一种机器人腿部结构及人形机器人的制作方法
- 国知局
- 2024-11-12 13:41:41
本技术属于机器人,具体涉及一种机器人腿部结构及人形机器人。
背景技术:
1、机器人技术是目前世界各国科研人员公认的高新技术,它集合了机械设计、计算机与信息处理技术、自动化、传感器应用技术和人工智能技术等多门学科的最新研究成果,可以说机器人技术是当之无愧的机电一体化技术的综合体。长期以来机器人技术主要用在生产过程自动化,代替人工完成一些简单和重复性的劳动和/或进行一些高危工作,这类机器人统称为工业机器人。与此同时发展起来的另一类机器人就是人形机器人,尤其是近年来随着人工智能技术的发展,赋予此类机器人智能化水平,加之其具备仿真人动作能力,因此该类机器人可用于抢险救灾、排雷排爆、地址勘探、安保、娱乐及教育等各个领域。
2、从外形来说,人形机器人具有与人类相似的肢体结构,包括头部、躯干、双臂和双腿等,且双臂、双腿等各处还设置灵活的关节以实现其多个动作的完成。但有的人形机器人,其腿部结构大多使用旋转舵机来控制关节自由度,采用旋转舵机会造成机器人腿部结构尺寸较大,堆叠困难,整体惯量大,对旋转舵机的力矩需求也比较大,因此造成现有人形机器人行走稳定性差、控制复杂且整体结构笨重。
3、有鉴于此,特提出此实用新型。
技术实现思路
1、本实用新型的目的在于克服上述现有技术的缺点,提供一种机器人腿部结构及人形机器人,用于解决现有腿部结构尺寸大、堆叠困难,整体惯量大,对驱动机构的力矩需求高,导致现有人形机器人行走稳定性差、控制复杂且整体结构笨重等问题。
2、本实用新型的目的是通过以下技术方案来解决的:
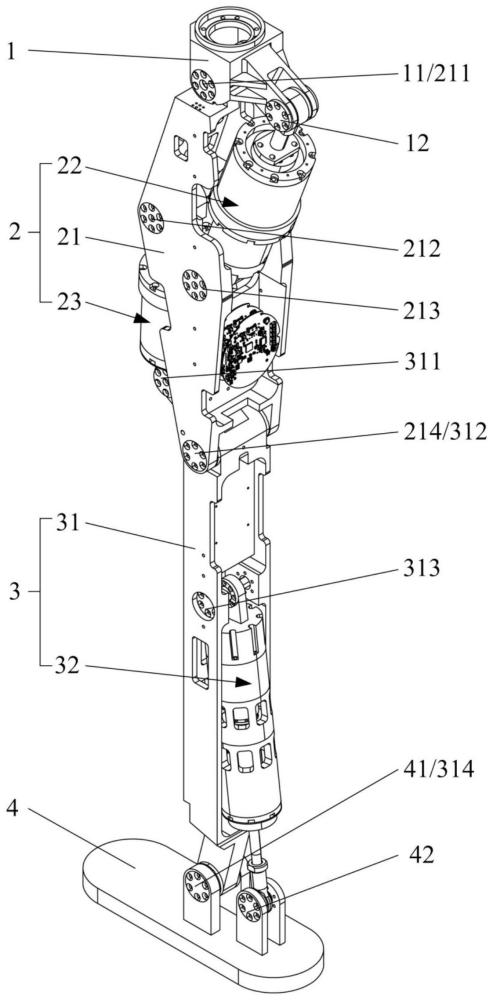
3、一方面,本实用新型提供一种机器人腿部结构,包括:
4、髋关节固定座,其前后依次设有第一铰接点和第二铰接点;
5、大腿部,包括大腿本体、第一驱动机构和第二驱动机构,所述大腿本体由上往下依次设有第三铰接点、第四铰接点、第五铰接点和第六铰接点,所述大腿本体在重叠的第一铰接点和第三铰接点处与髋关节固定座铰接,所述第一驱动机构的固定端铰接于第五铰接点、伸缩端铰接于第二铰接点;
6、小腿部,包括小腿本体和第三驱动机构,所述小腿本体由上往下依次设有第七铰接点、第八铰接点、第九铰接点和第十铰接点,所述小腿本体在重叠的第六铰接点和第八铰接点处与大腿本体铰接,所述第二驱动机构的固定端铰接于第四铰接点、伸缩端铰接于第七铰接点;
7、拟足板,前后依次设有第十一铰接点和第十二铰接点,所述拟足板在重叠的第十铰接点和第十一铰接点处与小腿本体铰接,所述第三驱动机构的固定端铰接于第九铰接点、伸缩端铰接于第十二铰接点。
8、进一步地,所述第一铰接点、第三铰接点、第五铰接点、第六铰接点、第八铰接点以及第九铰接点的中心连线位于同一直线上,且所述直线垂直于地面。
9、进一步地,在站立状态下,所述第一铰接点、第三铰接点、第五铰接点、第六铰接点、第八铰接点以及第九铰接点的中心连线位于同一直线上,且所述直线垂直于地面。
10、进一步地,以所述直线为界进行划分,所述第二铰接点和第十二铰接点均位于所述直线的后侧,所述第四铰接点、第七铰接点和第十一铰接点均位于所述直线的前侧,且所述第四铰接点和第七铰接点的中心连线相对与水平面呈倾斜设置,其倾斜的角度α为锐角。
11、进一步地,所述大腿本体和小腿本体均采用一体成型的框梁结构,且所述框梁结构上设有减重孔,所述第一驱动机构、第二驱动机构以及第三驱动机构均相对应的安装于所述框梁结构内。
12、进一步地,所述拟足板的底部设置有弹性层,用于缓冲落地时对整个腿部结构的冲力,同时在所述拟足板的底部还设置有用于辅助步态控制的六维力矩传感器;
