一种关节间可线控锁定的可变刚度线驱动连续体机器人
- 国知局
- 2024-11-25 15:09:30
本发明涉及医疗器械,特别涉及一种关节间可线控锁定的可变刚度线驱动连续体机器人。
背景技术:
1、在现今医疗器械领域,医用手术机器人主要分为刚性手术机器人和柔性手术机器人两种。对于刚性手术机器人,其在设计和控制技术方面相对成熟,通常具有刚性机械臂和关节,能够进行精确且稳定的位置控制和操作;在医疗手术技术领域,尤其是在微创手术中运用十分广泛。但是,刚性机器人在面对非结构化环境时常表现出较差的适应性和较低的柔顺性,限制了其在复杂、狭小空间中的应用。对于柔性手术机器人,其能够灵活地改变自身姿态以适应更为复杂的环境障碍物分布,在狭小、非结构化环境下具有独特的适应能力。在医疗领域,柔性手术机器人凭借其良好的柔顺性和灵活性,被用于内镜诊断和治疗、微创手术等操作,展现出巨大的应用潜力和实际价值。
2、柔性手术机器人包含连续体机器人、同心管机器人等,其中连续体机器人常使用线绳进行驱动控制,此类机器人一般被称为线驱动连续体机器人。对于线驱动连续体机器人,其一般由多个关节相互连接组成,由数根贯穿于机器人内部的线绳实现对各个关节的独立或统一驱动控制。连续体机器人自身存在刚度属性,若刚度过高,则难以在非结构化的场景中工作,容易对工作环境周遭的组织及器官造成损伤;若刚度过低,意味着机器人在执行需要稳定支撑和精确定位的任务时容易发生意外扭曲或变形,影响手术安全及效率。因此,以工作场景为导向的可变刚度连续体机器人成为了当下研究的热点。
3、当前线驱动连续体机器人实现变刚度的常用方法如下:
4、1.通过主动调节或添加/去除机器人内部机构间的摩擦力以实现变刚度。
5、有一种常见方式,即在连续体机器人中设置腔体结构,腔体内包含有硬质颗粒。通过改变腔体内部压力的方式(常见方式为使用气泵装置连接通气管及机器人主体以主动控制腔体内的气压值大小),增大腔体结构内部硬质颗粒之间的摩擦力,从而提升整个结构的刚度(如cn114516070b)。
6、还有一种常见方式,即在连续体机器人关节中设置一种机械结构,通过磁场、电流等方式引发此机械结构的扭转、闭合、被夹紧(如采用电流加热sma 记忆合金来加大连接盘与驱动丝间压力,从而加大摩擦来改变机械臂刚度)等操作,以增加机器人关节间的摩擦力,达到主动控制机器人对应结构刚度的效果。
7、2.通过主动调控机器人内部填充物的相变以实现变刚度。
8、有一种常见方法,是在连续体机器人内部结构填充低熔点金属并设置加热丝,通过主动调节加热丝的加热温度以实现低熔点金属的相变,从而实现主动控制机器人对应结构刚度的效果。(如cn116728392b)。
9、3.通过机械锁定机构进行机械配合以实现变刚度。
