一种电池模组加工用焊接处理装置及其操作方法与流程
- 国知局
- 2024-12-06 12:42:14
本发明涉及电池模组焊接,具体为一种电池模组加工用焊接处理装置及其操作方法。
背景技术:
1、电池模组是由电池单体采用串联、并联或串并联连接方式,且只有一对正负极输出端子的电池组合体,其主要用于叉车、扫地机器人等设备。在对电池模块进行生产加工时,需要将电池模块内部多组电池单元的极柱(正负极)与汇流排进行焊接连接,实现串联、并联或串并联的导电连接关系。
2、现有公开号为cn117066686a的中国专利申请,其公开了一种电池模组双侧焊接设备,包括输送线、固定装置、汇流排焊压装置和激光焊接装置;输送线用于承载侧向放置的电池模组并输送至焊接工位;固定装置固定位于焊接工位的电池模组;两套汇流排焊压装置相对分设于焊接工位的两侧,以对电池模组两端的汇流排进行按压;每套汇流排焊压装置均设有多个焊压头,并与电池模组上的多个极柱一一相对设置,每个焊压头均设有沿轴向贯穿的通孔;两套激光焊接装置分设于输送线的两侧;激光焊接装置输出的激光能够穿过汇流排焊压装置所对应的通孔,以实现对汇流排的焊接;该发明,通过多组激光头,能够对电池模组两端同时进行汇流排的焊接,不仅操作便捷,而且提高了焊接质量和焊接效率。
3、然而,该电池模组焊接装置在具体使用时存在以下缺陷:
4、1、现有的电池模组焊接装置在将多组单体电池的极柱与汇流排进行激光焊接时,汇流排设置在电池极柱部分的顶部。传统的激光模块(包括激光头等)在发出激光束进行激光焊接时,激光束发射的区域覆盖汇流排底部的极柱且较为分散,容易导致极柱外侧与汇流排接触部分产生空包。同时焊接状态下的汇流排位置难以校准,在焊接的过程中容易发生偏移和晃动,导致焊点的位置会多次改变,影响焊接后电池模组的导电性能;
5、2、现有的电池模组焊接装置在对电池模组的极柱和汇流排焊接连接时,电池模组的极柱部分会因为多种加工流程,导致表面粘连吸附部分赃物、氧化物等。而这些赃物、氧化物等在后续将汇流排焊接至极柱的外侧时,会严重影响电池模组的导电能力和使用寿命。
技术实现思路
1、本发明的目的在于提供一种电池模组加工用焊接处理装置及其操作方法,以解决上述背景技术中提出的问题。
2、为实现上述发明目的,本发明采用如下技术方案:
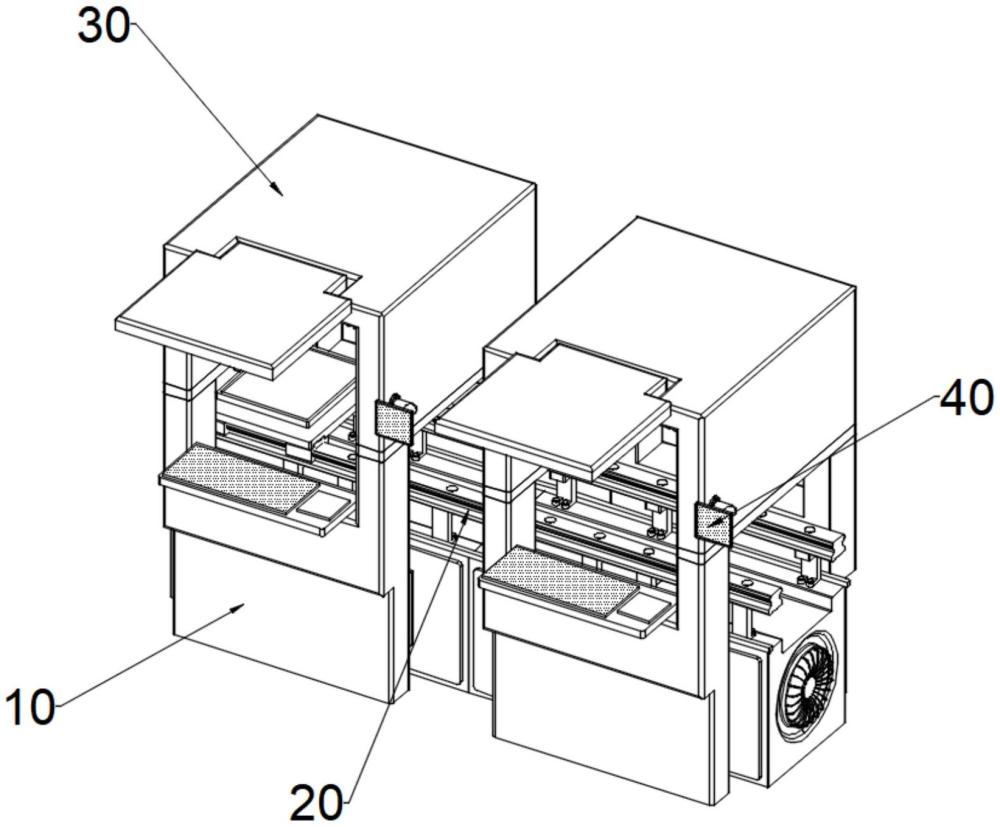
3、本发明提供了一种电池模组加工用焊接处理装置,包括设备箱组、电池输送抬升组件、激光清洗焊接机构和控制面板,所述设备箱组的顶部设置有电池输送抬升组件,所述电池输送抬升组件输送电池模组至激光清洗焊接机构的下方,且通过所述激光清洗焊接机构进行激光清洗和焊接作业,所述激光清洗焊接机构安装在设备箱组顶部的外侧,
4、所述激光清洗焊接机构包括有:
5、设备架,所述设备架安装在所述设备箱组顶部的外侧,且设置有两组,两组所述设备架的一侧通过支架连接有控制面板;
6、激光清洗组件,所述激光清洗组件设置在一组所述设备架的内顶部,且对电池模组多组极柱进行激光清洗操作,所述激光清洗组件的侧面安装有多组激光清洗模块;
7、激光焊接组件,所述激光焊接组件安装在另一组所述设备架的内顶部,且通过侧面安装的激光焊接模块对电池模组进行汇流排焊接作业,所述激光焊接组件设置在激光清洗组件的侧面,所述激光焊接组件的外侧设置有伸缩校正组件,所述伸缩校正组件挤压汇流排至电池模组极柱的顶部。
8、作为本发明的优选方案,所述电池输送抬升组件包括有:
9、底部支柱,所述底部支柱通过螺钉安装在所述设备箱组顶部的边缘处,且顶部支撑固定有两组输送滑轨,所述输送滑轨的外侧设置有输送电动滑块,
