搬运机器人
- 国知局
- 2024-11-06 14:34:24
本公开涉及自动化作业设备,具体地,涉及一种搬运机器人。
背景技术:
1、在现代工业与科研领域,精密仪器和液体制品的搬运对搬运设备的稳定性和操作精度有极高的要求。
2、然而,相关技术中的搬运机器人多采用机械臂结构,并且机械臂结构之间采用关节连接,在搬运过程中会产生较大的摆动或晃动,采用这种搬运机器人搬运精密仪器或液体这种物料,在物物料抓取和释放过程中,抓取及释放精度低,在物料转运过程中,只能降低行进速度以减小摆动幅度,因而影响了搬运机器人的搬运效率。
技术实现思路
1、本公开的目的是提供一种搬运机器人,该搬运机器人能够解决相关技术中搬运机器人物料抓取释放精度低,搬运效率低的技术问题。
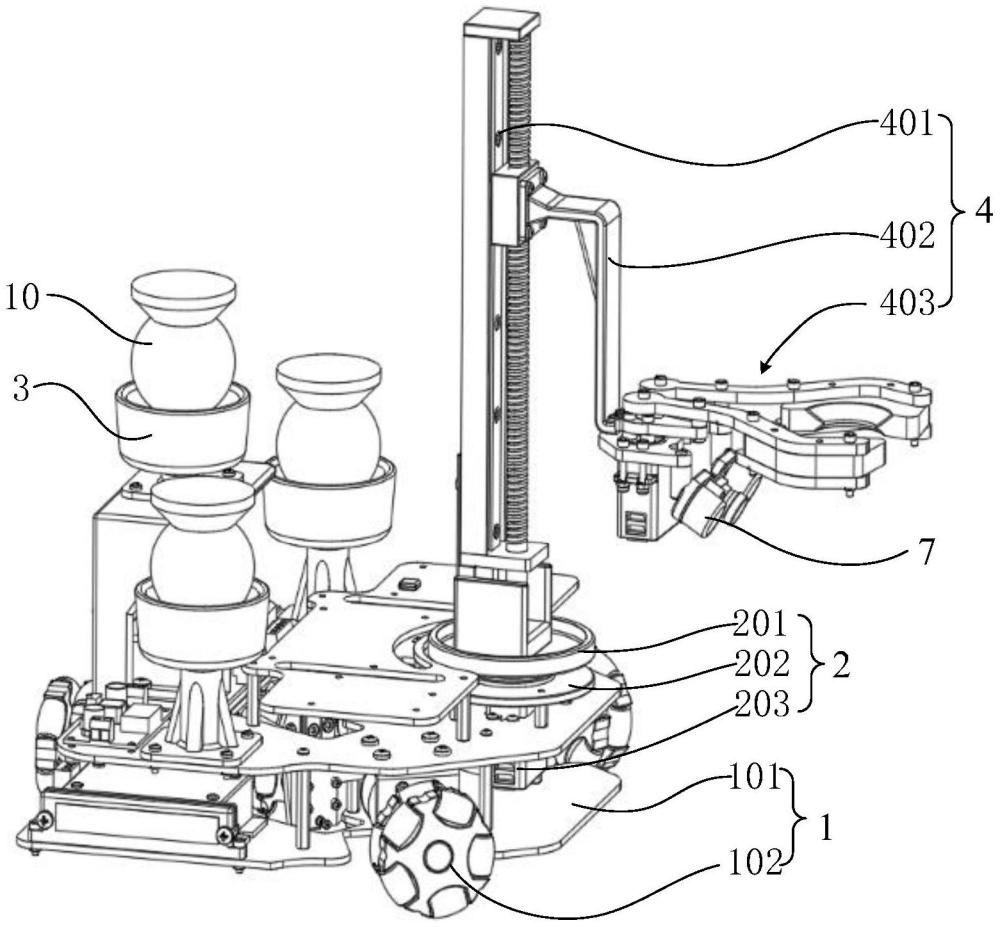
2、为了实现上述目的,本公开提供一种搬运机器人,包括:全向移动平台、旋转座、主载物台和升降机械手装置;所述全向移动平台包括底盘和多组行走轮组件;所述旋转座包括固定盘、旋转盘,以及用于驱动所述旋转盘旋转的第一舵机,所述固定盘固定连接在所述底盘的第一端;所述主载物台设置在所述底盘的第二端;所述升降机械手装置固定连接在所述旋转盘上,所述升降机械手装置用于从所述底盘的第一端附近抓取物料并将所述物料转移至所述主载物台,或,将所述物料从所述主载物台抓取并转移至所述底盘的第一端附近。
3、可选地,所述升降机械手装置包括升降丝杠、l形连接臂和机械抓夹;所述升降丝杠与所述旋转盘固定连接,所述l形连接臂的一端与所述升降丝杠的滑块连接,另一端连接所述机械夹爪。
4、可选地,所述机械抓夹包括固定板、第二舵机和两个抓指,所述固定板水平连接在所述l形连接臂的第二端,每个所述抓指的一端设置有齿轮,两个抓指的齿轮互相啮合,且可转动的连接在所述固定板上,其中一个抓指的齿轮与所述第二舵机的输出轴连接。
5、可选地,所述行走轮组件的数量为三组,三组所述行走轮组件呈等边三角形分布在所述底盘上;所述旋转座的中轴线和所述主载物台的中轴线位于三组所述行走轮组件构成的等边三角形任意一条中线所在的第一竖直平面内。
6、可选地,所述行走轮组件的数量为四组,四组所述行走轮组件呈矩形分布在所述底盘上;所述旋转座的中轴线和所述主载物台的中轴线位于四组所述行走轮组件构成的矩形任意一条中线所在的第二竖直平面内。
7、可选地,所述主载物台的数量为一个,一个所述主载物台位于所述底盘的第二端,或,所述主载物台的数量为多个,多个所述主载物台呈直线分布,且与所述旋转座处于第三竖直平面内。
8、可选地,还包括偶数个副载物台,偶数个所述副载物台位于所述底盘的第二端,且对称分布在所述主载物台的中轴线与所述旋转座的中轴线所确定的第四竖直平面的两侧。
9、可选地,所述底盘包括从下至上依次布置的下安装板和上安装板,所述下安装板和上安装板通过连接柱连接;所述行走轮组件与所述上安装板固定连接,所述固定盘与所述上安装板固定连接,所述主载物台与所述上安装板固定连接。
10、可选地,还包括主控板,以及固定连接在所述下安装板上的正交编码器;所述正交编码器与所述主控板电连接,每个所述行走轮组件与所述主控板电连接;所述正交编码器用于获取所述全向移动平台的运动信息,并将所述运动信息发送给所述主控板,所述主控板根据所述运动信息控制所述行走轮组件。
11、可选地,还包括摄像头,所述摄像头与所述主控板电连接;所述摄像头用于拍摄物料的信息码照片并将所述信息码照片发送给所述主控板,或,所述摄像头用于拍摄所述底盘周围的环境照片并将所述环境照片发送给所述主控板。
12、通过上述技术方案,本申请实施例提供一种搬运机器人,包括:全向移动平台、旋转座、主载物台和升降机械手装置。在物料抓取和释放过程中,由于采用了方向更灵活的全向移动平台,搬运机器人能够更靠近物料,通过升降机械手装置升降调节即可抓取物料,避免了相关技术中搬运机器人采用较多机械臂和关节导致的晃动和摆动,因而抓取和释放物料更加精准。在物料的转运过程中,又由于设置了专门用于承载物料的主载物台,物料能够被很好地固定,搬运机器人能够以较快的速度行进,因而提高了搬运机器人的搬运效率。
