一种高精度防误报倾角加速度监测系统及方法与流程
- 国知局
- 2024-11-06 14:24:49
本发明涉及变形监测和卫星通信,具体为一种高精度防误报倾角加速度监测系统及方法。
背景技术:
1、地震、滑坡等灾害数量多、分布广、危害大,监测预警是主动防范地质灾害的重要手段,安装在偏远地区的倾角加速度监测设备,极大概率遇到地面固定通信网络、公用移动通信网络均未实现覆盖或现场通信设施已损坏的情况,导致无法传输数据。
2、基于倾角加速度传感器的变形监测技术测量过程简单,成本低廉且测量精度高,容易实现连续监测和自动化监测,能够提供局部的监测信息,使得变形监测技术逐渐向自动化、数字化转变,因此在变形监测领域应用广泛,一般倾角加速度监测设备采用倾角加速度传感器通过分析三轴倾角、加速度等判据的阈值触发预警来监测变形,监测过程中设备常常出现数据跳变情况,导致数据精度较差,误报率较高。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种高精度防误报倾角加速度监测系统及方法,具备解决特殊情况下的通讯问题,提高数据精度,有效降低误报率等优点,解决了上述问题。
3、(二)技术方案
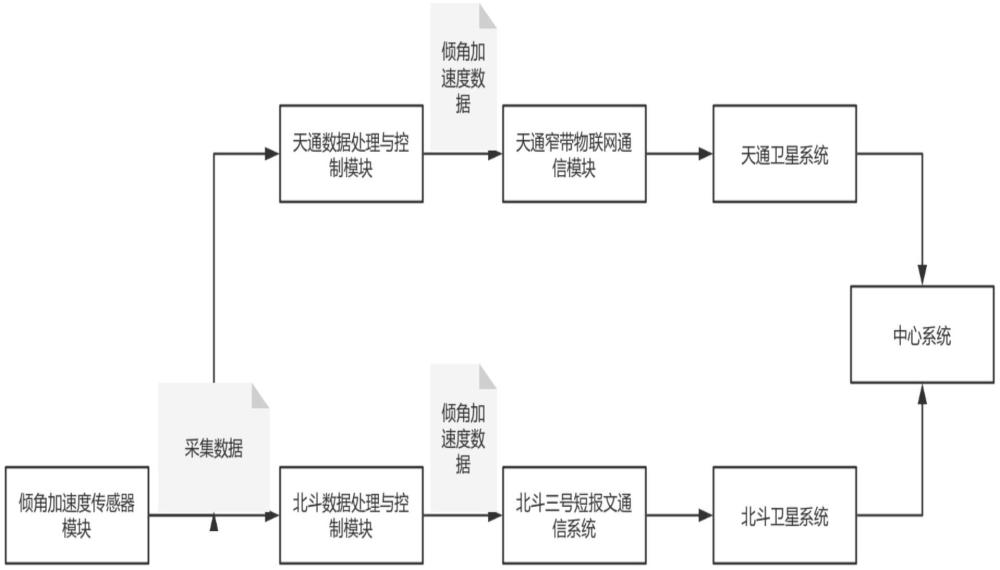
4、为实现上述目的,本发明提供如下技术方案:一种高精度防误报倾角加速度监测系统,包括倾角加速度监测设备、北斗卫星系统、天通卫星系统、中心系统;
5、所述倾角加速度监测设备分为5个模块,包括倾角加速度传感器模块、天通数据处理与控制模块、北斗数据处理与控制模块、北斗三号短报文通信模块以及天通窄带物联网通信模块;
6、所述倾角加速度传感器模块负责采集三轴倾角加速度数据szqj,所述天通数据处理与控制模块和北斗数据处理与控制模块负责数据滤波和误报检测,所述北斗三号短报文通信模块和天通窄带物联网通信模块数据负责数据上传,两个卫星系统用于实现倾角加速度监测设备和中心系统之间的通信;
7、所述倾角加速度传感器模块采集三轴倾角数据angle_x,angle_y,angle_z,采集三轴加速度数据acc_x,acc_y,acc_z,每种参数采集1000个数据;
8、所述倾角加速度监测设备基于倾角加速度传感器模块采集的数据,对采集数据进行高斯一维滤波,高斯一维滤波需要计算所有采集数据的平均值,计算方差,计算标准差,将每个数据与均值作差并取绝对值,将绝对值与标准差进行比较,若绝对值大于标准差,则删除该数据,最后将上一步中剩余的数据取平均值,作为最终采样值ang le_x,将上述6种参数的采样值与上次上报的参数数值进行相减,得到每个参数的变化量δt1,δt2,δt3,δt4,δt5,δt6,其中δt1表示三轴倾角angle_x变化量,δt2表示三轴倾角angle_y变化量,δt3表示三轴倾角angle_z变化量,δt4表示三轴加速度acc_x变化量,δt5表示三轴加速度acc_y变化量,δt6表示三轴加速度acc_z变化量;
9、所述倾角加速度监测设备内设置6个参数的报警阈值,包括δyz1,δyz2,δyz3,δyz4,δyz5,δyz6,将上述阈值与6个参数的变化量进行对应比较,进行误报检测;
10、当上述所有数据进行滤波和防误报操作后,由天通数据处理与控制模块、北斗数据处理与控制模块、北斗三号短报文通信模块以及天通窄带物联网通信模块对应进行数据打包发送。
11、优选的,所述倾角加速度传感器模块将采集的三轴倾角数据编入x数据集,x数据集合为{angle_x1,angle_x2,angle_x3,...,angle_x999,angle_x1000}。
12、优选的,所述倾角加速度传感器模块将采集的三轴加速度数据编入x1数据集,x1数据集合为{acc_x1,acc_x2,acc_x3,...,,acc_x1000}。
13、优选的,所述高斯一维滤波方法,以参数angle_x为例,对1000个数值计算平均值,得到angle_xmean,计算公式如
14、
15、公式中,angle_xmean表示三轴倾角数据的平均值,angle_x1表示x数据集合中的第1个三轴倾角数值,angle_x2表示x数据集合中的第2个三轴倾角数值,angle_x3表示x数据集合中的第3个三轴倾角数值,...,angle_x1000表示x数据集合中的第1000个三轴倾角数值。
