电动转向控制方法、装置、车辆及存储介质与流程
- 国知局
- 2024-10-15 10:17:27
本发明涉及新能源汽车,具体涉及一种电动转向控制方法、装置、车辆及存储介质。
背景技术:
1、随着新能源汽车的高速发展,车辆零部件系统的电动化程度越来越高,除了驱动大电机系统以外,很多零部件实现了高压化,电动化。比如高压电动转向、电动空压机、高压转低压直流变换器、高压电动空调等。其中,电动助力转向成为新能源汽车转向系统的主流解决方案。
2、为保证行车安全及满足法规要求,车辆转向系统采用双源方案,即高压电动助力转向加低压应急转向助力。车辆通常情况下采用高压电动助力转向实现车辆转向助力,当高压电动转向系统因发生故障导致失效停机后,切入低压应急转向助力,保证司机行驶过程中能够安全靠边停车。现有的电动转向系统的控制策略中,当高压电动转向系统的驱动电压低于高压欠压阈值时,高压电动转向系统停止工作,低压应急转向系统启动提供应急转向助力,当高压电动转向系统的驱动电压恢复到高压欠压阈值时,切换回高压电动转向系统工作,这会导致转向系统在高压电动转向系统与低压应急转向系统之间频繁的来回切换,车辆无法从高压转向和低压应急转向获取转向助力,影响行车安全;若不进行切换,则会导致高压转向控制器的驱动电压过高,损坏高压转向控制器。
3、由此可见,现有技术中电动转向控制系统的控制策略中,当车辆异常掉高压时,存在高、低压控制系统来回频繁切换,影响行车安全,或不切换会高压电动转向系统,导致高压转向控制器的驱动电压过高,损坏高压转向控制器的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种电动转向控制方法、装置、车辆及存储介质,用以解决现有技术中电动转向控制系统的控制策略中,当车辆异常掉高压时,存在高、低压控制系统来回频繁切换,影响行车安全,或不切换会高压电动转向系统,导致高压转向控制器的驱动电压过高,损坏高压转向控制器的技术问题。
2、为了解决上述技术问题,一方面,本发明提供了一种电动转向控制方法,包括:
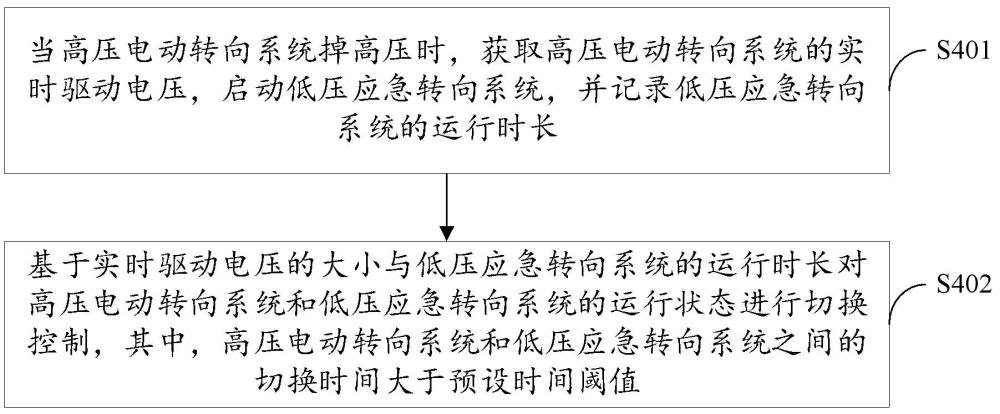
3、当高压电动转向系统掉高压时,获取所述高压电动转向系统的实时驱动电压,启动低压应急转向系统,并记录所述低压应急转向系统的运行时长;
4、基于所述实时驱动电压的大小与所述低压应急转向系统的运行时长对所述高压电动转向系统和所述低压应急转向系统的运行状态进行切换控制,其中,所述高压电动转向系统和所述低压应急转向系统之间的切换时间大于预设时间阈值。
5、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小与所述低压应急转向系统的运行时长控制所述高压电动转向系统和所述低压应急转向系统的运行状态,包括:
6、当所述运行时长小于或等于第一运行时长,判断所述实时驱动电压与高压欠压阈值的大小关系;
7、当所述实时驱动电压小于预设的高压欠压阈值时,维持所述低压应急转向系统继续运行,维持所述高压电动转向系统继续停机;
8、当所述实时驱动电压大于或等于所述预设的高压欠压阈值时,基于所述实时驱动电压的大小,控制所述高压电动转向系统和所述低压应急转向系统的运行状态。
9、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小,控制所述高压电动转向系统和所述低压应急转向系统的运行状态,包括:
10、当所述实时驱动电压在高压欠压恢复阈值和高压过压恢复阈值之间时,判断所述高压电动转向系统是否为异常掉高压;其中,所述高压欠压恢复阈值大于所述高压欠压阈值,所述高压欠压恢复阈值小于所述高压过压恢复阈值;
11、当所述高压电动转向系统为异常掉高压时,维持所述低压应急转向系统继续运行,维持所述高压电动转向系统继续停机;
12、当所述高压电动转向系统不为异常掉高压时,启动所述高压电动转向系统,停机所述低压应急转向系统。