10、现今在可变刚度连续体机器人领域中通过设置机械锁定结构进行机械配合操作从而实现变刚度的发明专利并不常见;有一种方案,是通过沿机器人“轴向”设置插齿机构,使齿与插销之间机械配合以实现连续体机器人的多角度机械锁定(如cn114209426a)。
11、通过机械锁定机构进行机械配合方案一般可以完成更快、更稳定的变刚度操作,但却难以缩小其机械结构的大小,难以完成机器人的小型化,使之在人体内较为狭窄且非结构化的环境下活动空间有限。
12、现有技术的问题与缺陷如下:
13、1.对于改变内部摩擦以实现变刚度的结构:
14、其虽然有着响应较快,可调节刚性程度的优点,但是这种方法稳定性与承力性能不足,在长期使用下,摩擦接触面可能会磨损,影响变刚度操作的稳定性和机器人的使用寿命。且此类机构常需依靠气泵、磁场、电流等装置,容易影响机器人及其操作系统的体积大小、工作安全性、操作复杂程度。
15、2.通过主动调控机器人内部填充物的相变以实现变刚度方式虽然可以做到较小的机器人及其操作系统体积,但常伴随着机器人外表温度改变、相变物质吸热放热、相对较久的变刚度操作时长等影响因素,且一般需要加入电热装置,影响手术的安全性、机器人及操作系统的复杂程度。
16、3.对于通过机械锁定机构进行机械配合以实现变刚度的结构:
17、现有进行机械配合以实现变刚度的机械锁定机构一般结构较为复杂,难以小型化。
18、现有的机械锁定结构一般轴向设置于连续体关节之间(以缩小机器人的外部直径(径向尺寸),适应微创手术或自然腔道手术的需要)。然而削减锁定机构的径向尺寸易导致此类连续体机器人各关节之间轴向距离过大,在人体内较为狭窄且非结构化的环境中活动空间有限,容易导致对器官和组织的伤害。
技术实现思路
1、本发明提供一种关节间可线控锁定的可变刚度线驱动连续体机器人,旨在解决现有变刚度线驱连续体机器人的缺点。
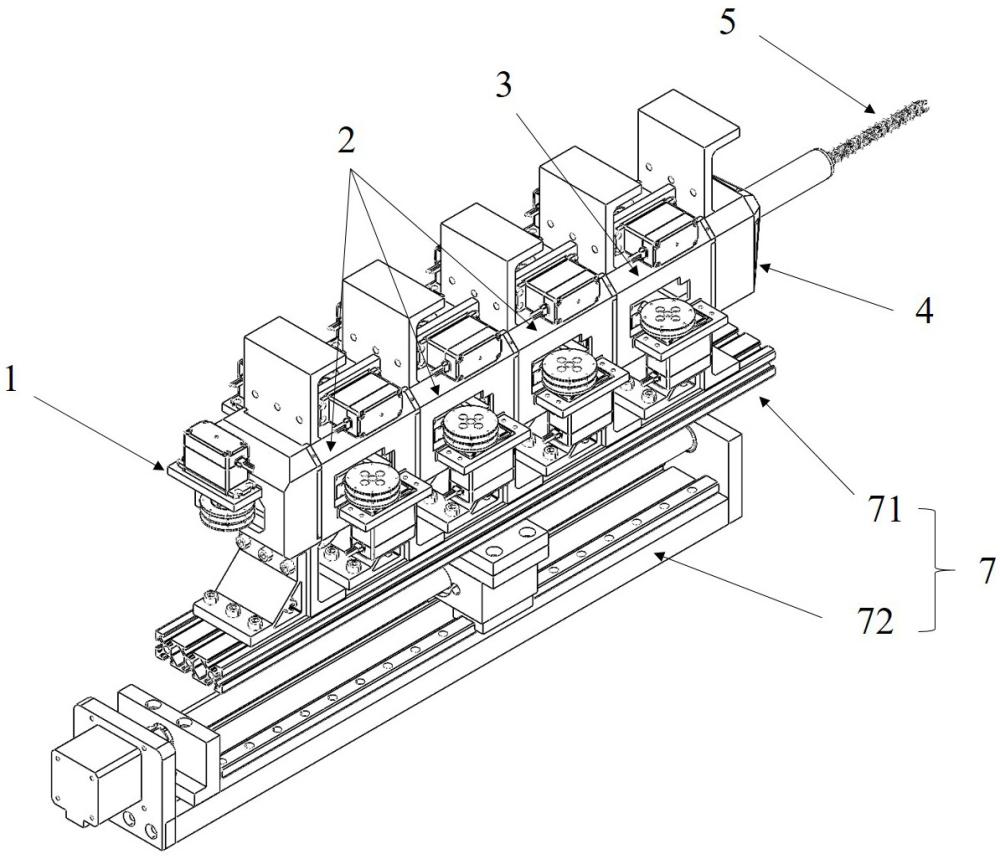
2、本发明提供一种关节间可线控锁定的可变刚度线驱动连续体机器人,包括末端执行器模块、连续体机器人模块、连续体机器人基座模块、控制操作台模块、锁定操作台模块、末端执行器操作台模块、载物平台模块,所述连续体机器人基座模块、控制操作台模块、锁定操作台模块、末端执行器操作台模块均安装于所述载物平台模块上,所述末端执行器模块安装于所述连续体机器人模块末端,所述连续体机器人模块安装于所述连续体机器人基座模块,所述连续体机器人基座模块安装于所述控制操作台模块前,所述控制操作台模块安装于所述锁定操作台模块前,所述末端执行器操作台模块安装于所述锁定操作台模块后,所述连续体机器人模块包括至少一个连续体机器人关节子模块,相邻两个所述连续体机器人关节子模块的对接处构成一个机器人关节,所述控制操作台模块通过驱动线绳控制连续体机器人模块的运动,所述锁定操作台模块通过锁定解锁线绳控制机器人关节的锁定与解锁,所述末端执行器操作台模块通过操作线绳控制末端执行器模块的开合夹取操作。
