一种多功能无人救援艇的制作方法
- 国知局
- 2024-10-15 10:13:25
本发明属于自动化设备,具体涉及一种多功能无人救援艇。
背景技术:
1、随着无人驾驶技术的快速发展,无人艇已经成为海上智能交通的重要研究领域。并且随着云计算、大数据在航运领域的逐步应用,构建智能化的无人救援艇已经成为可以实现的目标。海上无人救援艇具有救援速度快、成本低、精确度高等特点,并且在一些复杂海域进行救援时危险程度高,无人救援艇可以降低救援风险。随着我国对不同海域的开发程度不断提高,人们在海上的活动频率也逐渐提升。不论是渔民海上作业还是对于海上游玩的游客来说,突发状况是不可避免的,所以海上智能救援艇的研究必然是一项重大课题。
2、目前所采用的无人救援方式大多都是需要救援人员远程遥控救援艇抵达落水者附近水域,或者投掷救援设备至落水区域,落水者需要爬上救援装置来获救。这种传统的救援方式响应时间较慢,传统的一体船稳定性过低,在遇到恶劣天气的情况下很难定位到落水者的位置,对于复杂海域中的水下乱石等障碍物不能较好地通过,并且落水者的体力在长时间消耗下,传统的救援方式并不能保证救援的成功率。
3、因此,有必要设计一款多功能无人救援艇,以解决上述的技术问题。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种多功能无人救援艇以解决上述技术背景所提出的目前市场上传统的救援艇不仅响应时间慢,传统的一体船的稳定性太低,对于恶劣环境出现时不能及时地定位落水者位置,在出现水下乱石等复杂情况时不能及时通过,而且面对体力消耗过多的落水者不能够保证救援成功率的问题。
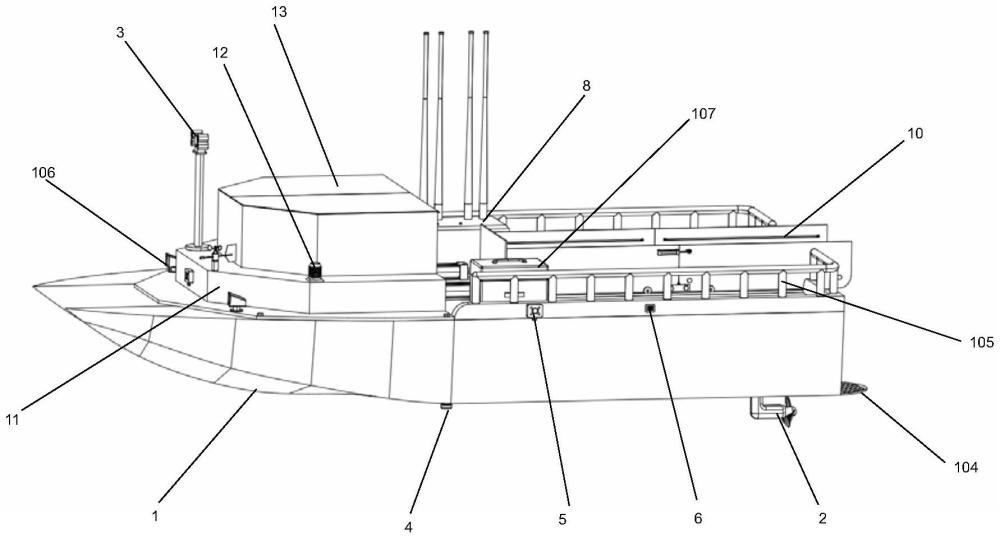
2、为实现上述目的,本发明提供如下技术方案:一种多功能无人救援艇,包括双船体、动力系统、信息采集系统、导航避障系统、全自动救生设备、电源系统和飞控装置,所述动力系统实现无人救援艇的运动,信息采集系统确定双船体周围的环境信息,所述导航避障系统实现确定落水人员位置、无人救援艇的自主避障和定位,所述全自动救生设备实现落水人员的救助,电源系统为动力系统、信息采集系统、导航避障系统、全自动救生设备供电;
3、所述动力系统为安装在双船体后端底部的电动螺旋桨,所述信息采集系统包括安装在双船体前端顶部的360°视觉侦查平台、安装双船体底部的声呐、安装在双船体四周的雷达和摄像头,360°视觉侦查平台和摄像头实现海面的视觉检测,雷达实现感知双船体周围的障碍物,声呐实现探测海底的情况,视觉检测信息、雷达信息、声呐信息传输到导航避障系统,所述导航避障系统实现落水人员的识别、双船体的避障和双船体的航线规划,飞控装置接收导航避障系统的双船体航线规划信息从而控制无人救援艇的前进方向。
4、所述导航避障系统包括安装在双船体上侧总控台上方的gps定位装置、安装在双船体上侧总控台内的飞控装置和板载计算机,gps定位装置采集双船体的位置信息;
5、双船体的位置信息、视觉检测信息、雷达信息和声呐信息传输到板载计算机,板载计算机通过全局路径a*算法得到双船体的初始航线,通过局部路径动态窗口算法躲避障碍物,得到双船体最优航线,通过yolov7视觉算法识别落水人员位置。
6、所述电源系统为设置在双船体上的电池盒,电池盒内设有锂电池,锂电池通过安装在总控台内的分电板为电动螺旋桨、360°视觉侦查平台、声呐、雷达、摄像头、gps定位装置供电。