10、其中,所述输送电动滑块设置有四组,且四组所述输送电动滑块的顶部通过螺钉安装有支撑板件;
11、内凹板,所述内凹板设置在所述支撑板件内部的中心处,所述内凹板顶部的夹角处安装有多组感应支柱,所述感应支柱的顶部支撑有模组放置板,
12、其中,所述模组放置板的顶部支撑固定有电池模组,所述模组放置板的底部安装有延伸至支撑板件下方的电池升降组件。
13、作为本发明的优选方案,所述电池升降组件包括有:
14、内柱体,所述内柱体安装在所述支撑板件的内部,且延伸至所述支撑板件的底部,所述内柱体的底部安装有第一电机;
15、往复丝杆,所述往复丝杆和所述第一电机的输出端连接,且转动连接在所述内柱体的内底部,所述往复丝杆的外侧通过滚珠连接有升降轴杆,
16、其中,所述升降轴杆贯穿所述内柱体设置,且顶部安装在所述模组放置板底部的中心处。
17、作为本发明的优选方案,所述控制面板和按键模块电连接,所述按键模块安装在设备架的侧面,
18、其中,所述设备架靠近按键模块的一侧转动连接有活动门板,所述活动门板设置在按键模块的顶部。
19、作为本发明的优选方案,所述激光清洗组件包括有:
20、第一纵向滑轨,所述第一纵向滑轨安装在一组所述设备架的内顶部,且设置有两组,两组所述第一纵向滑轨的底部设置有第一纵向电动滑块;
21、横向梁,所述横向梁通过螺钉安装在两组所述第一纵向电动滑块的底部,所述横向梁的底部通过螺钉安装有多组第一竖直滑轨,所述第一竖直滑轨的侧面设置有第一竖直电动滑块;
22、安装部件,所述安装部件通过螺钉安装在所述第一竖直电动滑块的侧面,且内部安装固定有多组所述激光清洗模块,一组所述安装部件内部设置的多组激光清洗模块通过导线和一组电源模块电连接,
23、其中,所述电源模块安装在所述第一竖直滑轨的外侧。
24、作为本发明的优选方案,所述激光焊接组件包括有:
25、第二纵向滑轨,所述第二纵向滑轨安装在另一组所述设备架的内顶部,且设置有两组,两组所述第二纵向滑轨的底部设置有第二纵向电动滑块;
26、安装块,所述安装块通过螺钉安装在所述第二纵向电动滑块的底部,且两组所述安装块之间安装固定有横向滑轨,所述横向滑轨的底部设置有横向电动滑块;
27、第二竖直滑轨,所述第二竖直滑轨安装在所述横向电动滑块的底部,且侧面设置有第二竖直电动滑块,所述第二竖直电动滑块的侧面通过螺钉安装有夹具,所述夹具的内部安装有激光焊接模块。
28、作为本发明的优选方案,所述激光焊接模块和安装在所述第二竖直滑轨外侧的另一组电源模块电连接,所述夹具的左右两侧安装有伸缩校正组件,
29、其中,所述伸缩校正组件延伸至所述激光焊接模块的下方。
30、作为本发明的优选方案,所述伸缩校正组件包括有:
31、外置架,所述外置架通过螺钉安装在所述夹具的左右两侧,且内部设置为中空,所述外置架的左右两侧开设有竖直凹槽,所述竖直凹槽的内部设置有滑动连接在外置架内部的延伸杆,
32、其中,所述延伸杆延伸至所述外置架的外侧;
33、伸缩气缸,所述伸缩气缸安装在所述外置架的侧面,所述伸缩气缸的输出端连接有延伸杆;
34、下压件,所述下压件通过螺钉安装在所述延伸杆的底部,且安装在两组所述延伸杆之间,所述下压件的中心处设置有环形体,所述环形体的中心处设置为中空,且与所述激光焊接模块激光束发出部分处于同一竖直面。
35、作为本发明的优选方案,所述下压件位于所述第二竖直滑轨的底部,且内部贯穿安装有多组下压球体,
36、其中,多组所述下压球体的底部下压固定有汇流排,且所述环形体与汇流排之间留有空隙。
37、本发明还提供了包括电池模组加工用焊接处理装置的一种电池模组加工用焊接处理装置的制造方法,包括以下步骤:
38、s1、首先将组装后的电池模块放置在电池输送抬升组件的顶部,通过电池输送抬升组件将电池模块依次传输至激光清洗组件和激光焊接组件的底部,分别进行电池模块内部极柱的激光清洗以及清理后极柱和汇流排的焊接作业;
39、s2、对电池模块的极柱部分进行清洗时,采用多组激光清洗模块同时运作的方式对一排多组极柱进行激光清洗,在保证对极柱清洗效率的同时更能提升对极柱清洗的效果,避免赃物、氧化物等粘连吸附在电池模块的极柱上;
40、s3、在完成电池模块极柱部分的清理后,通过机械爪抓取运输的方式将对应数量的汇流排放置组装至极柱的外侧,方便后续通过激光焊接组件完成两者的焊接作业;
41、s4、在对电池模块极柱和汇流排进行焊接时,伸缩校正组件运作下压汇流排,保证在焊接的过程中汇流排不会发生偏移和晃动,提升焊接的精准度。同时伸缩校正组件内部中空部分方便激光焊接模块发出激光束的贯穿,限制激光焊接的范围并提升激光焊接的效果,实现效果更佳的电池模块极柱和汇流排焊接作业。
42、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
43、1、在电池模组加工用焊接处理装置及其操作方法中,对电池模组极柱部分清洗完成后,需要将清洗后的极柱与汇流排进行焊接。此时第二竖直电动滑块、夹具和激光焊接模块可在第二竖直滑轨的侧面进行升降移动,使得激光焊接模块靠近汇流排进行激光焊接操作。同时夹具在升降移动时,配合伸缩气缸带动下压件、下压球体和环形体的伸缩移动,可对待焊接的汇流排进行挤压,保证在激光焊接时汇流排不会发生偏移和晃动。其中环形体内部的中空部分,位于极柱的外侧且贴合极柱的边缘处,保证在激光焊接过程中激光束更加的集中,提升极柱与汇流排激光焊接的质量且两者激光焊接部分不会产生空包,进一步提升焊接后电池模组的导电性能;
44、2、在电池模组加工用焊接处理装置及其操作方法中,对电池模组的极柱和汇流排进行激光焊接前,可通过激光清洗模块发出激光束的方式,对极柱部分进行激光清洗操作,在保证极柱清洗效果的同时可有效避免其外侧粘连或吸附赃物和氧化物,进而提升后续在焊接完成后极柱与汇流排的导电能力。同时可一次性对电池模组顶部一排极柱进行激光清洗作业,进一步提升对电池模组极柱进行清洗的效率,从而提升整个电池模组加工的效率;
45、3、在电池模组加工用焊接处理装置及其操作方法中,对电池模组进行激光清洗和焊接时,设置且安装在模组放置板顶部的电池模块,可自动传输至激光清洗模块和激光焊接模块的底部进行激光清洗和焊接作业。同时在进行激光清洗和焊接的过程中,安装在模组放置板顶部的电池模块可通过第一电机带动输出端往复丝杆和升降轴杆进行运作的方式进行升降移动,将极柱的清洗和焊接位置移动至摄像端的一侧,保证电池模组极柱和汇流排的加工流程可实时被记录和摄像,实现自动化的电池模组生产加工作业;
46、4、在电池模组加工用焊接处理装置及其操作方法中,对电池模组的极柱进行激光清洗和焊接后,需要将上移的模组放置板和电池模组返还至初始位置。此时通过第一电机的旋转运作即可实现,操作简单方便。并且在移动到初始位置后,感应支柱会因为挤压力而感应并启动输送电动滑块进行运作实现输送操作,避免因为未能回到原位或者下降距离较短导致在后续输送的过程中,碰撞设备架或者导致电池模组晃动损伤,提升自动化作业的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342577.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表