一种自动扶梯附加制动器棘轮监测分析预警方法与流程
- 国知局
- 2024-11-06 15:03:57
本发明涉及自动扶梯,尤其涉及一种自动扶梯附加制动器棘轮监测分析预警方法。
背景技术:
1、自动扶梯附加制动器是一种防止扶梯意外运转的保护装置,其安装在扶梯的传动系统上,它主要由制动轮、制动皮带、拉杆、弹簧等组成。随着自动化技术和智能监控需求的增加,基于新技术的自动扶梯附加制动器棘轮监测分析预警方法成为确保乘客安全和设备可靠性的关键手段,能够为提升自动扶梯运行安全性和维护效率带来了重要的创新和进步,通过安装在制动器棘轮及其驱动装置上的传感器,能够实时监测制动器棘轮的运行状态、位置和工作负荷,这些传感器能够精确检测棘轮的旋转速度、力度和位置,以及与棘轮相关的其他关键参数,如温度和振动情况,为制动器棘轮的健康状况提供实时、全面的数据支持。还通过将实时采集的数据传输至中央控制系统或云端平台,并利用数据分析和机器学习算法对棘轮的运行状态进行实时监测和分析,能够识别异常模式和趋势,预测棘轮出现的故障和维护需求,提前采取修复或更换措施,从而避免设备故障导致的潜在安全风险和停机时间。然而,传统的自动扶梯制动监测方法主要依赖于人工定期巡检附加制动器来监测制动器棘轮的状态,往往存在着监测不及时和准确度不高的问题。
技术实现思路
1、基于此,本发明有必要提供一种自动扶梯附加制动器棘轮监测分析预警方法,以解决至少一个上述技术问题。
2、为实现上述目的,一种自动扶梯附加制动器棘轮监测分析预警方法,包括以下步骤:
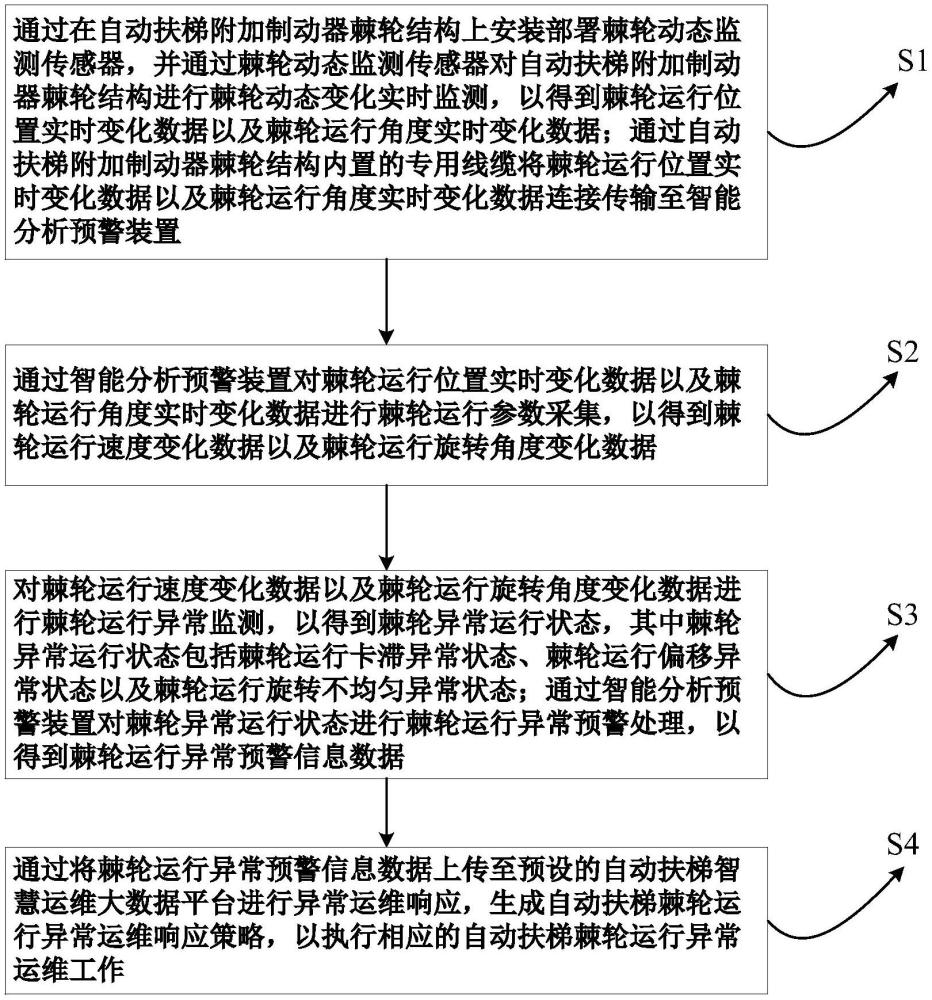
3、步骤s1:通过在自动扶梯附加制动器棘轮结构上安装部署棘轮动态监测传感器,并通过棘轮动态监测传感器对自动扶梯附加制动器棘轮结构进行棘轮动态变化实时监测,以得到棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据;通过自动扶梯附加制动器棘轮结构内置的专用线缆将棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据连接传输至智能分析预警装置;
4、步骤s2:通过智能分析预警装置对棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据进行棘轮运行参数采集,以得到棘轮运行速度变化数据以及棘轮运行旋转角度变化数据;
5、步骤s3:对棘轮运行速度变化数据以及棘轮运行旋转角度变化数据进行棘轮运行异常监测,以得到棘轮异常运行状态,其中棘轮异常运行状态包括棘轮运行卡滞异常状态、棘轮运行偏移异常状态以及棘轮运行旋转不均匀异常状态;通过智能分析预警装置对棘轮异常运行状态进行棘轮运行异常预警处理,以得到棘轮运行异常预警信息数据;
6、步骤s4:通过将棘轮运行异常预警信息数据上传至预设的自动扶梯智慧运维大数据平台进行异常运维响应,生成自动扶梯棘轮运行异常运维响应策略,以执行相应的自动扶梯棘轮运行异常运维工作。
7、进一步的,步骤s1包括以下步骤:
