一种基于视频识别的在线叶轮不平衡检测方法及系统与流程
- 国知局
- 2024-11-19 09:29:59
本发明属于风力发电,特别涉及一种基于视频识别的在线叶轮不平衡检测方法及系统。
背景技术:
1、由于风力发电机长期工作在负载变化较大和恶劣的环境条件,随着服役时间的增加,可能出现疲劳损伤、叶轮偏载等健康指标下降情况。也可能由于生产精度或者安装质量导致叶轮出现不平衡的现象。叶轮不平衡轻则使风机补风效率下降,重则可能使叶片出现严重故障甚至倒塔。叶轮不平衡故障为风机故障较常见的故障类型,通过对叶轮不平衡故障的监测,可以在早期发现叶轮不平衡现象,降低故障率,加强风电机组可靠运行。
2、目前主要的检测方式是在风机的主轴安装振动传感器,监测径向和轴向的振动,通过对振动数据进行分析,从而判断是否出现不平衡现象,此方法需要安装多个传感器,以及采集器,并进行一定量的布线,再对数据进行分析后判定。检测投入成本高,且在某一个传感器或电路出现故障时,维护成本更高。
技术实现思路
1、针对上述问题,本发明提供了一种基于视频识别的在线叶轮不平衡检测方法,所述检测方法包括:
2、s1、机舱上摄像机采集带有标定点的测算图像,周期性采集第一原始图像和第二原始图像,并将测算图像、第一原始图像和第二原始图像发送至处理器;
3、s2、处理器获取测算图像和第一原始图像,根据测算图像和第一原始图像计算得到叶片净空曲线和叶轮组转动数据;
4、s3、处理器获取并对第二原始图像进行计算处理,得到摄像机晃动频谱数据;
5、s4、处理器根据摄像机晃动频谱数据和叶轮组转动数据综合分析确定叶轮组不平衡运行状态。
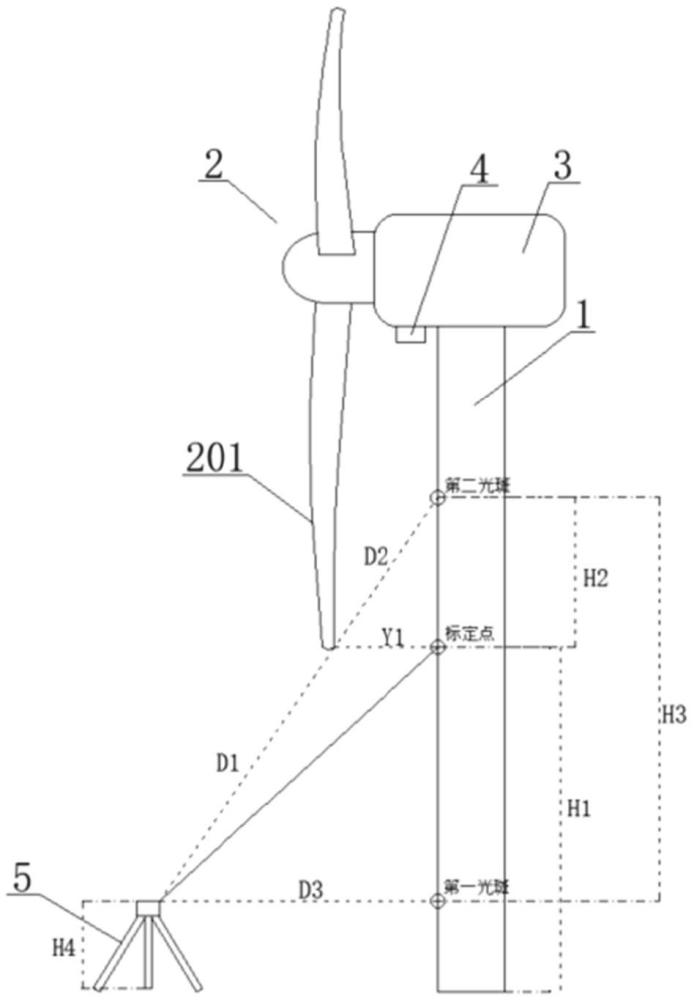
6、进一步的,所述测算图像为标定叶片旋转到叶轮组最下方且该标定叶片轴线与塔筒轴线共面时,摄像机以从上向下拍摄方向拍摄获取的包含标定叶片和标定点的图像;
7、所述第一原始图像为包含第一矩形感兴趣区域的图像;
8、所述第二原始图像为包含第二矩形感兴趣区域的图像。
9、进一步的,所述叶片净空曲线和叶轮组转动数据的计算方法包括:
10、s21、根据测算图像计算出像素距离和实际距离的映射公式;
11、s22、识别并标记各第一原始图像上的有效检测角点,测量各有效检测角点与标定点的第二像素距离;
12、s23、根据映射公式和第二像素距离计算出各有效检测角点与标定点的实际距离,并构建对应叶片净空曲线;
13、s24、根据叶片净空曲线计算得到叶轮组转动数据。
14、进一步的,所述映射公式的计算方法包括:
15、s211、测量测算图像上标定叶片的叶尖与标定点的第一像素距离;
16、s212、利用激光标定仪测量计算现实空间中标定叶片的叶尖与标定点的第一实际距离;
17、s213、根据第一像素距离和第一实际距离计算出映射公式。
18、进一步的,所述有效检测角点的识别方法包括:
19、s221、采用分割模型对第一原始图像进行分割处理,得到包含叶片前景轮廓和标定点的第二图像;
20、s222、通过角点检测模型对第二图像进行提取处理,得到标记有检测角点和标定点的第三图像;
21、s223、检验第三图像中的各检测角点的有效性,删除无效检测角点,保留有效检测角点,得到标记有有效检测角点和标定点的第四图像;
22、s224、测量第四图像中有效检测角点与标定点的第二像素距离。
23、进一步的,所述摄像机晃动频谱数据的计算方法包括:
24、s31、对第二原始图像进行边缘提取处理,得到边缘线图像;
25、s32、分析边缘线图像,生成频谱数据。
26、进一步的,所述边缘提取处理包括:
27、s311、对第二原始图像进行增强处理,得到第五图像;
28、s312、选定抓取第五图像中的第二矩形感兴趣区域,得到第六图像;
29、s313、对第六图像或第七图像进行边缘检测处理,得到边缘线图像。
30、进一步的,所述分析边缘线图像包括:
31、s321、采集摄像机晃动幅值数据;其中,摄像机晃动幅值数据包括摄像机左右晃动幅值数据和摄像机前后晃动幅值数据;
32、s322、对摄像机晃动幅值数据进行时序傅里叶变换,得到摄像机晃动频谱数据。
33、进一步的,所述检测方法还包括:
34、s5、处理器将同一叶轮组中多个叶片的叶片净空曲线进行对比,判断各叶片状态。
35、本发明还提供了一种基于视频识别的在线叶轮不平衡检测系统,所述检测系统包括:
36、激光标定仪,用于在塔筒上设置标定点;用于测定第一实际距离;