3、作为本发明的进一步改进,所述控制操作台模块包括控制操作台外壳、控制舵机、控制线轮,所述控制操作台外壳固定在载物平台模块上,所述控制操作台外壳沿轴向圆周均匀分布有若干个控制舵机,每个所述控制舵机对接一个控制线轮,所述控制线轮上设置有一个凹型的控制线槽,所述控制线槽中缠绕固定着一根驱动连续体机器人模块运动的驱动线绳。
4、作为本发明的进一步改进,所述锁定操作台模块包括锁定操作台外壳、锁定舵机、锁定线轮,所述锁定操作台外壳固定在载物平台模块上,所述锁定操作台外壳与所述控制操作台外壳拼接并固定,所述锁定操作台外壳沿轴向圆周均匀分布有若干个锁定舵机,每个所述锁定舵机对接一个锁定线轮,所述锁定线轮上设置有两个凹型的锁定线槽,两个所述锁定线槽中分别缠绕固定着两根控制机器人关节锁定与解锁的锁定解锁线绳,且两根所述锁定解锁线绳的绕线方向相反。
5、作为本发明的进一步改进,所述末端执行器操作台模块包括末端执行器操作台外壳、末端执行器舵机、末端执行器操作线轮,所述末端执行器操作台外壳与所述锁定操作台外壳拼接并固定,所述末端执行器舵机安装在末端执行器操作台外壳上,所述末端执行器舵机对接末端执行器操作线轮,所述末端执行器线轮上也设置有两个凹型的末端执行器操作线槽,两个所述末端执行器操作线槽中分别缠绕固定着两根操作线绳,且两根所述操作线绳的绕线方向相反。
6、作为本发明的进一步改进,所述连续体机器人基座模块包括连续体机器人台、连续体机器人底座,所述连续体机器人台固定在载物平台模块上,所述连续体机器人台与所述控制操作台外壳拼接并固定,所述连续体机器人台前端设有细长颈管,所述驱动线绳、锁定解锁线绳、操作线绳均收纳汇总于细长颈管中,所述连续体机器人底座固定于细长颈管处,所述连续体机器人底座包括连续体机器人连接嘴、关节转轴,所述连续体机器人连接嘴通过关节转轴与连续体机器人关节子模块铰接。
7、作为本发明的进一步改进,所述连续体机器人模块还包括径向旋转锁定机构子模块,所述连续体机器人关节子模块包括关节基座,所述关节基座中间平面的轴向远端与近端设有偏置于关节基座中心线的旋转轴套,相邻两个所述关节基座的旋转轴套通过关节转轴串联相接,所述径向旋转锁定机构子模块设置于旋转轴套旁,所述关节基座平面上绕关节中心轴设置多个通线孔,所述锁定解锁线绳穿过靠近所述关节基座中心轴的通线孔后与径向旋转锁定机构子模块连接,所述驱动线绳穿过远离所述关节基座中心轴的通线孔。