8、步骤s11:通过对自动扶梯附加制动器棘轮结构进行运行监测关键点分析,得到自动扶梯附加制动器棘轮运行监测关键点;
9、步骤s12:通过在自动扶梯附加制动器棘轮运行监测关键点上安装部署棘轮动态监测传感器,并通过棘轮动态监测传感器对自动扶梯附加制动器棘轮结构进行棘轮动态变化实时监测,以得到棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据;
10、步骤s13:通过自动扶梯附加制动器棘轮结构内置的专用线缆将棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据连接传输至智能分析预警装置。
11、进一步的,步骤s11包括以下步骤:
12、通过对自动扶梯附加制动器棘轮结构进行运行动态功能评估分析,得到自动扶梯附加制动器棘轮运行动态数据;
13、对自动扶梯附加制动器棘轮运行动态数据进行棘轮运行监测目标分析,得到自动扶梯附加制动器棘轮运行监测目标;
14、对自动扶梯附加制动器棘轮结构进行运行应力及传感器监测范围约束分析,以得到自动扶梯棘轮结构运行应力场约束条件以及自动扶梯棘轮结构传感器监测范围特定条件;
15、基于自动扶梯棘轮结构运行应力场约束条件以及自动扶梯棘轮结构传感器监测范围特定条件对自动扶梯附加制动器棘轮运行监测目标进行棘轮运行动态模拟分析,得到在不同运行监测工作条件下的自动扶梯棘轮结构动态运行数据;
16、根据在不同运行监测工作条件下的自动扶梯棘轮结构动态运行数据对自动扶梯附加制动器棘轮结构进行运行监测关键点分析,得到自动扶梯附加制动器棘轮运行监测关键点。
17、进一步的,步骤s2包括以下步骤:
18、步骤s21:通过智能分析预警装置对棘轮运行位置实时变化数据以及棘轮运行角度实时变化数据进行时序同步处理,得到棘轮运行位置时序同步变化数据以及棘轮运行角度时序同步变化数据;
19、步骤s22:对棘轮运行位置时序同步变化数据进行动态位移变化分析,得到棘轮运行动态位移时序变化数据;
20、步骤s23:对棘轮运行动态位移时序变化数据以及棘轮运行角度时序同步变化数据进行棘轮运行时间点位采集,以得到每一个运行时间点位处的棘轮运行动态位移数据以及棘轮运行角度数据;
21、步骤s24:对每一个运行时间点位处的棘轮运行动态位移数据进行棘轮运行速度分析,以得到棘轮运行速度变化数据;
22、步骤s25:对每一个运行时间点位处的棘轮运行角度数据进行棘轮运行旋转角度分析,以得到棘轮运行旋转角度变化数据。
23、进一步的,步骤s22包括以下步骤:
24、对棘轮运行位置时序同步变化数据进行位置变化幅度统计分析,得到棘轮运行位置变化分布幅值数据;
25、基于棘轮运行位置变化分布幅值数据对棘轮运行位置时序同步变化数据进行周期性时序窗口划分,以得到每一个运行周期性时序窗口内的棘轮运行位置变化数据;
26、对每一个运行周期性时序窗口内的棘轮运行位置变化数据进行位置变化频谱转换分析,得到每一个运行周期性时序窗口内的棘轮运行位置变化分布频谱;
