一种基于解耦并联机构的五轴3D打印机
- 国知局
- 2024-11-19 10:01:19
本发明属于3d打印,具体涉及一种基于解耦并联机构的五轴3d打印机。
背景技术:
1、3d打印技术作为快速成型、增材制造领域的高新技术成果,受到了国内外学者、企事业单位的广泛关注,其增加了传统机械加工的加工方法的多样性,对未来制造业的生产模式和相关技术的融合发展具有重要意义。
2、传统的3d打印机都为xyz三轴式打印,大多为x、y轴串联运动,z轴做阶段性进给运动,但传统的层方向单向堆积打印已无法满足更加复杂的多曲面体打印任务,同时传统打印机对于悬空打印的模型需要设计支撑,操作繁琐,层层堆叠打印的力学缺陷也阻碍了3d打印技术在增材制造领域应用脚步。
3、国外开源的五轴项目open5x以prusa打印机为基体进行改造设计,其中的 y、 v、 u轴为各轴串联形式,由于各轴的设计及组装误差,经过串联运动后在末端打印平台上会持续放大该误差,致使打印工作无法高精度化。并联机构凭借其动平台的高精度和高承载能力为多轴3d打印提供了可能,相比串联形式,并联机构的动平台运动形式由多个运动分支支链合成,其精确性、刚性等方面具有良好的应用价值。
4、解耦并联机构作为并联机构领域的一个重要分支,由于其具有一对一、无耦合的运动输出特性,为许多学者研究的重点方向,在飞行模拟器、包装分拣、康复机器人、航空调频架等领域有广泛应用。
技术实现思路
1、本发明的目的是提供一种基于解耦并联机构的五轴3d打印机,用以解决一般3d打印机的堆叠打印单一,无法完成复杂曲面打印、打印件力学缺陷、运动串联耦合等问题。
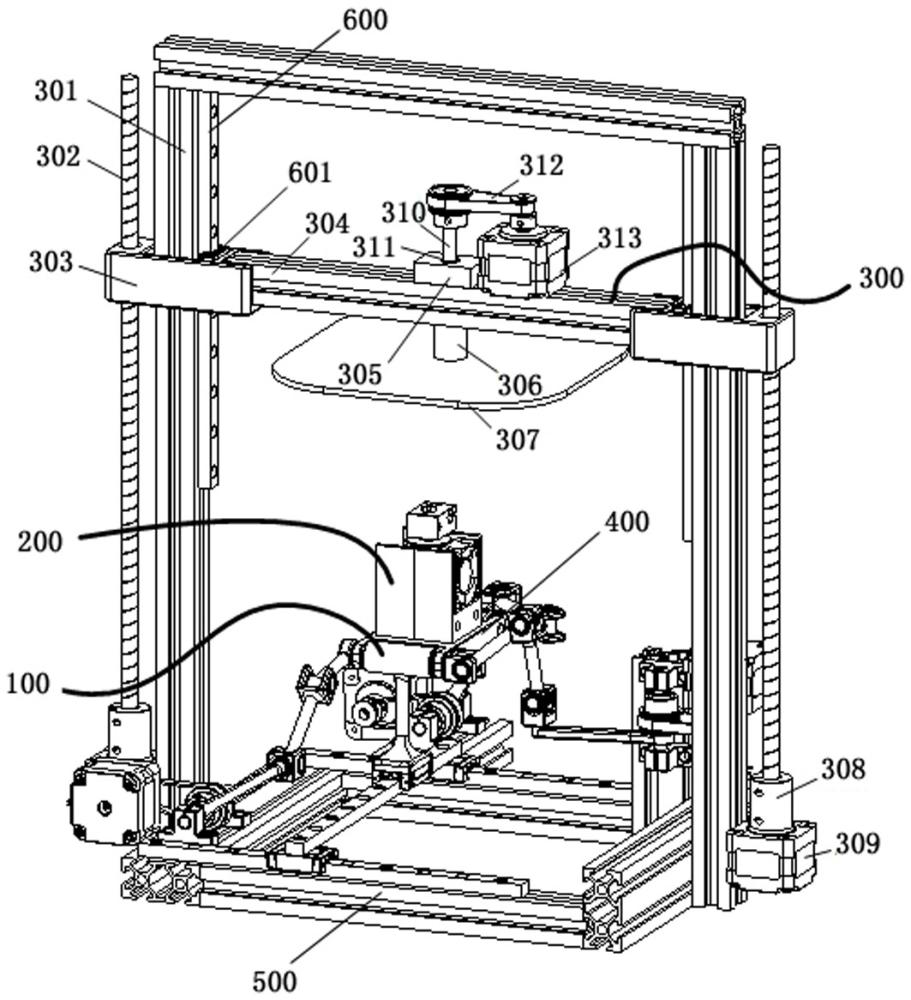
2、为了实现上述目的,本发明所采用的技术方案是:一种基于解耦并联机构的五轴3d打印机,包括解耦并联机构、打印喷头和热床机构,所述解耦并联机构包括动平台、静平台和四条分支运动链,四条分支运动链的两端分别与静平台和动平台连接;所述打印喷头连接在所述动平台上;
3、四条分支运动链包括三条主动运动链和一条纯约束运动链,三条主动运动链分别为第一分支运动链、第二分支运动链和第三分支运动链;
4、从静平台到动平台,所述第一分支运动链和第二分支运动链的结构组成均为ruru,运动链起始端的转动副与静平台上对应的运动链驱动器连接,运动链末端的万向铰与动平台固接,转动副和万向铰之间以连杆连接;
5、从静平台到动平台,所述第三分支运动链的结构组成为rurr,运动链起始端的转动副与静平台上对应的运动链驱动器连接,运动链末端的转动副与动平台连接,转动副和万向铰之间、转动副和转动副之间均以连杆连接;
6、从静平台到动平台,所述纯约束运动链的结构组成为ppr,运动链起始端的移动副与静平台连接,运动链末端的转动副与动平台连接,第二个移动副和转动副之间以连杆连接,并且两个移动副的运动方向垂直,并平行于静平台平面;
7、第一分支运动链、第三分支运动链和第四分支运动链连接在动平台的同一侧面,第二分支运动链连接在动平台上所述侧面的相对面,且第一分支运动链、第三分支运动链和第四分支运动链与动平台相连处的转动轴线共线;
