一种基于空化特征参数感知的水轮机空化状态监测方法、产品及设备与流程
- 国知局
- 2024-11-18 18:16:41
本发明涉及水力空化,特别是涉及一种基于空化特征参数感知的水轮机空化状态监测方法、产品及设备。
背景技术:
1、对于采用高压、大流量流体作为工作介质的水轮机而言,空化问题一旦发生可能会引起机组振动,导致噪声加剧,从而改变机组的流量特性,甚至引发空蚀,最终威胁到机组的安全与稳定运行。水轮机内部的空化和空蚀现象不仅会加速设备的损坏,还会导致运行不稳定、性能降低、运维成本增加以及维修费用上升。因此,为了提升设备的使用寿命并降低由空化引起的损害,对大型机组进行空化状态监测并预测其损害程度是至关重要的。
2、水轮机的空化研究作为水力空化领域的一个重要分支,自1891年空化现象被发现以来,一直是科学研究和工程实践中的热点。历史上对空化的形成、特性、监控、诊断和预防等方面进行了广泛研究。虽然国内外众多研究者已经对空化的产生原理、数值模拟、信号特征及识别方法以及水轮机空化监测技术进行了深入研究,但目前的研究成果主要集中在模型实验上,针对现场尤其是大型水轮机的详细原型测试报告仍然较为缺乏,无法准确判断水轮机的空化状态及其损害程度。
技术实现思路
1、本发明的目的是提供一种基于空化特征参数感知的水轮机空化状态监测方法、产品及设备,以提高水轮机空化状态监测的准确性。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于空化特征参数感知的水轮机空化状态监测方法,包括:
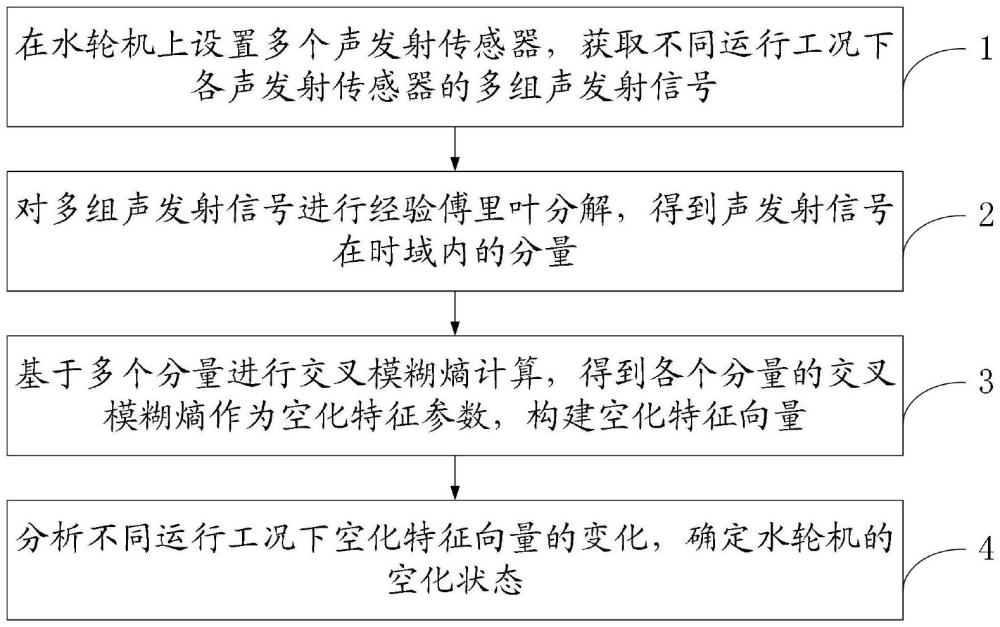
4、在水轮机上设置多个声发射传感器,获取不同运行工况下各声发射传感器的多组声发射信号;
5、对多组声发射信号进行经验傅里叶分解,得到声发射信号在时域内的分量;
6、基于多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵作为空化特征参数,构建空化特征向量;
7、分析不同运行工况下空化特征向量的变化,确定水轮机的空化状态。
8、可选地,所述在水轮机上设置多个声发射传感器,获取不同运行工况下各声发射传感器的多组声发射信号,具体包括:
9、在水轮机的尾水门处布设一个声发射传感器;
10、在水轮机的顶盖上沿边缘每隔120°布设一个声发射传感器;
11、利用每个声发射传感器获取不同运行工况下的多组声发射信号;所述不同运行工况包括空载运行工况以及不同负载下的运行工况。
12、可选地,所述对多组声发射信号进行经验傅里叶分解,得到声发射信号在时域内的分量,具体包括:
13、对声发射信号进行傅里叶变换,得到声发射信号的傅里叶频谱;
14、采用改进分割技术对傅里叶频谱进行分割,得到分割后的多个连续的频率段;
15、基于分割后的每个频率段的边界构建理想滤波器组;
16、采用理想滤波器组对傅里叶频谱进行滤波,得到滤波后的信号;
17、对滤波后的信号进行傅里叶反变换,得到声发射信号在时域内的分量。
18、可选地,所述对声发射信号进行傅里叶变换,得到声发射信号的傅里叶频谱,具体包括:
19、对声发射信号f(t)采用公式进行傅里叶变换,得到声发射信号的傅里叶频谱其中,ω为频率;t为时间。
20、可选地,所述采用改进分割技术对傅里叶频谱进行分割,得到分割后的多个连续的频率段,具体包括:
21、采用改进分割技术,通过公式计算傅里叶频谱中第n个频率段的边界ωn;其中,n为频率段个数;1≤n≤n;表示频率ωn和频率ωn+1之间的傅里叶频谱幅度;
22、基于傅里叶频谱中每个频率段的边界对傅里叶频谱进行分割,得到分割后的多个连续的频率段。
23、可选地,所述基于分割后的每个频率段的边界构建理想滤波器组,具体包括:
24、基于分割后的第n个频率段的边界ωn构建理想滤波器组
25、可选地,所述基于多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵作为空化特征参数,构建空化特征向量,具体包括:
26、选取包含主要信息的多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵;
27、将第i个分量的交叉模糊熵作为空化特征参数ei,i=1,2,…,k,构建空化特征向量h=[e1,e2,…,ek];其中,k为分量个数。
28、可选地,所述选取包含主要信息的多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵,具体包括:
29、选取包含主要信息的多个分量作为时间序列{u(i),1≤i≤m}和{v(j),1≤j≤m},其中,i表示时间序列中第i个点;j表示时间序列中第j个点;m是时间序列总共的点数;
30、给定嵌入维数m,分别构造m-m个向量{u(i),u(i+1),…,u(i+m-1),1≤i≤m-m}和m-m个向量{v(j),v(j+1),…,v(j+m-1),1≤j≤m-m};