13、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:1.一种搬运机器人,其特征在于,包括:
2.根据权利要求1所述的搬运机器人,其特征在于,所述升降机械手装置(4)包括升降丝杠(401)、l形连接臂(402)和机械抓夹(403);
3.根据权利要求2所述的搬运机器人,其特征在于,所述机械抓夹(403)包括固定板(4031)、第二舵机(4032)和两个抓指(4033),所述固定板(4031)水平连接在所述l形连接臂(402)的第二端,每个所述抓指(4033)的一端设置有齿轮(4034),两个抓指(4033)的齿轮(4034)互相啮合,且可转动的连接在所述固定板(4031)上,其中一个抓指(4033)的齿轮(4034)与所述第二舵机(4032)的输出轴连接。
4.根据权利要求1所述的搬运机器人,其特征在于,所述行走轮组件(102)的数量为三组,三组所述行走轮组件(102)呈等边三角形分布在所述底盘(101)上;
5.根据权利要求1所述的搬运机器人,其特征在于,所述行走轮组件(102)的数量为四组,四组所述行走轮组件(102)呈矩形分布在所述底盘(101)上;所述旋转座(2)的中轴线和所述主载物台(3)的中轴线位于四组所述行走轮组件(102)构成的矩形任意一条中线所在的第二竖直平面内。
6.根据权利要求1所述的搬运机器人,其特征在于,所述主载物台(3)的数量为一个,一个所述主载物台(3)位于所述底盘(101)的第二端,
7.根据权利要求6所述的搬运机器人,其特征在于,还包括偶数个副载物台(5),偶数个所述副载物台(5)位于所述底盘(101)的第二端,且对称分布在所述主载物台(3)的中轴线与所述旋转座(2)的中轴线所确定的第四竖直平面(a2)的两侧。
8.根据权利要求1所述的搬运机器人,其特征在于,所述底盘(101)包括从下至上依次布置的下安装板(1011)和上安装板(1012),所述下安装板(1011)和上安装板(1012)通过连接柱连接;
9.根据权利要求8所述的搬运机器人,其特征在于,还包括主控板,以及固定连接在所述下安装板(1011)上的正交编码器(6);所述正交编码器(6)与所述主控板电连接,每个所述行走轮组件(102)与所述主控板电连接;所述正交编码器(6)用于获取所述全向移动平台(1)的运动信息,并将所述运动信息发送给所述主控板,所述主控板根据所述运动信息控制所述行走轮组件(102)。
10.根据权利要求9所述的搬运机器人,其特征在于,还包括摄像头(7),所述摄像头(7)与所述主控板电连接;所述摄像头(7)用于拍摄物料(10)的信息码照片并将所述信息码照片发送给所述主控板,或,所述摄像头(7)用于拍摄所述底盘(101)周围的环境照片并将所述环境照片发送给所述主控板。
技术总结本公开涉及一种搬运机器人包括:全向移动平台、旋转座、主载物台和升降机械手装置;所述全向移动平台包括底盘和多组行走轮组件;所述旋转座包括固定盘、旋转盘,以及用于驱动所述旋转盘旋转的第一舵机,所述固定盘固定连接在所述底盘的第一端;所述主载物台设置在所述底盘的第二端;所述升降机械手装置固定连接在所述旋转盘上。通过上述技术方案,搬运机器人能够更靠近物料,并通过升降机械手装置升降调节即可抓取物料,因而抓取更精准。在物料的转运过程中,物料能够被很好地固定,搬运机器人能够以较快的速度行进,因而提高了搬运机器人的搬运效率。技术研发人员:丁文俊,张雷,毛昭勇,宋保维,田文龙,闫争超,沈钧戈,李波,寇轩溢受保护的技术使用者:西北工业大学技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/322908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表