值和/或测距雷达测得的障碍物距离小于等于预设的障碍物距离阈值,则重新规划最优车辆避让方案;
52、其中,基于ar技术,根据轨迹重合情况,确定hud显示的指示光标的光标特征,包括:
53、根据轨迹重合情况,确定轨迹偏离方向,基于预设的光标指向确定模版,根据轨迹偏离方向确定光标指向;
54、根据轨迹重合度和预设的光标闪烁策略确定库,确定光标闪烁策略。
55、本发明实施例提供的一种夜间车辆避让系统,包括:
56、目标识别车辆确定子系统,用于基于改进的ksc-yolo v5模型识别夜间行车车辆,确定第一目标识别车辆;
57、环境信息获取子系统,用于确定第一目标识别车辆后,获取第一目标识别车辆周围的环境信息;
58、最优车辆避让方案确定子系统,用于基于环境信息,确定最优车辆避让方案;
59、方案反馈子系统,用于将最优车辆避让方案反馈给车机。
60、本发明的有益效果为:
61、本发明引入改进的ksc-yolo v5模型识别夜间行车车辆,确定第一目标识别车辆,确定第一目标识别车辆之后,再进行周围的环境信息的获取,在此基础上确定最优车辆避让方案反馈给车机,提高了夜间行车车辆识别的准确性,进一步的,提高了车辆避让的及时性。
62、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过本技术文件中所特别指出的结构来实现和获得。
63、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。