一种粮食简仓的清仓系统控制方法与流程
- 国知局
- 2024-11-06 15:04:03
本发明涉及智能清仓,具体为一种粮食简仓的清仓系统控制方法。
背景技术:
1、传统的粮食仓筒清仓方式多依赖于人工或简单的机械设备,存在着工作效率低、劳动强度大、安全风险高和粮食损失大等问题。其中人工清仓需要大量的人力资源,清仓效率低,导致整个清仓过程耗时较长,对应增加了时间成本,另外一方面,在机械设备清仓过程中,粮食容易受到挤压、碰撞等物理损伤,导致粮食品质下降。传统粮食仓筒清仓方式对不同物料的适应性较差,难以满足不同种类、不同状态的粮食清仓需求。
2、粮食仓筒的清仓技术也需要向智能化、自动化方向转型升级。需要进一步优化传统的粮食仓筒清仓技术,通过智能化控制,实现清仓作业的自动化和连续化,提高清仓效率,精准控制清仓过程,减少粮食在清仓过程中的物理损伤和浪费,保护粮食质量,进而为粮食仓储行业的可持续发展提供有力保障。
技术实现思路
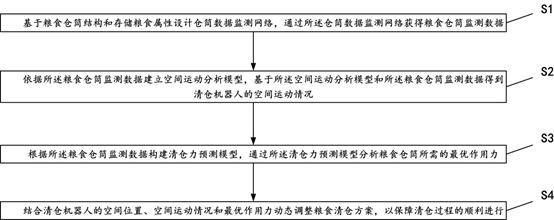
1、针对现有方法的不足以及实际应用的需求,为了优化传统粮食仓筒清仓技术,本发明的粮食仓筒智能清仓方法,通过物联网、人工智能等先进技术,实现了清仓作业的智能化和自动化升级。一方面本发明提供了一种粮食简仓的清仓系统控制方法,其包括如下步骤:基于粮食仓筒结构和存储粮食属性设计仓筒数据监测网络,通过所述仓筒数据监测网络获得粮食仓筒监测数据;依据所述粮食仓筒监测数据建立空间运动分析模型,基于所述空间运动分析模型和所述粮食仓筒监测数据得到清仓机器人的空间运动情况;根据所述粮食仓筒监测数据构建清仓力预测模型,通过所述清仓力预测模型分析粮食仓筒所需的最优作用力;结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案,以保障清仓过程的顺利进行。本发明基于粮食仓筒结构和存储粮食属性设计数据监测网络及动态调整清仓方案,可以提高清仓工作效率、减少粮食损失、提升作业安全性,同时为粮食仓储行业转型升级提供技术支持。
2、可选地,所述基于粮食仓筒结构和存储粮食属性设计仓筒数据监测网络,通过所述仓筒数据监测网络获得粮食仓筒监测数据包括:基于粮食仓筒结构和存储粮食属性设计仓筒数据监测网络,所述仓筒数据监测网络包括温湿度传感器、激光测距传感器、粉尘浓度传感器、无线摄像仪和烟雾报警器;通过所述仓筒数据监测网络监测仓筒中的粮食状态和环境参数,以获得粮食仓筒监测数据。本发明通过高精度传感器准确测量仓筒内的温度、湿度以及粮食的堆积高度等关键参数,为后续的粮食管理和清仓作业提供精确的数据支持。
3、可选地,所述依据所述粮食仓筒监测数据建立空间运动分析模型包括:引入三维分析技术,结合所述三维分析技术和所述粮食仓筒监测数据分析清仓机器人的重心位置;基于清仓机器人特征和所述重心位置建立空间运动分析模型。本发明将三维分析技术、传感器技术、机器人技术等多种技术融合到空间运动分析模型中,推动粮食仓储行业向智能化、自动化方向发展。
4、可选地,所述空间运动分析模型,满足如下关系;
5、
6、其中,表示清仓机器人的空间运动坐标系,表示清仓机器人重心矢量坐标系的x轴,表示清仓机器人重心矢量坐标系的y轴,表示清仓机器人重心矢量坐标系的z轴,表示清仓机器人x轴的旋转变换矩阵,表示清仓机器人y轴的旋转变换矩阵,表示清仓机器人z轴的旋转变换矩阵,表示齐次坐标系参数。本发明将清仓机器人的运动分解为三个轴的旋转和位移,并利用旋转变换矩阵实现机器人运动状态的精确分析,减少了机器人在运动过程中的误差和不确定性,提高清仓作业的准确度。
7、可选地,所述根据所述粮食仓筒监测数据构建清仓力预测模型包括:依据所述粮食仓筒监测数据建立机器牵引力分析函数;根据所述粮食仓筒监测数据构建清仓相互作用力预测函数;基于所述机器牵引力分析函数和所述清仓相互作用力预测函数构建清仓力预测模型。本发明利用粮食仓筒监测数据可以更准确地反映清仓过程中机器与粮食之间的相互作用关系,有助于构建出更加精确的清仓力预测模型,提高预测结果的可行性。
8、可选地,所述清仓相互作用力预测函数,满足如下关系;
9、
10、其中,表示清仓机器人与仓筒环境的相互作用力,表示仓筒环境刚度,表示清仓机器人x轴方向与仓筒环境的阻尼参数,表示清仓机器人x轴方向的末端位置,表示清仓机器人空间x轴的运动位置,表示清仓机器人y轴方向与仓筒环境的阻尼参数,表示清仓机器人y轴方向的末端位置,表示清仓机器人空间y轴的运动位置,表示清仓机器人z轴方向与仓筒环境的阻尼参数,表示清仓机器人z轴方向的末端位置,表示清仓机器人空间z轴的运动位置。本发明的清仓相互作用力预测函数综合考虑了多种因素来预测机器人与仓筒环境之间的相互作用力,为优化作业策略、提高作业效率、增强系统稳定性和促进智能化发展提供了有力支持。
11、可选地,所述清仓力预测模型,满足如下关系;
12、
