一种货运车辆及其防追尾系统的制作方法
- 国知局
- 2024-12-06 12:51:51
本发明涉及货运车辆,特别涉及一种货运车辆及其防追尾系统。
背景技术:
1、货运车辆在长途运输时往往需要经过高速公路,而高速公路上汽车的行驶速度普遍较快,一旦发生交通事故也都比较严重,货车在被后方来车追尾后有可能发生侧翻,进一步增加事故的严重性,或威胁驾驶员的生命安全,而小车在追尾货车后,因为小车的底盘较低,所以容易撞至货车的车底,由于驾驶室与车厢尾部直接碰撞,导致小车驾驶员在事故中的死亡率极高,且货车自身也容易产生侧翻,危及驾驶员本人的生命以及影响交通安全。
2、目前,授权公告号为cn206436959u的中国专利公开了货车防追尾缓冲器,包括主面防撞板、中间支撑梁、后衬板、伸缩轴导套、伸缩轴、一级缓冲弹簧、二级缓冲弹簧和缓冲锁,主面防撞板、中间支撑梁和后衬板通过伸缩轴连接,伸缩轴导套与中间支撑梁与后衬板连接,一级缓冲弹簧和二级缓冲弹簧安装在伸缩轴上,缓冲锁安装在中间支撑梁和伸缩轴导套之间。货车防追尾缓冲器,可随时对所追尾车辆起到保护作用,能达到防撞效果,减少伤亡和降低财产损失。
3、上述现有技术方案存在以下缺陷:该防追尾缓冲器遇到低矮的车时,低矮的车还是容易撞至货车车底,没有足够的防侧翻措施,且货车驾驶员行驶时间普遍较长,注意力相对更加松懈,发生碰撞后只能依靠驾驶员危急关头的临机应变来应对事故,具有很高的不确定性。
技术实现思路
1、本发明的目的是提供一种货运车辆及其防追尾系统,以解决上述现有技术存在的问题。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
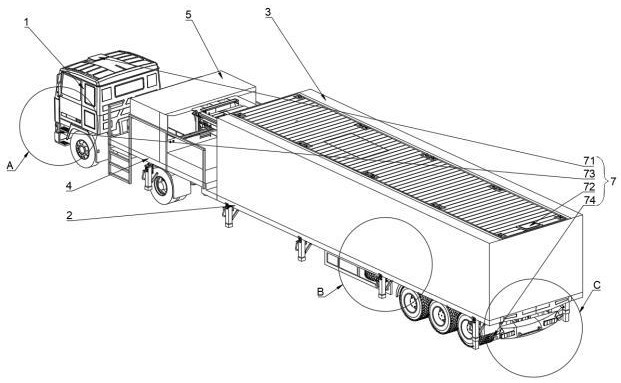
3、一种货运车辆,包括车头、设置在车头内的驱动电机和发动机、车身和货厢,所述车头与车身可拆卸连接,所述车头用于拖动车身行驶,所述货厢固定安装在车身的顶部,所述货厢与车头间隔设置,所述车头的尾部设置有固定平台,所述固定平台的顶部设置有定位引导装置,所述固定平台上设置有电池包,所述电池包与所述固定平台可拆卸的连接,所述定位引导装置用于限制电池包与固定平台的相对安装位置,所述车身的尾部设置有防撞装置,所述车头的头部和所述车身的尾部均设置有环境监控系统,所述车头的内部设置有系统控制模块,所述系统控制模块通过自动调节系统调节驱动电机,所述车身的内部设置有电子稳定系统。
4、通过采用上述技术方案,半挂车采用油电混动模式,既节省了柴油的消耗,又能够通过电池包的设计快速换电,避免冗长的充电等待时间,同时也拓宽了行程,不再将半挂车局限于短途的货运任务当中,而车身上的环境监控装置则能够对可能的碰撞做出提前预警,并通过自动调节系统对驱动电机的速度进行调整,同时,电子稳定系统对车身受撞击后保持稳定还能够提供良好的支持,车身尾部相较于普通防撞杆性能更加优异的防撞装置则能进一步保护后车驾乘人员的生命安全。
5、在进一步的实施例中,所述环境监控系统包括前置摄像头、后置摄像头、多个第一毫米波雷达和多个第二毫米波雷达,所述多个第一毫米波雷达均固定安装在车头的头部底端,所述前置摄像头固定安装在车头的顶部,所述多个第二毫米波雷达均固定安装在车身的尾部底端,所述后置摄像头固定安装在货厢的尾部顶端,所述系统控制模块与前置摄像头、后置摄像头、多个第一毫米波雷达和多个第二毫米波雷达均通过有线电信号连接。