27、对每一个运行周期性时序窗口内的棘轮运行位置变化分布频谱进行位置变化波动频率分析,得到每一个运行周期性时序窗口内的棘轮运行位置变化波动频率;基于每一个运行周期性时序窗口内的棘轮运行位置变化波动频率对每一个运行周期性时序窗口内的棘轮运行位置变化分布频谱进行位置变化周期量化计算,以得到每一个运行周期性时序窗口内的棘轮运行位置变化波动周期;
28、根据每一个运行周期性时序窗口内的棘轮运行位置变化波动频率以及棘轮运行位置变化波动周期对每一个运行周期性时序窗口内的棘轮运行位置变化分布频谱进行动态位移统计分析,得到每一个运行周期性时序窗口内的棘轮运行动态位移数据;
29、对每一个运行周期性时序窗口内的棘轮运行动态位移数据进行时序变化窗口合并,得到棘轮运行动态位移时序变化数据。
30、进一步的,所述基于棘轮运行位置变化分布幅值数据对棘轮运行位置时序同步变化数据进行周期性时序窗口划分包括以下步骤:
31、对棘轮运行位置变化分布幅值数据进行位置分布幅度图绘制,以生成棘轮运行位置分布幅度图;
32、对棘轮运行位置分布幅度图进行变化幅度特征分析,得到棘轮运行位置分布变化幅度特征描述数据;
33、基于棘轮运行位置分布变化幅度特征描述数据对棘轮运行位置分布幅度图进行幅度周期性时序窗口设计,以生成棘轮位置变化幅度周期性时序窗口划分规则;
34、根据棘轮位置变化幅度周期性时序窗口划分规则对棘轮运行位置分布幅度图内的时序变化进行时序分段处理,得到每一个周期性时序窗口对应的时序分片段范围;
35、基于每一个周期性时序窗口对应的时序分片段范围对相对应的棘轮运行位置时序同步变化数据进行周期性时序窗口划分,以得到每一个运行周期性时序窗口内的棘轮运行位置变化数据。
36、进一步的,步骤s24包括以下步骤:
37、步骤s241:对每一个运行时间点位处的棘轮运行动态位移数据内的首尾时间点位进行棘轮运行瞬时速度计算,得到首尾运行时间点位处的棘轮运行瞬时速度;
38、步骤s242:对每一个运行时间点位处的棘轮运行动态位移数据内其余时间点位中任意相邻三个时间点位之间进行动态位移总量统计分析,得到其余任意相邻三个运行时间点位之间的棘轮运行动态位移总量;
39、步骤s243:对其余任意相邻三个运行时间点位之间的棘轮运行动态位移总量进行棘轮运行平均速度计算,得到其余任意相邻三个运行时间点位之间的棘轮运行平均速度;
40、步骤s244:通过将其余任意相邻三个运行时间点位之间的棘轮运行平均速度确定为中间运行时间点位处的棘轮运行瞬时速度,以得到其余运行时间点位处的棘轮运行瞬时速度;
41、步骤s245:对首尾运行时间点位处的棘轮运行瞬时速度以及其余运行时间点位处的棘轮运行瞬时速度进行时序合并,以得到棘轮运行速度变化数据。
42、进一步的,步骤s3包括以下步骤:
43、步骤s31:分别对棘轮运行速度变化数据以及棘轮运行旋转角度变化数据进行变化波动曲线绘制,以生成棘轮运行速度变化波动曲线图以及棘轮运行旋转角度变化波动曲线图;
44、步骤s32:对棘轮运行速度变化波动曲线图进行速度变化波动模式识别分析,得到棘轮运行速度变化波动模式;
45、步骤s33:对棘轮运行旋转角度变化波动曲线图进行旋转角度变化波动模式识别分析,得到棘轮运行旋转角度变化波动模式;