7、所述双船体是由两个独立船体拼接而成,两独立船体前端通过铝板ⅰ连接,两独立船体后端通过铝板ⅱ连接形成甲板,铝板ⅱ与两独立船体后端为一体化设计,两独立船体内侧为垂直光滑面,两独立船体外侧的前端为弧形结构,后端为不规则箱体结构,船体后端的底部设有防护踏板。
8、所述全自动救生设备设置于双船体甲板上,全自动救生设备包括电动伸缩杆ⅰ、传送带、挡板、滑轮,所述电动伸缩杆ⅰ一端固定在铝板ⅱ上方,另一端连接挡板,挡板的内侧设有传动带,挡板底部通过滑轮滑动连接在铝板ⅱ上方的滑道上,挡板的内壁上设有灯带。
9、所述挡板设有前后两段,每段挡板内分别设有传动带,前后两段挡板的上端是由自动伸缩杆ⅱ连接,两段挡板底部通过连接钢板固定,连接钢板与挡板外侧转动连接。
10、所述360°视觉侦查平台安装在电池盒上方,电池盒上方还设有喊话器。
11、所述双船体的上方设有护栏,铝板ⅰ的两侧安装有探照灯,甲板上设有医疗急救箱。
12、所述一种多功能无人救援艇双船体的电池盒上方还设有无人机机舱,无人机机舱的尾部与电池盒尾部齐平,无人机机舱内装载无人机,无人机通过挂载的光学吊舱对落水人员水域进行视觉识别并向双船体的导航避障系统发送位置信号,双船体导航避障系统通过设置在总控台内的信号传输设备接受无人机发送的位置信号前往落水人员位置。
13、所述无人机机舱设有自动伸缩杆ⅲ实现箱盖的开合,自动伸缩杆ⅲ一端固定在无人机舱体内侧壁,另一端固定在舱盖上。
14、与现有技术相比,本发明的有益效果是:
15、1、该多功能无人救援艇采用双船体设计,保证了在海洋中航行和静止时的稳定性,同时双船体的设计具有甲板开阔的优点,使其可以携带更多的紧急救生设备,双船体甲板上还安装有护栏,船身采用了低阻力的流线型设计,动力装置选用了电动螺旋桨,这种设计更加地节能和环保,总控台装备的gps定位装置和飞控装置能够使救援艇精准地抵达目标区域,双船体前端装备有360°视觉侦查平台和摄像头,两者配合可以有效地进行障碍物的识别与定位,同时双船体四周和船底分别安装有雷达和声呐,在面对恶劣天气和水下复杂情况时保证救生艇安全有效地航行,这些装备可以确保在紧急情况下快速出击,在短时间内实施有效的救援,在无人救生艇接近落水者时,全自动救生设备会根据船身传感器的数据,通过电动伸缩杆来将传送带送至落水者面前,这极大地提升了救援的成功率。
16、2、本发明多功能无人救援艇可以协同无人机对指定海域进行侦查,一旦发现落水者,信息就会同步给救生艇,救生艇会规划最佳路线赶往事发现场,此同时空中的无人机通过信号传输设备给救生艇进行位置和视觉指引,再加上船上自带的传感器来精准地接近落水者。无人救生艇上装备有无人机机库,在执行完任务之后无人机将降落至该机库,机库对无人机进行位置修正并充电,这大大提升了救援的反应速度、精确性和成功率。
技术特征:1.一种多功能无人救援艇,其特征在于,包括双船体、动力系统、信息采集系统、导航避障系统、全自动救生设备、电源系统和飞控装置,所述动力系统实现无人救援艇的运动,信息采集系统确定双船体周围的环境信息,所述导航避障系统实现确定落水人员位置、无人救援艇的自主避障和定位,所述全自动救生设备实现落水人员的救助,电源系统为动力系统、信息采集系统、导航避障系统、全自动救生设备供电;