6、通过采用上述技术方案,环境监控系统分成两组,前置摄像头和第一毫米波雷达为一组,后置摄像头和第二毫米波雷达为另一组,系统控制模块会对前置摄像头和后置摄像头的图像内容进行分析,与多个第一毫米波雷达和多个第二毫米波雷达采集到的数据进行对比,从而更加精确地掌握自身车道和相邻两车道上的车辆行驶状况,如果前后车辆有发生异常,如后方车辆高速接近且无减速迹象,或前方车辆突然急刹减速,系统控制模块会直接通过自动控制系统调节驱动电机,除此之外,相邻车道上的车辆如果突然变道导致可能发生碰撞,系统控制模块也会调节驱动电机的转速,以应对后续可能到来的碰撞,而当后续的碰撞来临后,电子稳定系统则会辅助货车保持平衡,避免发生侧翻,从而减少可能的人员伤亡、事故财产损失和后续的路面风险隐患等。
7、在进一步的实施例中,所述电子稳定系统包括陀螺仪、侧向加速度传感器、第一加速度计和第二加速度计,所述车身的顶部中间位置设置有容置槽,所述容置槽的左侧壁上固定安装有侧向加速度传感器,所述陀螺仪栓接固定在容置槽的内部,所述第一加速度计间隔设置在陀螺仪的左侧,所述第一加速度计与车身顶部固定连接,所述第二加速度计间隔设置在陀螺仪的右侧,所述第二加速度计与车身顶部固定连接,所述侧向加速度传感器固定安装在货厢的底部,所述车头底部的多个第一轮体的一侧均设置有第一车轮转速传感器和第一车轮位移传感器,所述车身底部的多个第二轮体的一侧均设置有第二车轮转速传感器和第二车轮位移传感器。
8、通过采用上述技术方案,车轮转速传感器可以跟踪每一车轮的轮速,车轮位移传感器能够用来测量车轮和车身相对位置的变化,横摆角速度传感器可以记录汽车绕垂直线转动的所有运动,侧向加速度传感器则可以检测转向行驶时离心力的大小,陀螺仪能够便于系统控制模块测算车身的倾斜角,第一加速度计可以读取z轴的垂直加速度,而第二加速度计可以读取y轴的横向加速度,单纯的侧倾率数据不足以预测车辆是否侧翻,或者是否正处于一个将要侧翻的状态当中,因此需要使用第一加速度计读取垂直加速度,而第二加速度计读取的横向加速度能检测汽车是否发生侧滑,除此之外,用于容置陀螺仪的容置槽内还铺设有大量抑制振动的缓冲柔性垫层,以及陀螺仪本身也设置有防冲击的结构,能够确保在两车碰撞后陀螺仪仍然能够保持可靠的输出。
9、在进一步的实施例中,所述车身的左侧底端固定安装有保险杠,所述保险杠内设置有第一安全气囊,所述防撞装置包括第一支杆、第二支杆和弧形弯管,所述车身底部的右端前侧栓接固定有第一安装座,所述车身底部的右端后侧栓接固定有第二安装座,所述第一支杆的一端固定安装在第一安装座的安装槽内,所述第二支杆的一端固定安装在第二安装座的安装槽内,所述第一支杆远离第一安装座的一端通过弧形弯管与第二支杆远离第二安装座的一端固定连接,所述第一支杆、第二支杆和弧形弯管内均设置有第二安全气囊,多个所述第二安全气囊和多个所述第二安全气囊均与系统控制模块通过有线电信号连接。
10、通过采用上述技术方案,现行的gb11567.2-2017汽车和挂车后下部防护要求只针对商务车辆,且测试车速仅为32km/h,与高速路环境截然不同,因此,常规的防撞杆在高速行驶过程中后车无法控制车速并追尾时很难起作用,由于货车质量较大,高速行驶的小车在撞击到防撞杆后,梁状结构的防撞杆会立刻向上弯折,使小车随惯性进一步撞入货车的车底,整体呈弧形的防撞装置则能够极大增强小车从正后方撞入时的抗变形能力,而小车的冲击力会在这个过程中得到抵消,第一支杆和第二支杆的外圆弧一侧均设置有容置凹槽,容置凹槽内的安全气