16、优选的,所述高斯一维滤波方法,以参数angle_x为例,对1000个数值计算方差,得到计算公式如下:
17、
18、公式中,表示三轴倾角数据的方差,angle_x1表示x数据集合中的第1个三轴倾角数值,angle_x2表示x数据集合中的第2个三轴倾角数值,...,angle_x1000表示x数据集合中的第1000个三轴倾角数值,angle_xmean表示三轴倾角数据的平均值。
19、优选的,所述高斯一维滤波方法,以参数angle_x为例,对1000个数值计算标准差,得到angle_xs,计算公式如下:
20、
21、公式中,angle_xs表示三轴倾角数据的标准差,表示三轴倾角数据的方差。
22、优选的,所述高斯一维滤波方法,以参数angle_x为例,将1000个数值分别代入比较公式,删除不满足条件的数据,最终得到n个数据angle_xn1,angle_xn2,angle_xn3,...,angle_xnn,计算公式如下:
23、angle_xi--angle_xmean<=angle_xs
24、公式中,angle_xi表示从第i个数开始代入,i的取值在1-1000,angle_xmean表示三轴倾角数据的平均值,angle_xs表示三轴倾角数据的标准差。
25、优选的,所述最终采样值的计算公式如下:
26、
27、公式中,angle_x表示最终采样值,angle_xn1、angle_xn2、angle_xn3、...、angle_xnn表示满足权利要求7公式条件的数据,n表示数据的个数。
28、优选的,将所述6个变化量δt1,δt2,δt3,δt4,δt5,δt6与报警阈值δyz1,δyz2,δyz3,δyz4,δyz5,δyz6进行对应比较,比较方式如下:
29、当δt1<=δyz1且δt2<=δyz2且δt3<=δyz3且δt4<=δyz4且δt5<=δyz5且△t6<=δyz6时,若全部变化量都不超过报警阈值,则继续按原采集频率采集数据,只要有1个参数的变化量超过报警阈值,则进行误报检测。
30、优选的,一种高精度防误报倾角加速度监测方法,包括以下步骤:
31、步骤一、设置监测设备的采集频率为10hz,采集三轴倾角数据angle_x,angle__y,angle_z,采集三轴加速度数据acc_x,acc_y,acc_z,共计6种参数,每种参数每次采集1000个数据;
32、步骤二、对步骤1中所述的每种参数的1000个数据进行高斯一维滤波,高斯一维滤波过程如下:
33、a、所有数据取平均值;
34、b、计算方差;
35、c、计算标准差;
36、d、将每个数据与均值作差并取绝对值,将绝对值与标准差进行比较,若绝对值大于标准差,则删除该数据;
37、e、将上一步中剩余的数据取平均值,作为最终的采样值。
38、将angle_x,angle__y,angle_z、acc_x,acc_y,acc_z这6种参数按照上述a~e步骤,分别执行一次,得到6个采样值angle_x,angle_y,angle_z、acc_x,acc_y,acc_z。
39、步骤三、将这6种参数当前的采样值与上次上报的参数数值进行相减,得到每个参数的变化量;
40、步骤四、将这6个变化量与报警阈值(报警阈值可以根据需要调整)进行比较,若全部都不超过报警阈值,则继续按原采集频率采集数据只要有1个参数的变化量超过报警阈值,则进行误报检测。
41、与现有技术相比,本发明提供了一种高精度防误报倾角加速度监测系统及方法,具备以下有益效果:
42、本发明公开了一种高精度防误报倾角加速度监测系统及方法,采用北斗三号卫星短报文通讯、天通卫星窄带物联网通讯两种通讯方式相互配合,对采集的数据进行高斯滤波并添加防误报机制,能够解决特殊情况下的通讯问题,提高数据精度,有效降低误报率。
本文地址:https://www.jishuxx.com/zhuanli/20241106/321918.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。