2.根据权利要求1所述的一种多功能无人救援艇,其特征在于,所述导航避障系统包括安装在双船体上侧总控台上方的gps定位装置、安装在双船体上侧总控台内的飞控装置和板载计算机,gps定位装置采集双船体的位置信息;
3.根据权利要求1所述的一种多功能无人救援艇,其特征在于,所述电源系统为设置在双船体上的电池盒,电池盒内设有锂电池,锂电池通过安装在总控台内的分电板为电动螺旋桨、360°视觉侦查平台、声呐、雷达、摄像头、gps定位装置供电。
4.根据权利要求1所述的一种多功能无人救援艇,其特征在于,所述双船体是由两个独立船体拼接而成,两独立船体前端通过铝板ⅰ连接,两独立船体后端通过铝板ⅱ连接形成甲板,铝板ⅱ与两独立船体后端为一体化设计,两独立船体内侧为垂直光滑面,两独立船体外侧的前端为弧形结构,后端为不规则箱体结构,船体后端的底部设有防护踏板。
5.根据权利要求1所述的一种多功能无人救援艇,其特征在于,所述全自动救生设备设置于双船体甲板上,全自动救生设备包括电动伸缩杆ⅰ、传送带、挡板、滑轮,所述电动伸缩杆ⅰ一端固定在铝板ⅱ上方,另一端连接挡板,挡板的内侧设有传动带,挡板底部通过滑轮滑动连接在铝板ⅱ上方的滑道上,挡板的内壁上设有灯带。
6.根据权利要求5所述的一种多功能无人救援艇,其特征在于,所述挡板设有前后两段,每段挡板内分别设有传动带,前后两段挡板的上端是由自动伸缩杆ⅱ连接,两段挡板底部通过连接钢板固定,连接钢板与挡板外侧转动连接。
7.根据权利要求3所述的一种多功能无人救援艇,其特征在于,所述360°视觉侦查平台安装在电池盒上方,电池盒上方还设有喊话器。
8.根据权利要求4所述的一种多功能无人救援艇,其特征在于,所述双船体的上方设有护栏,铝板ⅰ的两侧安装有探照灯,甲板上设有医疗急救箱。
9.根据权利要求3所述的一种多功能无人救援艇,其特征在于,所述双船体的电池盒上方还设有无人机机舱,无人机机舱的尾部与电池盒尾部齐平,无人机机舱内装载无人机,无人机通过挂载的光学吊舱对落水人员水域进行视觉识别并向双船体的导航避障系统发送位置信号,双船体导航避障系统通过设置在总控台内的信号传输设备接受无人机发送的位置信号前往落水人员位置。
10.根据权利要求9所述的一种多功能无人救援艇,其特征在于,所述无人机机舱设有自动伸缩杆ⅲ实现箱盖的开合,自动伸缩杆ⅲ一端固定在无人机舱体内侧壁,另一端固定在舱盖上。
技术总结本发明属于自动化设备技术领域,具体涉及一种多功能无人救援艇,包括双船体、动力系统、信息采集系统、导航避障系统、全自动救生设备、电源系统和飞控装置,所述动力系统实现无人救援艇的运动,信息采集系统确定双船体周围的环境信息,所述导航避障系统实现确定落水人员位置、无人救援艇的自主避障和定位,所述全自动救生设备实现落水人员的救助,电源系统为动力系统、信息采集系统、导航避障系统、全自动救生设备供电;本发明解决传统的救援艇响应时间慢,船体不稳定性问题,本发明对于恶劣环境时能及时地定位落水者位置,在出现水下乱石等复杂情况时及时顺利通过,而且面对体力消耗过多的落水者能够保证救援成功率。技术研发人员:王宝广,陈昌龙,姬书得,刘帅,宋崎,龚鹏,马琳,胡为,张春锋,王继东,郭泰盛受保护的技术使用者:青岛新动航空科技发展有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316852.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。