8、以第三分支运动链起始端的转动副的转动轴线为 y轴,该转动副上连杆延长线与 y轴交点为原点 o,垂直于静平台平面的方向为 z轴,并由右手定则确定 x轴,建立空间坐标系 o-xyz;
9、以纯约束运动链末端的转动副转动轴线为 u轴,与该转动副相连的连杆延长线与 u轴交点为原点 o d,垂直于动平台平面的方向 w轴,并由右手定则确定 v轴,建立空间坐标系 o d - uvw;
10、所述第一分支运动链用于控制动平台沿 o-xyz坐标系的 y轴平行运动,所述第二分支运动链控制动平台绕 o d -uvw坐标系的 u轴转动,第三分支运动链控制动平台沿 o-xyz坐标系的 x轴平行运动;纯约束分支运动链用于限制动平台沿 z轴运动、绕 v轴转动和绕 w轴转动,使得动平台只具有沿 x移动、沿 y移动和绕 u轴转动的自由度;
11、所述热床机构设有热床框架和热床平台,所述热床平台通过升降组件实现在热床框架上的升降运动,升降运动方向与所述 o-xyz坐标系的 z轴平行;所述升降组件上设置有热床驱动组件,用于驱动热床平台转动,且转动轴线与所述 o-xyz坐标系的 z轴平行。
12、具体的,所述第一分支运动链包括顺次连接的第一转动副、第一连杆、第一万向铰、第二连杆、第二转动副、第三连杆和第二万向铰;第二万向铰与所述动平台固定连接;第一转动副为主动副,由设置在静平台上的运动链驱动器驱动转动;第一万向铰中具有转动轴线互相垂直的两个转动副,分别是第一万向铰转动副一和第一万向铰转动副二;第二万向铰中具有转动轴线互相垂直的两个转动副,分别是第二万向铰转动副一和第二万向铰转动副二;所述第一转动副的转动轴线、第一万向铰转动副一的转动轴线均与 o-xyz坐标系的 z轴平行;第一万向铰转动副二的转动轴线、第二转动副的转动轴线和第二万向铰转动副一的转动轴线均与 o-xyz坐标系的 y轴平行;第二万向铰转动副二的转动轴线与 o-xyz坐标系的 x轴平行。
13、具体的,所述第二分支运动链包括顺次连接的第三转动副、第四连杆、第三万向铰、第五连杆、第四转动副、第六连杆和第四万向铰;第四万向铰与所述动平台固定连接,第三转动副为主动副,由设置在静平台上的运动链驱动器驱动转动;第三万向铰中具有转动轴线互相垂直的两个转动副,分别是第三万向铰转动副一和第三万向铰转动副二;第四万向铰中具有转动轴线互相垂直的两个转动副,分别是第四万向铰转动副一和第四万向铰转动副二;第三转动副的转动轴线和第三万向铰转动副一的转动轴线均与 o-xyz坐标系的 y轴平行;第三万向铰转动副二的转动轴线、第四转动副的转动轴线以及第四万向铰转动副一的转动轴线与 o-xyz坐标系的 z轴平行;第四万向铰转动副二的转动轴线与 o-xyz坐标系的 x轴平行。
14、具体的,所述第三分支运动链包括顺次连接的第五转动副、第七连杆、第五万向铰、第八连杆、第六转动副、第九连杆和第七转动副;第七转动副与动平台连接,第五转动副为主动副,由设置在静平台的运动链驱动器驱动转动;第五万向铰具有转动轴线互相垂直的两个转动副,分别是第五万向铰转动副一和第五万向铰转动副二;第五转动副以 o-xyz坐标系的 y轴为转动轴线,第五万向铰转动副一的转动轴线与 o-xyz坐标系的 y轴平行;第五万向铰转动副二的转动轴线、第六转动副的转动轴线以及第七转动副的转动轴线均与 o-xyz坐标系的 x轴平行。