8、作为本发明的进一步改进,所述末端执行器模块由一个位于末端位的关节基座、径向旋转锁定机构子模块、末端执行机构子模块构成,所述末端执行机构子模块包括关节夹、活动夹、活动夹转轴、磁铁,所述活动夹通过活动夹转轴连接在关节基座的旋转轴套上,所述活动夹两侧各设有末端执行器线孔,所述操作线绳穿过靠近所述关节基座中心轴的通线孔后与末端执行器线孔连接,所述关节夹固定在关节底座上,所述关节夹的夹持面与活动夹的夹持面对应,两颗所述磁铁以异极相吸的形式分别固定在关节夹和活动夹的夹持面内部,所述驱动线绳的末端固定于远离所述关节基座中心轴的通线孔外端面上,所述径向旋转锁定机构子模块设置于末端位关节基座的旋转轴套旁。
9、作为本发明的进一步改进,所述径向旋转锁定机构子模块包括扳机、齿扣、磁铁,所述扳机、齿扣通过关节转轴与旋转轴套连接,所述齿扣靠近关节基座中心线的立面设置有多个突出的尖齿,所述关节基座靠近中心线一侧的旋转轴套上设有多个突出的尖齿,所述齿扣的尖齿与旋转轴套的尖齿凹凸对应;所述齿扣远离关节基座中心线的立面设置有凸轮,所述凸轮和齿扣立面之间通过斜坡过渡,所述扳机靠近所述关节基座中心线的面上设有凸钉,所述扳机上有两个对称的扳机通线孔,两个所述扳机通线孔分别连接两根锁定解锁线绳,锁定时所述扳机旋转使凸钉沿着斜坡与凸轮配合,以径向推动齿扣的尖齿与关节基座的尖齿配合;所述扳机与齿扣的对应位置各嵌入极性相反的磁铁;所述关节基座设有方型槽,所述齿扣下方设置有方型销,所述齿扣的方型销与相邻关节基座的方型槽配合。
10、作为本发明的进一步改进,所述载物平台模块包括载物型材,所述连续体机器人基座模块、控制操作台模块、锁定操作台模块、末端执行器操作台模块均固定在载物型材上。
11、作为本发明的进一步改进,所述载物平台模块还包括滑台模块,所述滑台模块包括滑台基座、滚珠丝杠、滑块、滑台连接板、电机,所述滑台基座设有直线导轨、电机固定板、丝杠支撑板,所述滚珠丝杠的两端装载在丝杠支撑板上,所述滑块滑动连接在直线导轨上并与滚珠丝杠螺纹连接,所述电机连接在电机固定板上,所述电机通过联轴器连接并驱动滚珠丝杠,所述载物型材通过滑台连接板固定在滑块上。
12、本发明的有益效果是:采用小型机械锁定机制实现线驱动连续体机器人的变刚度,相较于现有机械锁定机制其可锁定关节间轴向距离更短、外径更小,内部结构更紧凑,机械结构更简单,更加适用于医疗无创(自然腔道)或微创手术,更适合在狭小的非结构化环境中进行手术操作。机械锁定机制相较于其他连续体机器人的变刚度机制,有着响应快,费用低,耗能少,可靠稳定的优点。且本发明结构模块化程度高,具有易于扩展或减少关节数量或增加末端执行器的优点。
本文地址:https://www.jishuxx.com/zhuanli/20241125/336474.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表