一种高效版水质化验机器人的制作方法
- 国知局
- 2024-12-06 12:17:13
本发明属于水质化验,具体为一种高效版水质化验机器人。
背景技术:
1、有效且快速的水质监测是保障公共健康、维持生态平衡及促进可持续发展的关键。传统的水质检测方法主要依赖于人工取样后送至实验室进行化学分析,这一过程不仅耗时长、效率低,而且对人力和物质资源的需求较大,难以满足大规模、高频次的水质监测需求,尤其是在突发性水污染事件中反应滞后的问题尤为突出。
2、近年来,自动化和智能化技术的发展为水质监测领域带来了革新。自动水质监测站和一些初级的水质检测机器人开始被应用于河流、湖泊、水库等水体的在线监测,这些设备能够连续采集水样并进行基本的物理、化学参数分析。然而,现有技术中的水质监测机器人普遍存在几个限制:检测项目较为单一,难以完成多参数综合分析;自动化程度有限,对于复杂样品的预处理能力不足;数据分析与反馈速度慢,应急响应效率低等。
技术实现思路
1、本发明的目的在于提供一种高效版水质化验机器人,该化验机器人提供了多工位动态作业模式,在化验过程中,各操作过程能够同步进行,且能满足多种不同的化验项目,从而解决背景技术中提出的问题。
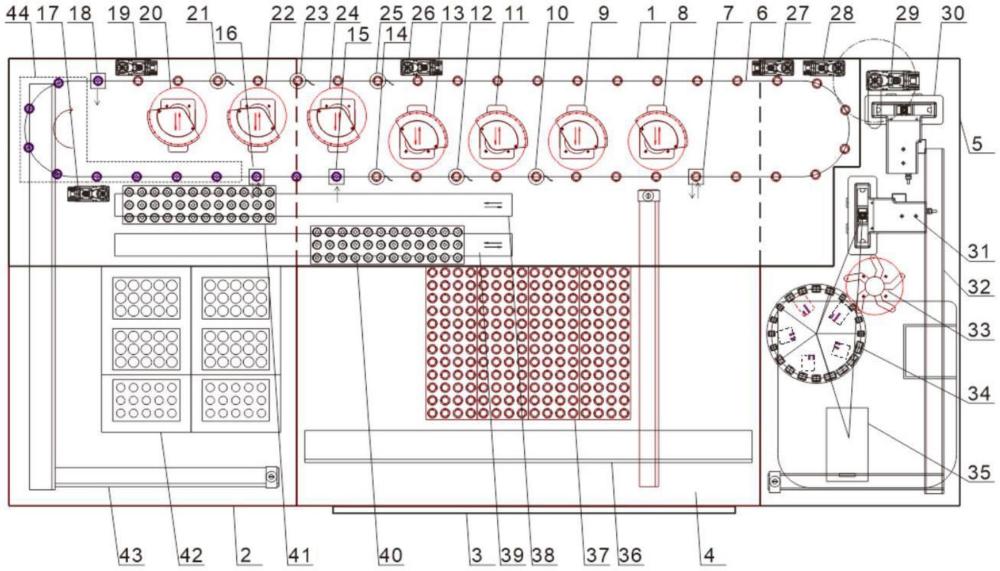
2、为实现上述目的,本发明提供如下技术方案:一种高效版水质化验机器人,包括试管传送区、消解区、水样区、试管上下料区和化验区,其中试管传送区包括一个多工位循环运动机构,该多工位循环运动机构具有多个循环运动的试管工位,在多工位循环运动机构的运动方向上,起始工位为试管上下料工位i,往后依次具有加盖工位、试管上下料工位ii、开盖工位,另外,在整个多工位循环运动机构一侧设置多个取液机构,取液机构从试管中取液;所述试管上下料区包括试管陈列区和三坐标模组ii,其中的三坐标模组ii能够在试管上下料工位i和试管陈列区之间进行试管的上下料;所述消解区包括消解仪和三坐标模组iii,其中三坐标模组iii能够将试管在试管上下料工位ii和消解仪之间转移;所述化验区包括注液机构和化验装置,其中注液机构连接所述取液机构。
3、在上述技术方案中,试管传送区具有一个多工位循环运动机构,该多工位循环运动机构具有多个循环运动的试管工位,随着多工位循环运动机构,试管上下料区可以连续向多工位循环运动机构上放置试管,且在试管随多工位循环运动机构运动的过程中,各加药机构根据预设程序自动完成加药,各取液机构能够从对应工位的试管中吸取水样并输送至化验区域,对于需要消解的试管,在经过试管上下料工位i时还会被转移至消解区完成消解,因此该水质化验机器人能够实现高效的流水线操作模式。
4、作为优选方案,在试管上下料工位ii的上游设置加盖工位,并在试管上下料工位ii下游设置开盖工位;该化验机器人具有试管帽存放区,其中三坐标模组ii从试管帽存放区夹取试管帽并盖在加盖工位处的试管上,且三坐标模组iii从经过开盖工位的试管上取下试管帽并放在试管帽存放区。对于需要消解的试管,在消解前需要加盖试管帽,根据设定,当这些试管随多工位循环运动机构移动到加盖工位时,三坐标模组ii从试管帽存放区夹取试管帽并盖在加盖工位处的试管上,而当试管加盖试管移动到开盖工位时,三坐标模组iii在试管上下料工位ii完成试管的上下料后还会移动至开盖工位取下试管帽,通过合理利用消解区和试管上下料区的三坐标模组来完成试管帽的安装与开盖工作,实现对试管帽的自动化操作。