15、具体的,所述第四分支运动链包括顺次连接的第一移动副、第二移动副、第十连杆和第八转动副;第一移动副与静平台连接,第八转动副与动平台连接;第一移动副移动方向平行于 o-xyz坐标系的 x轴,第二移动副的移动方向平行于 o-xyz坐标系的 y轴,第八转动副的转动轴线与 o-xyz坐标系的 x轴平行,第十连杆垂直于第二移动副的移动方向,并与 o-xyz坐标系的 z轴平行。
16、进一步的,所述第四分支运动链还设有虚约束移动副,虚约束移动副的运动方向与第一移动副的运动方向平行;第一移动副和虚约束移动副均由直线导轨和对应的滑块组成,直线导轨固定在静平台上;第二移动副由直线导轨和第十连杆的第一端滑动连接组成,第二移动副的直线导轨的两端分别固定在第一移动副和虚约束移动副的两个滑块上。
17、具体的,所述升降组件包括直线导轨、同步丝杠、平台连接架和支撑平台,直线导轨设置在所述热床框架的立柱内侧,用于实现所述支撑平台沿直线导轨的移动,所述同步丝杠设置在所述热床框架的每根立柱外侧,同步丝杠端部通过联轴器与第二步进电机连接,支撑平台的两端分别通过平台连接架与所述立柱内侧的直线导轨滑动连接,平台连接架与所述同步丝杠配合连接;所述热床平台通过热床驱动组件设置在所述支撑平台上。
18、进一步的,所述热床驱动组件包括热床转轴、滚动轴承、固定块、同步带传动机构和第三步进电机;所述热床转轴固定连接在热床平台相背于打印喷头的一侧,热床转轴与所述支撑平台的升降方向平行,热床转轴穿过支撑平台和固定块并通过同步带传动机构连接第三步进电机,固定块内设有与热床转轴配合的滚动轴承。
19、更进一步的,所述热床平台和所述支撑平台之间还设置有套设在热床转轴上的硅胶垫。
20、具体的,所述运动链驱动器包括光轴、固定光轴的光轴支架、安装在光轴上的滚动轴承、安装在滚动轴承上的主动运动链起始端、与主动运动链起始端固接的被动同步轮、第一步进电机、安装在第一步进电机上的驱动同步轮以及与被动同步轮和驱动同步轮啮合传动的同步带;主动运动链起始端和光轴形成主动运动链的主动副,所述光轴支架和第一步进电机固定在静平台上,第一步进电机通过对驱动同步轮的驱动,带动主动运动链起始端转动,从而驱动主动运动链运动。
21、本发明的有益效果是:本发明提供一种5轴3d打印机,利用解耦并联机构的运动输出特性配合热床机构实现5轴3d打印,以解决一般3d打印机的堆叠打印单一,无法完成复杂曲面打印、打印件力学缺陷、运动串联耦合等问题,满足3d打印从简单到复杂的各阶段需求,设计精巧,打印机构的负载能力强,应用范围广,对增材制造领域具有较高的实用价值。
本文地址:https://www.jishuxx.com/zhuanli/20241118/331147.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表