31、给定嵌入维数m,构建时间序列{u(i),1≤i≤m}对应的m维向量和时间序列{v(j),1≤j≤m}对应的m维向量
32、计算和之间的距离其中,表示找出m个|u(i+k)-v(j+k)|的最大值;u(i+k)为构造的m-m个向量{u(i),u(i+1),…,u(i+m-1),1≤i≤m-m}的第k个向量;v(j+k)为构造的m-m个向量{v(j),v(j+1),…,v(j+m-1),1≤j≤m-m}的第k个向量;
33、基于和通过模糊函数确定各时间序列对应的m维向量之间的相似度其中,模糊函数为指数函数,r和n分别为指数函数边界的宽度和梯度;
34、根据定义交叉模糊熵cfe(m,n,r,m),其中,
35、为各时间序列对应的m+1维向量之间的相似度,从而得到各个分量的交叉模糊熵。
36、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现所述基于空化特征参数感知的水轮机空化状态监测方法。
37、一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现所述基于空化特征参数感知的水轮机空化状态监测方法。
38、根据本发明提供的具体实施例,本发明公开了以下技术效果:
39、本发明提供了一种基于空化特征参数感知的水轮机空化状态监测方法、产品及设备,通过结合经验傅里叶分解和交叉模糊熵对水轮机的空化信号特征(空化特征参数)进行提取,基于精准提取的水轮机的空化特征参数,提高水轮机空化状态监测的准确性,并且能实现对潜在故障的早期预警,为维护检修提供了重要的决策支持。
技术特征:1.一种基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,包括:
2.根据权利要求1所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述在水轮机上设置多个声发射传感器,获取不同运行工况下各声发射传感器的多组声发射信号,具体包括:
3.根据权利要求1所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述对多组声发射信号进行经验傅里叶分解,得到声发射信号在时域内的分量,具体包括:
4.根据权利要求3所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述对声发射信号进行傅里叶变换,得到声发射信号的傅里叶频谱,具体包括:
5.根据权利要求4所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述采用改进分割技术对傅里叶频谱进行分割,得到分割后的多个连续的频率段,具体包括:
6.根据权利要求5所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述基于分割后的每个频率段的边界构建理想滤波器组,具体包括:
7.根据权利要求1所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述基于多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵作为空化特征参数,构建空化特征向量,具体包括:
8.根据权利要求7所述的基于空化特征参数感知的水轮机空化状态监测方法,其特征在于,所述选取包含主要信息的多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵,具体包括:
9.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-8中任一项所述的基于空化特征参数感知的水轮机空化状态监测方法。
10.一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-8中任一项所述的基于空化特征参数感知的水轮机空化状态监测方法。
技术总结本发明公开一种基于空化特征参数感知的水轮机空化状态监测方法、产品及设备,涉及水力空化技术领域。所述方法包括:在水轮机上设置多个声发射传感器,获取不同运行工况下各声发射传感器的多组声发射信号;对多组声发射信号进行经验傅里叶分解,得到声发射信号在时域内的分量;基于多个分量进行交叉模糊熵计算,得到各个分量的交叉模糊熵作为空化特征参数,构建空化特征向量;分析不同运行工况下空化特征向量的变化,确定水轮机的空化状态。本发明提供的基于空化特征参数感知的水轮机空化状态监测方法、产品及设备,能够提高水轮机空化状态监测的准确性。技术研发人员:安学利,潘罗平,刘淇元,刘杰,李江锋,崔子建,薛起耀,吴挺玮,齐昕洋受保护的技术使用者:中国水利水电科学研究院技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/327978.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表