46、步骤s34:对棘轮运行速度变化波动模式以及棘轮运行旋转角度变化波动模式进行棘轮运行异常监测,以得到棘轮异常运行状态,其中棘轮异常运行状态包括棘轮运行卡滞异常状态、棘轮运行偏移异常状态以及棘轮运行旋转不均匀异常状态;
47、步骤s35:通过智能分析预警装置对棘轮异常运行状态进行棘轮运行异常预警处理,以得到棘轮运行异常预警信息数据。
48、进一步的,步骤s34包括以下步骤:
49、步骤s341:对棘轮运行速度变化波动模式以及棘轮运行旋转角度变化波动模式进行变化模式异常监测判断,当棘轮运行速度变化波动模式以及棘轮运行旋转角度变化波动模式均为明显出现波动停滞或低频率波动振荡时,则将其监测判定为棘轮运行卡滞异常状态;
50、步骤s342:当棘轮运行速度变化波动模式为变化波动相对稳定且棘轮运行旋转角度变化波动模式为明显出现高频率或不规则波动振荡时,则将其监测判定为棘轮运行偏移异常状态;
51、步骤s343:当棘轮运行速度变化波动模式为明显出现高频率或不规则波动振荡且棘轮运行旋转角度变化波动模式为明显出现不均匀或不稳定波动振荡时,则将其监测判定为棘轮运行旋转不均匀异常状态。
52、进一步的,步骤s4包括以下步骤:
53、步骤s41:通过将棘轮运行异常预警信息数据上传至预设的自动扶梯智慧运维大数据平台上,并通过自动扶梯智慧运维大数据平台对棘轮运行异常预警信息数据进行异常故障诊断,得到棘轮运行异常故障问题点;
54、步骤s42:对棘轮运行异常故障问题点进行故障运维建议分析,得到棘轮运行异常故障运维建议方案;
55、步骤s43:通过自动扶梯智慧运维大数据平台对棘轮运行异常故障运维建议方案进行异常运维响应,生成自动扶梯棘轮运行异常运维响应策略,以执行相应的自动扶梯棘轮运行异常运维工作。
56、本发明的有益效果:
57、本发明所提出的自动扶梯附加制动器棘轮监测分析预警方法,与现有技术相比,本技术的有益效果在于通过在自动扶梯附加制动器棘轮结构上安装部署棘轮动态监测传感器,并通过使用部署的棘轮动态监测传感器对自动扶梯附加制动器棘轮结构进行棘轮动态变化实时监测,这些传感器能够连续地记录并传输棘轮的运行位置和运行角度的实时变化数据,以反映出棘轮在运行过程中的微小变动和动态变化。通过这种实时监测,可以及时掌握扶梯运行中棘轮的具体状态,提前发现潜在的运行问题或异常,从而有效地预防存在的安全风险,保障乘客和设备的安全。同时,通过使用自动扶梯附加制动器棘轮结构内置的专用线缆将先前采集得到的棘轮运行位置实时变化数据和棘轮运行角度实时变化数据连接传输至智能分析预警装置,这一过程确保了从传感器获取的数据能够快速、可靠地传输到中央处理系统或智能装置中进行进一步的数据分析和预警处理。通过专用线缆连接,能够确保数据传输的稳定性和安全性,避免信息丢失或干扰,从而保证监测过程对棘轮状态的准确把握和响应能力。其次,通过使用智能分析预警装置对棘轮运行位置实时变化数据内每一个运行时间点位处的棘轮运行动态位移数据进行棘轮运行速度分析,棘轮运行速度的分析不仅仅是简单的位移变化计算,更是对运动过程中速度的实时监测和分析。通过速度变化数据的精确分析,可以评估棘轮运行的稳定性和效率,及时发现异常速度变化并进行响应,保障扶梯的安全运行。