5、作为优选方案,所述试管帽存放区包括两个双向输送装置,且在每个双向输送装置上设置一组试管帽陈列装置,两组试管帽陈列装置能够分别沿着双向输送装置移动至三坐标模组ii和三坐标模组iii的操作范围。两组试管帽陈列装置通过左右平移来交位置,使空试管帽陈列装置位于三坐标模组iii的操作范围,使装有试管帽的试管帽陈列装置位于三坐标模组ii的操作范围,这可以弥补消解区和试管上下料区两处的三坐标模组覆盖范围有限的缺陷,使从开盖工位取下的试管帽能够及时应用于加盖工位处,用有限的试管帽来满足整个化验过程中试管帽的取用和回放需求。
6、作为优选方案,在试管上下料工位ii和开盖工位之间具有多个试管工位,且在这些试管工位所在的区域设置冷却区,对于经过消解的试管,其内部压强较大,冷却区可以对经过的试管进行降温,从而降低试管内的压强,确保三坐标模组iii能够打开开盖工位的试管帽。
7、作为优选方案,在上下料工位i和加盖工位之间的具有多个工位,在这些工位的部分工位中,每隔一个工位设置一个用于添加物料的添加机构,其中靠近上下料工位i的添加机构为水剂添加机构,水剂添加机下游的均为前置加药机构;所述水剂添加机构连接水样区,前置加药机构连接独立设置的药剂柜,且在每个前置加药机构下游的工位处设置前置振荡器,试管在经过前置振荡器时进行振荡摇匀。优选地,在开盖工位的下游工位中设置多个后置加药机构,这些后置加药机构每隔一个工位设置一个,并连接所述药剂柜,且在每个后置加药机构下游的工位处设置后置振荡器,试管在经过后置振荡器时进行振荡摇匀。
8、作为优选方案,所述水样区位于试管上下料区下方,其包括水样陈列架和三坐标模组iv,其水样陈列架上设置用于放置待测水样的待测水样位,所述三坐标模组iv的末端设置末端取样组件,该末端取样组件连接所述水剂添加机构,且能够采集待测水样位处的待测水样。优选地,所述水样区还具有独立设置的应急水样位,且三坐标模组iv会优先采集应急水样位处的水样,从而可以在化验过程中对需要加急处理的水样进行插队处理。
9、作为优选方案,所述消解区具有多种不同规格的消解仪,能够满足不同的消解处理需求。
10、作为优选方案,所述化验区包括三坐标模组i、比色皿装置,还包括连接各取液机构的注液机构,其中比色皿装置具有呈环状排列的多个比色皿,且整个比色皿装置能够原位转动;注液机构具有与各取液机构一一对应的注液头,且注液机构通过转动能够使不同的注液头对准比色皿;化验区还包括光度计和比色皿清洗装置,三坐标模组i能够夹取比色皿装置上的比色皿移动至光度计,并将光度计上的比色皿移动至比色皿清洗装置进行清洗和烘干,最后将比色皿放回比色皿装置。
技术特征:1.一种高效版水质化验机器人,其特征在于:包括试管传送区、消解区、水样区、试管上下料区和化验区,其中试管传送区包括一个多工位循环运动机构,该多工位循环运动机构具有多个循环运动的试管工位,在多工位循环运动机构的运动方向上,起始工位为试管上下料工位i,往后依次具有加盖工位、试管上下料工位ii、开盖工位,另外在整个多工位循环运动机构一侧设置多个取液机构,取液机构从临近工位的试管中取液;所述试管上下料区包括试管陈列区和三坐标模组ii,其中的三坐标模组ii能够在试管上下料工位i和试管陈列区之间进行试管的上下料;所述消解区包括消解仪和三坐标模组iii,其中三坐标模组iii能够将试管在试管上下料工位ii和消解仪之间转移;所述化验区包括注液机构和化验装置,其中注液机构连接所述取液机构。
2.如权利要求1所述的一种高效版水质化验机器人,其特征在于:在试管上下料工位ii的上游设置加盖工位,并在试管上下料工位ii下游设置开盖工位;该化验机器人具有试管帽存放区,对于需要消解的试管,当其经过加盖工位时,三坐标模组ii从试管帽存放区夹取试管帽并盖在加盖工位处的试管上,且三坐标模组iii从经过开盖工位的试管上取下试管帽并放在试管帽存放区。