37、摄像机,安装在机舱底部,用于采集带有标定点的测算图像,周期性采集第一原始图像和第二原始图像,像,并将测算图像、第一原始图像和第二原始图像发送至处理器;
38、处理器,用于获取测算图像、第一原始图像和第二原始图像,根据测算图像和第一原始图像计算得到叶片净空曲线和叶轮组转动数据;用于对第二原始图像进行计算处理,得到摄像机晃动频谱数据;用于根据摄像机晃动频谱数据和叶轮组转动数据综合分析确定风力发电机运行状态。
39、本发明的有益效果是:
40、1、本发明提出的检测系统不需要在风电机组上安装大量振动传感器,仅通过在机舱底部设置一台摄像机即可。系统设备数量少,布线量少。检测系统成本低且维护方便。
41、2、通过激光标定仪确定标定点,在风力发电机运行过程中即可完成,无需进行停机处理,方便快捷。并且在检测过程中,每种型号的风力发电机仅需标定一次。
42、3、通过对第三图像进行进一步检验处理,将无效的检测角点删除,仅保留有效的检测角点,有效提高了检测结果的准确性。
43、4、本发明利用摄像机周期性拍摄获取各叶片的第一原始图像,即可分析出各叶片与标定点的实际距离在检测期间的变化情况。操作方法简单,易于实现,便于后续对叶片结构性能进行分析评估。
44、5、本发明通过在机舱上设置一个摄像机采集图像,外设处理器进行图像处理分析,就能得到叶片净空曲线、叶轮组转速数据和边缘线晃动频谱数据。通过简单的检测装置获取到风力发电机较为全面的运行状态数据。
45、6、本发明通过检测获取叶片净空曲线、叶轮组转动数据和边缘线晃动频谱数据等数据,综合分析风力发电机叶轮组运行状态,确保检测结果准确可靠。
46、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:1.一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述检测方法包括:
2.根据权利要求1所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述测算图像为标定叶片旋转到叶轮组最下方且该标定叶片轴线与塔筒轴线共面时,摄像机以从上向下拍摄方向拍摄获取的包含标定叶片和标定点的图像;
3.根据权利要求1所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述叶片净空曲线和叶轮组转动数据的计算方法包括:
4.根据权利要求3所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述映射公式的计算方法包括:
5.根据权利要求3所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述有效检测角点的识别方法包括:
6.根据权利要求1所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述摄像机晃动频谱数据的计算方法包括:
7.根据权利要求6所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述边缘提取处理包括:
8.根据权利要求6所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述分析边缘线图像包括:
9.根据权利要求1-8任一所述的一种基于视频识别的在线叶轮不平衡检测方法,其特征在于,所述检测方法还包括:
10.一种基于视频识别的在线叶轮不平衡检测系统,其特征在于,所述检测系统包括:
技术总结本发明涉及风力发电技术领域,特别涉及一种基于视频识别的在线叶轮不平衡检测方法及系统。所述检测方法包括:S1、机舱上摄像机采集带有标定点的测算图像,周期性采集第一原始图像和第二原始图像,并将测算图像、第一原始图像和第二原始图像发送至处理器;S2、处理器获取测算图像和第一原始图像,根据测算图像和第一原始图像计算得到叶片净空曲线和叶轮组转动数据;S3、处理器获取并对第二原始图像进行计算处理,得到摄像机晃动频谱数据。本发明通过检测获取叶片净空曲线、叶轮组转动数据和边缘线晃动频谱数据等数据,综合分析风力发电机叶轮组运行状态,确保检测结果准确可靠。技术研发人员:刘晓枫,王瑞显,刘海振受保护的技术使用者:风之虎新能源技术(北京)有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329031.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表