还通过对每个运行时间点位处的棘轮运行角度数据进行详细的旋转角度分析,棘轮的旋转角度变化反映了其在水平方向上的运动状态,这对于评估扶梯运行的整体平稳性和可靠性至关重要。通过角度变化数据的分析,可以检测到存在的旋转不均匀或异常旋转现象,从而为后续运行状态的及时调整和维护提供科学依据。然后,通过从棘轮运行速度变化数据中分析出相应的速度变化波动模式,这种分析不仅限于简单的波动检测,还包括频率分析、振幅分析和周期性特征分析等多个方面。通过深入分析波动模式,可以识别出棘轮运行中的常见或异常模式,如突增、逐渐减小、周期性变化等,从而提前发现存在的故障问题或异常情况。还通过从棘轮运行旋转角度变化数据中分析出相应的旋转角度变化波动模式,旨在揭示棘轮在旋转角度变化方面的动态特征和规律,这种分析不仅涵盖角速度的波动模式,还考虑到方向性变化和旋转稳定性等因素。通过识别出旋转角度的波动模式,可以评估棘轮的运行稳定性和旋转均匀性,发现异常角度变化情况并进行后续处理和调整。并且,通过对先前分析得到的棘轮运行速度变化波动模式以及棘轮运行旋转角度变化波动模式进行棘轮运行异常监测,旨在捕捉棘轮出现的异常运行状态,这些异常状态包括但不限于卡滞、偏移和旋转不均匀等。通过综合分析速度和角度的波动模式,可以有效识别和定位棘轮运行中的异常情况,提前预警存在的异常故障问题,有针对性地进行维护和调整,保障设备安全和稳定运行。通过使用智能分析预警装置对检测到的棘轮异常运行状态进行处理和反馈,以得到棘轮运行异常预警信息数据,这一步骤的关键在于将异常情况转化为实际的预警信息,以便运维人员及时采取必要的措施。预警信息不仅限于报警通知,还包括异常原因分析、修复建议和未来预防措施等内容,从而能够提高了异常故障监测的及时性和准确度。最后,通过将先前预警得到的棘轮运行异常预警信息数据上传至预设的自动扶梯智慧运维大数据平台上,并针对从大数据平台获得的棘轮运行异常故障问题点进行故障运维的建议,在这一步骤中,专业的运维人员利用平台提供的数据分析工具和算法对异常问题进行深入分析和评估,通过这种分析,可以识别出造成异常的根本原因,例如设备的结构设计缺陷、零部件的磨损情况或者操作误差等。在分析的基础上,生成具体的运维建议方案,包括维修方案、替换零件建议、操作规范调整等,旨在恢复棘轮的正常运行状态,并提升棘轮结构的可靠性和稳定性。此外,还通过使用自动扶梯智慧运维大数据平台对棘轮运行异常故障运维建议方案进行异常运维响应,以根据前两个步骤的分析结果和建议,自动生成详细的异常运维响应策略,这包括具体的操作流程、人员调配安排、设备调整和监控策略等,旨在快速有效地解决棘轮的运行异常问题,通过大数据平台的实时监控和反馈机制,确保运维响应策略的实施过程中能够及时调整和优化,以最大程度地减少自动扶梯棘轮结构的停机时间和生产损失。
本文地址:https://www.jishuxx.com/zhuanli/20241106/325143.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表