3.如权利要求2所述的一种高效版水质化验机器人,其特征在于:所述试管帽存放区包括两个双向输送装置,且在每个双向输送装置上设置一组试管帽陈列装置,两组试管帽陈列装置能够分别沿着双向输送装置移动至三坐标模组ii和三坐标模组iii的操作范围。
4.如权利要求3所述的一种高效版水质化验机器人,其特征在于:在试管上下料工位ii和开盖工位之间具有多个试管工位,且在这些试管工位所在的区域设置冷却区,对于经过消解的试管,在经过冷却区时进行降温。
5.如权利要求2所述的一种高效版水质化验机器人,其特征在于:在上下料工位i和加盖工位之间的具有多个工位,在这些工位的部分工位中,每隔一个工位设置一个用于添加物料的添加机构,其中靠近上下料工位i的添加机构为水剂添加机构,水剂添加机构下游的均为前置加药机构;所述水剂添加机构连接水样区,前置加药机构连接独立设置的药剂柜,且在每个前置加药机构下游的工位处设置前置振荡器,试管在经过前置振荡器时进行振荡摇匀。
6.如权利要求5所述的一种高效版水质化验机器人,其特征在于:在开盖工位的下游工位中设置多个后置加药机构,这些后置加药机构每隔一个工位设置一个,并连接所述药剂柜,且在每个后置加药机构下游的工位处设置后置振荡器,试管在经过后置振荡器时进行振荡摇匀。
7.如权利要求6所述的一种高效版水质化验机器人,其特征在于:所述水样区位于试管上下料区下方,其包括水样陈列架和三坐标模组iv,其水样陈列架上设置用于放置待测水样的待测水样位,所述三坐标模组iv的末端设置末端取样组件,该末端取样组件连接所述水剂添加机构,且能够采集待测水样位处的待测水样。
8.如权利要求2-7中任一项所述的一种高效版水质化验机器人,其特征在于:所述水样区还具有独立设置的应急水样位,且三坐标模组iv会优先采集应急水样位处的水样。
9.如权利要求2-7中任一项所述的一种高效版水质化验机器人,其特征在于:所述消解区具有多种不同规格的消解仪,用于满足不同温度、不同溶剂的消解处理需求。
10.如权利要求2-7中任一项所述的一种高效版水质化验机器人,其特征在于:所述化验区包括三坐标模组i、比色皿装置,还包括连接各取液机构的注液机构,其中比色皿装置具有呈环状排列的多个比色皿,且整个比色皿装置能够原位转动;注液机构具有与各取液机构一一对应的注液头,且注液机构通过转动能够使不同的注液头对准比色皿;化验区还包括光度计和比色皿清洗装置,三坐标模组i能够夹取比色皿装置上的比色皿移动至光度计,并将光度计上的比色皿移动至比色皿清洗装置进行清洗和烘干,最后将比色皿放回比色皿装置。
技术总结本发明属于水质化验技术领域,具体为一种高效版水质化验机器人,其由多个功能区组合而成,其中试管传送区包括一个多工位循环运动机构,在多工位循环运动机构的运动方向上,具有,试管上下料工位I、加盖工位等操作工位;试管上下料区包括三坐标模组II,该三坐标模组II能够在试管上下料工位I和试管陈列区之间进行试管的上下料;化验区包括注液机构和化验装置,其中注液机构连接所述取液机构。本发明中,多工位循环运动机构提供了多试管动态作业的基础,并在多工位循环运动机构上划定了多个操作工位,各功能区在各自对应的操作工位上分工完成各操作过程,且多项操作过程可以同步进行,因此该水质化验机器人能够显著提高化验效率。技术研发人员:李杰受保护的技术使用者:哈尔滨跃渊环保智能装备有限责任公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340465.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表