导管系统、导管的驱动控制方法及存储介质与流程
- 国知局
- 2024-11-19 09:38:35
本技术涉及医疗器械,尤其涉及一种导管系统、导管的驱动控制方法以及计算机可读存储介质。
背景技术:
1、微创医疗技术主要是为了减小在医疗程序中对患者组织的损伤,具有创伤小、疼痛轻、恢复快等优势。这种微创技术可以通过患者解剖结构中的自然孔口或手术切口来执行,以使导管器械在控制器的操控下到达目标组织位置处。导管器械通常是柔性和/或可转向的细长设备,其能够被插入解剖通孔中并且朝着患者解剖结构内的目标区域导航。导管器械可以区分为具有内导管的内导管器械和具有外导管的外导管器械,其中,内导管被设置成被驱动穿过外导管的腔内。
2、现有内、外导管器械在非成对驱动模式中,仅内导管或外导管后退,或在成对驱动模式中内外导管同时后退,但这些后退控制仅涉及直线移动的情况,并没有考虑内导管、外导管处于弯曲状态下,如何进行后退的情况,导致无法满足特定场景下进行后退的问题。
技术实现思路
1、本技术的主要目的在于提供一种导管系统、导管的驱动控制方法以及计算机可读存储介质,旨在解决现有导管的驱动控制中仅考虑了直线移动,未考虑内导管、外导管处于弯曲状态下,如何进行后退的情况,导致无法满足特定场景下进行后退的技术问题。
2、为实现上述目的,本技术提供一种导管系统,所述导管系统包括:
3、机械臂;
4、外导管器械,被设置成与一个所述机械臂的动力部进行接合,所述外导管器械包括外导管;
5、内导管器械,被设置成与另一个所述机械臂的动力部进行接合,所述内导管器械包括内导管,所述内导管被设置成被驱动穿过所述外导管的腔;
6、与所述机械臂通讯连接的用户输入装置和处理器,所述处理器被配置成执行以下步骤:
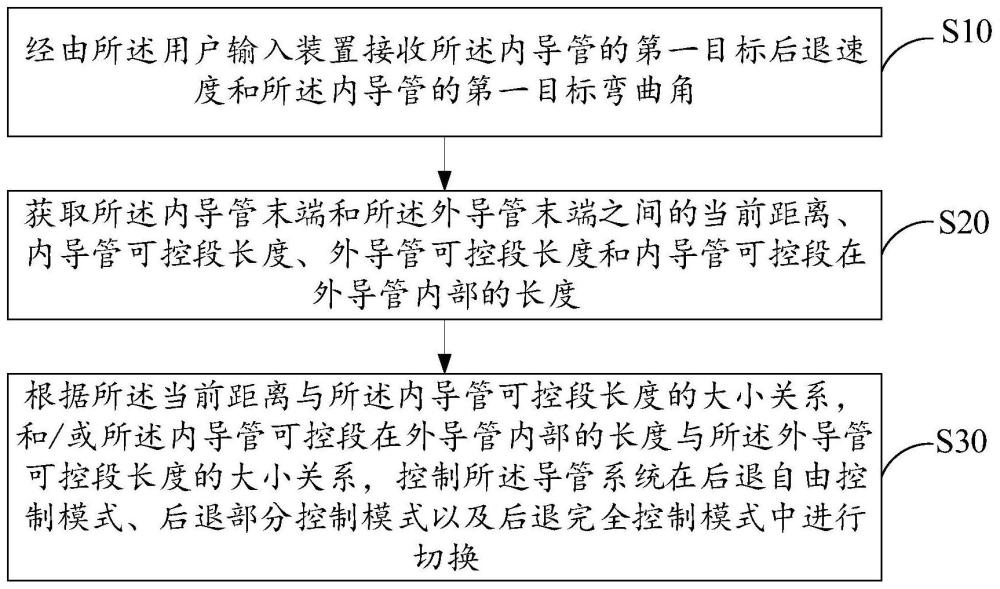
7、经由所述用户输入装置接收所述内导管的第一目标后退速度和所述内导管的第一目标弯曲角;
8、获取所述内导管末端和所述外导管末端之间的当前距离、内导管可控段长度、外导管可控段长度和内导管可控段在外导管内部的长度;
9、根据所述当前距离与所述内导管可控段长度的大小关系,和/或所述内导管可控段在外导管内部的长度与所述外导管可控段长度的大小关系,控制所述导管系统在后退自由控制模式、后退部分控制模式以及后退完全控制模式中进行切换;其中,
10、所述后退自由控制模式是响应于所述内导管的第一目标后退速度和所述内导管的第一目标弯曲角,控制所述内导管后退和弯曲,并控制所述外导管弯曲的模式;所述后退部分控制模式是响应于所述内导管的第一目标后退速度和所述内导管的第一目标弯曲角,控制所述内导管和所述外导管均后退和弯曲的模式,所述后退完全控制模式是控制所述内导管后退和弯曲,所述外导管前进和弯曲、停止和弯曲或后退和弯曲的模式。
11、可选地,所述处理器被配置成执行以下具体步骤:
12、比较所述当前距离与所述内导管可控段长度的大小关系;
13、在所述当前距离大于或等于所述内导管可控段长度时,控制所述导管系统执行所述后退自由控制模式。
14、可选地,所述处理器被配置成执行以下具体步骤:
15、在所述当前距离大于或等于所述内导管可控段长度时,控制所述内导管以所述第一目标后退速度向后移动,并弯曲到所述第一目标弯曲角;控制所述外导管停留在原地,并保持当前弯曲角不动。
16、可选地,所述处理器被配置成执行以下具体步骤:
17、比较所述当前距离与所述内导管可控段长度的大小关系,以及所述内导管可控段在外导管内部的长度与所述外导管可控段长度的大小关系;
18、在所述当前距离小于所述内导管可控段长度,且所述内导管可控段在外导管内部的长度小于所述外导管可控段长度时,控制所述导管系统执行所述后退部分控制模式。
19、可选地,所述处理器被配置成执行以下具体步骤:
20、在所述当前距离小于所述内导管可控段长度,且所述内导管可控段在外导管内部的长度小于所述外导管可控段长度时,获取所述内导管末端和所述外导管末端之间的目标距离,根据所述目标距离、所述当前距离以及所述第一目标后退速度,计算得到所述外导管的第二目标后退速度;
21、根据所述内导管可控段在外导管内部的长度、所述内导管可控段长度以及所述内导管的第一目标弯曲角,计算得到所述外导管的第二目标弯曲角;
22、控制所述内导管以所述第一目标后退速度向后移动,并弯曲到所述第一目标弯曲角;控制所述外导管以所述第二目标后退速度向后移动,并弯曲到所述第二目标弯曲角。
23、可选地,所述处理器被配置成执行以下具体步骤:
24、计算所述目标距离与所述当前距离之间的第一比值;
25、计算所述第一比值与所述第一目标速度之间的第一乘积,得到所述第二目标后退速度。
26、可选地,所述处理器被配置成执行以下具体步骤:
27、计算所述内导管可控段在外导管内部的长度与所述内导管可控段长度之间的第二比值;
28、计算所述第二比值与所述第一目标弯曲角之间的第二乘积,得到所述外导管的第二目标弯曲角。
29、可选地,在所述后退部分控制模式中,所述外导管的第二目标后退速度随着所述当前距离的变化而动态变化,直到所述外导管的第二目标后退速度与所述内导管的第一目标速度相等。
30、可选地,所述处理器被配置成执行以下具体步骤:
31、比较所述内导管可控段长度与所述外导管可控段长度的大小关系;
32、在所述内导管可控段长度大于或等于所述外导管可控段长度时,控制所述导管系统执行所述后退完全控制模式。
33、可选地,所述处理器被配置成执行以下具体步骤:
34、在所述内导管可控段长度大于或等于所述外导管可控段长度时,根据所述内导管可控段长度、所述外导管可控段长度以及所述内导管的第一目标弯曲角,计算得到所述外导管的第二目标弯曲角;
35、获取所述内导管末端和所述外导管末端之间的预设最小距离,根据所述当前距离、所述预设最小距离以及所述第一目标后退速度,计算得到所述外导管的目标速度;
36、控制所述内导管以所述第一目标后退速度向后移动,并弯曲到所述第一目标弯曲角;控制所述外导管以所述目标速度相应向前或向后移动,并弯曲到所述第二目标弯曲角。
37、可选地,所述导管系统还包括与所述机械臂通讯连接的用户输入装置,所述处理器被配置成执行以下具体步骤:
38、经由所述用户输入装置接收所述内导管的输入弯曲角,并获取外导管最大曲率;
39、判断所述输入弯曲角与所述外导管最大曲率之间的大小关系;
40、在所述输入弯曲角小于或等于所述外导管最大曲率时,将所述输入弯曲角作为所述第一目标弯曲角;
41、在所述输入弯曲角大于所述外导管最大曲率时,将所述外导管最大曲率作为所述第一目标弯曲角。
42、可选地,所述处理器被配置成执行以下具体步骤:
43、计算所述外导管可控段长度与所述内导管可控段长度之间的第三比值;
44、计算所述第三比值与所述第一目标弯曲角之间的第三乘积,得到所述外导管的第二目标弯曲角。
45、可选地,所述处理器被配置成执行以下具体步骤:
46、获取所述内导管末端和所述外导管末端之间的预设最小距离;
47、计算所述当前距离与所述预设最小距离之间的第四比值;
48、计算预设常数与所述第四比值之间的差值;
49、将所述差值与所述第一目标后退速度之间的第四乘积,得到所述外导管的目标速度。
50、可选地,在所述后退完全控制模式中,所述内导管一直后退移动,所述外导管的移动状态为前进移动、停留在原地或后退移动中的任一种。
51、本技术还提供一种导管的驱动控制方法,所述导管的驱动控制方法包括以下步骤:
52、获取内导管和外导管末端之间的当前距离、内导管可控段长度、外导管可控段长度和内导管可控段在外导管内部的长度;
53、根据所述当前距离与所述内导管可控段长度的大小关系,和/或所述内导管可控段在外导管内部的长度与所述外导管可控段长度的大小关系,控制导管系统在后退自由控制模式、后退部分控制模式以及后退完全控制模式中进行切换,以使所述内导管和所述外导管至少之一以对应模式下的目标弯曲角和目标速度进行弯曲和后退。
54、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序指令,所述计算机程序指令被配置为由处理器加载并执行实现如上所述的方法的步骤。
55、本技术提供的导管系统、导管的驱动控制方法以及计算机可读存储介质,通过控制所述导管系统在后退自由控制模式、后退部分控制模式以及后退完全控制模式中进行切换,可以使所述内导管和所述外导管至少之一以对应模式下的目标弯曲角和目标速度进行弯曲和后退。如此,可以根据所述内导管与所述外导管末端之间的当前相对位置,相应地调整所述内导管和/或所述外导管,防止所述内导管伸出所述外导管的腔外的距离过远,从而为所述内导管提供必要的保护和支撑作用,进而确保导管器械的正常功能。还可以在所述内导管可控段与所述外导管可控段部分重合时,相应调整所述内导管伸出所述外导管的距离,以防止所述外导管对所述内导管的弯曲产生干涉。另外,所述内导管并不停下等待,并由所述外导管跟随所述内导管的移动而移动的方案,可以避免用户视野突然停止,这样更符合用户的视野习惯,进而提高了用户体验。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329599.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。