13、所述大腿本体、小腿本体以及拟足板上均安装有用于辅助步态控制的陀螺仪或/和mark点。
14、进一步地,所述第一驱动机构、第二驱动机构以及第三驱动机构均为电动推杆驱动结构,用于执行相应的推拉动作。
15、进一步地,所述电动推杆驱动结构包括固定连接的第一筒状壳体和第二筒状壳体,所述第一筒状壳体内设有驱动电机以及与所述驱动电机连接的空心转轴,所述空心转轴伸入第二筒状壳体的一端设有断电自锁装置,另一端固定连接有丝杠螺母,所述丝杠螺母内螺接有伸出第一筒状壳体的丝杠,所述丝杠远离丝杠螺母的一端固设有轴承座,所述轴承座内设有与髋关节固定座或小腿本体铰接的第一球面关节轴承;所述第二筒状壳体远离轴承座的一端固定连接有后盖座,所述后盖座内设有与大腿本体铰接的第二球面关节轴承;
16、其中,所述第一驱动机构和第二驱动机构的驱动电机为整体式,所述空心转轴套设在驱动电机的内转子上;所述第三驱动机构的驱动电机为分体式,其转子通过联轴器与空心转轴固定连接。
17、进一步地,所述断电自锁装置包括法兰盘轴、磁性环、抱闸和编码器,所述法兰盘轴、磁性环和抱闸均位于第二筒状壳体内,所述法兰盘轴与空心转轴固定连接,所述磁性环和抱闸均设于法兰盘轴的周向上,所述编码器设于后盖座的内壁上并与控制系统连接,用于配合磁性环记录空心转轴的旋转角度。
18、进一步地,所述第一驱动机构、第二驱动机构和第三驱动机构均通过快拆结构与相应的髋关节固定座、大腿本体、小腿本体以及拟足板铰接;
19、所述快拆结构包括具有法兰盘的台阶销轴、套筒以及盖板,所述台阶销轴的小端周面上套设有套筒,所述套筒的端面与台阶销轴的台阶面限定相应驱动机构的固定端/伸缩端两侧轴承的位置,防止驱动机构左右摆动,所述台阶销轴远离法兰盘的一端开设有螺纹孔,所述盖板通过螺钉与台阶销轴及铰接对象可拆卸连接,同时所述法兰盘与铰接对象可拆卸连接,方便更换相应驱动机构。
20、另一方面,本实用新型提供一种人形机器人包括头部、与所述头部连接的躯干以及连接于所述躯干上以模仿人体四肢的两腿部结构和两手臂结构,所述腿部结构采用以上所述的机器人腿部结构。
21、与现有技术相比,本实用新型具有以下有益效果:
22、本实用新型提供的机器人腿部结构,主要由髋关节固定座、大腿部、小腿部以及拟足板组成;其中,第一驱动机构铰接于髋关节固定座与大腿本体之间,用于驱动大腿部、小腿部和拟足板围绕髋关节固定座与大腿本体的铰接点旋转;第二驱动机构铰接于大腿本体与小腿本体之间,用于驱动小腿部和拟足板围绕大腿本体与小腿本体的铰接点旋转;第三驱动机构铰接于小腿本体与拟足板之间,用于驱动拟足板围绕其与小腿本体的铰接点旋转;另外大腿本体与小腿本体采用框梁结构,驱动机构设于其内,站立状态下多个铰接点位于与地面垂直的同一直线上,且大腿部的两个驱动机构一前一后布设,可以使腿部尺寸变小,加之拟足板上的两个铰接点位于该直线的前后两侧,增加力臂,实现降低对驱动机构推力的需求,从而进一步减少尺寸;此外本实用新型的驱动机构中的伸缩端通过丝杠的伸长或者缩回实现推拉功能,相较于传统的螺母在丝杠上移动来实现推拉功能,可大幅缩小腿部体积,同时该驱动机构在断电情况下,具备自锁功能,从而实现断电状况下腿部结构可以稳定站立的目的,且每个驱动机构的两端与铰接对象均通过快拆结构连接,方便后续维护更换。
本文地址:https://www.jishuxx.com/zhuanli/20241112/325707.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表