13、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小,控制所述高压电动转向系统和所述低压应急转向系统的运行状态,包括:
14、当所述实时驱动电压在高压过压恢复阈值和高压过压阈值之间时,判断所述高压电动转向系统是否为异常掉高压;其中,所述高压过压阈值大于所述高压过压恢复阈值;
15、当所述高压电动转向系统不为异常掉高压时,启动所述高压电动转向系统,停机所述低压应急转向系统;
16、当所述高压电动转向系统为异常掉高压时,维持所述低压应急转向系统继续运行,维持所述高压电动转向系统继续停机,并开启电压消耗单元,以降低所述实时驱动电压。
17、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小,控制所述高压电动转向系统和所述低压应急转向系统的运行状态,包括:
18、当所述实时驱动电压大于高压过压阈值时,维持所述低压应急转向系统继续运行,维持所述高压电动转向系统继续停机,并开启电压消耗单元,以降低所述实时驱动电压。
19、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小与所述低压应急转向系统的运行时长控制所述高压电动转向系统和所述低压应急转向系统的运行状态,包括:
20、当所述运行时长大于第一运行时长时,停机所述低压应急转向系统,并判断所述实时驱动电压与高压欠压恢复阈值的大小关系;
21、当所述实时驱动电压大于或等于所述高压欠压恢复阈值时,启动所述高压电动转向系统;
22、当所述实时驱动电压小于所述高压欠压恢复阈值时,维持所述高压电动转向系统继续停机。
23、作为本发明一种可能的实施方式,在该实施方式中,所述基于所述实时驱动电压的大小与所述低压应急转向系统的运行时长控制所述高压电动转向系统和所述低压应急转向系统的运行状态之前,包括:
24、当不存在转向助力需求时,维持所述高压电动转向系统继续停机。
25、另一方面,本发明还提供了一种电动转向控制装置,包括:
26、信息获取模块,用于当高压电动转向系统掉高压时,获取所述高压电动转向系统的实时驱动电压,启动低压应急转向系统,并记录所述低压应急转向系统的运行时长;
27、控制模块,用于基于所述实时驱动电压的大小与所述低压应急转向系统的运行时长对所述高压电动转向系统和所述低压应急转向系统的运行状态进行切换控制,其中,所述高压电动转向系统和所述低压应急转向系统之间的切换时间大于预设时间阈值。
28、另一方面,本发明还提供了一种车辆,包括存储器和处理器,其中,
29、所述存储器,用于存储程序;
30、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任意实现方式中所述的电动转向控制方法中的步骤。
31、另一方面,本发明还提供了一种计算机可读存储介质,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时能够实现上述任意实现方式中所述的电动转向控制方法中的步骤。
32、本发明的有益效果是:本发明提供的电动转向控制方法,在车辆异常掉高压时,获取高压电动转向系统的实时驱动电压,启动低压应急转向系统,并记录低压应急转向系统的运行时长;基于实时驱动电压的大小与低压应急转向系统的运行时长控制高压电动转向系统和低压应急转向系统的运行状态,相较于现有技术,不是高压电动转向系统的驱动电压一达到欠压恢复阈值就切换,而是考虑了高压电动转向系统是否能够长时间维持运转、或者高压电动转向系统的电压是否对高压转向控制器存在安全隐患,进一步地,通过设置高压电动转向系统和低压应急转向系统之间的切换时间大于预设时间阈值,能够保证高压电动转向系统和低压应急转向系统之间不会频繁切换,且能够防止因高压转向控制器的驱动电压过高而损坏高压转向控制器。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317133.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表