13、其中,表示清仓机器人的最优作用力,表示仓筒环境刚度,表示清仓机器人的重心矢量坐标系,表示清仓机器人重心的期望坐标系,表示仓筒的惯性系数,表示清仓机器人的期望速度,表示清仓机器人的实际运动速度,表示清仓机器人的期望加速度,表示清仓机器人的实际运动加速度,表示清仓机器人与仓筒环境的相互作用力,表示牵引清仓机器人的最小作用力。本发明通过模型计算清仓机器人的最优作用力,可以确保机器人在作业过程中以最佳状态运行,有助于减少因作用力不当而导致的粮食损失、机械磨损和作业误差。
14、可选地,所述结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案包括:基于粮食仓筒结构和存储粮食属性预设粮食清仓时间,并将所述粮食清仓时间划分为多个时间区间。本发明将清仓时间划分为多个时间区间,可以更加精细地规划和管理清仓作业,有利于确保机器人在最佳状态下作业,提高清仓工作效率。
15、可选地,所述结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案包括:依据所述多个时间区间和粮食仓筒监测数据实时更新清仓机器人的空间位置、空间运动情况和最优作用力,以实现粮食清仓方案的动态调整。本发明实时更新清仓机器人的空间位置、空间运动情况和最优作用力,使得系统能够迅速响应仓筒内的环境变化,确保了清仓作业的灵活性和准确性,增强了系统的稳定性和智能化水平,为粮食仓储行业的可持续发展提供了有力支持。
16、第二方面,为能够高效地执行本发明所提供的一种粮食简仓的清仓系统控制方法,本发明还提供了一种粮食简仓的清仓系统,包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备和存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行本发明第一方面所述的粮食简仓的清仓系统控制方法,本发明的粮食简仓的清仓系统,结构紧凑、性能稳定,能够稳定地执行本发明提供的粮食简仓的清仓系统控制方法,提升本发明整体适用性和实际应用能力。
技术特征:1.一种粮食简仓的清仓系统控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的粮食简仓的清仓系统控制方法,其特征在于,所述基于粮食仓筒结构和存储粮食属性设计仓筒数据监测网络,通过所述仓筒数据监测网络获得粮食仓筒监测数据包括:
3.根据权利要求1所述的粮食简仓的清仓系统控制方法,其特征在于,所述依据所述粮食仓筒监测数据建立空间运动分析模型包括:
4.根据权利要求3所述的粮食简仓的清仓系统控制方法,其特征在于,所述空间运动分析模型,满足如下关系;
5.根据权利要求1所述的粮食简仓的清仓系统控制方法,其特征在于,所述根据所述粮食仓筒监测数据构建清仓力预测模型包括:
6.根据权利要求5所述的粮食简仓的清仓系统控制方法,其特征在于,所述清仓相互作用力预测函数,满足如下关系;
7.根据权利要求5所述的粮食简仓的清仓系统控制方法,其特征在于,所述清仓力预测模型,满足如下关系;
8.根据权利要求1所述的粮食简仓的清仓系统控制方法,其特征在于,所述结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案包括:
9.根据权利要求8所述的粮食简仓的清仓系统控制方法,其特征在于,所述结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案包括:
10.一种粮食简仓的清仓系统,其特征在于,系统包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备和存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行如权利要求1-9任一项所述的粮食简仓的清仓系统控制方法。
技术总结本发明涉及智能清仓技术领域,具体为一种粮食简仓的清仓系统控制方法,方法包括如下步骤:基于粮食仓筒结构和存储粮食属性设计仓筒数据监测网络,通过仓筒数据监测网络获得粮食仓筒监测数据;依据粮食仓筒监测数据建立空间运动分析模型,基于空间运动分析模型和粮食仓筒监测数据得到清仓机器人的空间运动情况;根据粮食仓筒监测数据构建清仓力预测模型,通过清仓力预测模型分析粮食仓筒所需的最优作用力;结合清仓机器人的空间位置、空间运动情况和最优作用力动态调整粮食清仓方案,以保障清仓过程的顺利进行。本发明基于仓筒结构、粮食属性以及机器运动情况动态调整清仓方案,可以提高工作效率、降低运营成本和促进技术进步。技术研发人员:申鹏,陈鹏,董瑞芝,高志愿,李瑞松,孙茂桐,孔明涵,陈皓,邓洪伟,董良太受保护的技术使用者:山东港口日照港集团有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/325150.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表