囊使得小车无论从哪个角度追尾,都有很大的可能受力并向外弹开,而非直接滑入到车底,大大提高了小车驾乘人员的生还率,同时系统控制模块中还有防撞装置的检验合格时间点,会在内部进行周期性的倒计时,一旦检验合格时间点接近,如前两个月到前两周之间,就会通过车头内的操作屏幕提醒卡车驾驶员前往相应的检查点进行检验,以确保防撞装置仍然能够正常运行,如果超出限定时间没有进行检验,则会通过系统控制模块远程锁定该车辆,这避免了现有的一些货车防撞杆年久失修、维护不佳的情况。
11、在进一步的实施例中,所述保险杠的左侧设置有多个第一碰撞传感器,所述第一碰撞传感器与第一安全气囊通过有线电信号连接,所述弧形弯管的后侧设置有多个第二碰撞传感器,所述第二碰撞传感器与第二安全气囊通过有线电信号连接。
12、通过采用上述技术方案,三段式的设计使周边设备(如摄像头、毫米波雷达等)在检测到有碰撞风险时,会首先打开弧形弯管内的第二安全气囊,充气完成后,弧形弯管内的第二安全气囊会阻隔在防撞装置与后车之间,弧形弯管内设置有独立的回收电机,如果碰撞没有发生,则回收电机会在第二安全气囊收缩后将其重新收卷到弧形弯管的内部,尽管此时的弧形弯管内部的第二安全气囊已经无法触发,但是可以对其进行回收,避免浪费,第一支杆和第二支杆内的第二安全气囊均与碰撞传感器相连,当碰撞传感器传来信号,第一支杆和第二支杆内的第二安全气囊会在瞬间打开,尽管撞击过程中后车的撞击方向是不可预计的,但是当防撞装置受力变形后,后车的车头靠近半挂车的车身尾部时,打开的多个第二安全气囊总能起到作用,并利用打开瞬间产生的冲击力进一步减缓小车撞击时受到的伤害。
13、在进一步的实施例中,所述车身的底部设置有主动液压悬挂系统,所述主动液压悬挂系统包括液压油箱、变量泵、伺服阀和悬挂油缸,所述液压油箱固定安装在车身底部的一侧,所述变量泵的吸油口通过第一输油管与液压油箱连通,所述变量泵的出油口通过第二输油管与伺服阀的第一进口连通,所述第二输油管上设置有单向阀,所述变量泵的第一出口与悬挂油缸的无杆腔连接,所述变量泵的第二出口与悬挂油缸的有杆腔连接,所述悬挂油缸的顶部栓接固定在车身的底部。
14、通过采用上述技术方案,主动悬挂系统和被动悬挂系统的最大区别就是,主动悬挂系统可以根据当前的路段自动调节车辆的减震器阻尼,但是如果主动悬挂系统长期保持高压状态,当系统压力超过溢流阀压力时,大量液压油就会经由溢流阀流回油箱,长期在这种状态下工作,会导致驱动电机的功率大幅度消耗,损害其工作寿命,因此将主动悬挂系统和周边设备(如摄像头、毫米波雷达等)建立联动配合,在行驶中检测到有车辆快速接近之后,再通过系统控制模块控制变量泵快速调节减震器阻尼,大幅度增加系统压力,从而使短时间内货厢获得更大的避震效果,从而使货车在碰撞的过程中更不易产生侧翻。
15、在进一步的实施例中,所述单向阀与伺服阀之间设置有蓄能器,所述蓄能器的内部设置有油压传感器,所述油压传感器与系统控制模块通过有线电信号连接。
16、通过采用上述技术方案,蓄能器可以储存或释放油液,蓄能器储存的油量和出口压力有关,因此需要使用油压传感器对其进行检测,可以在流量小范围波动时起到流量补偿作用,当检测到即将发生碰撞时,蓄能器也会在安全幅度内迅速释放油液,并且根据驱动电机的转速、当前车速等参数,配合轮速与制动力施加的情况来进行流量调整,起到在碰撞发生后减轻货厢摇晃幅度的效果。
17、在进一步的实施例中,步骤s1、检测车辆周边情况,用于通过前置摄像头检测车头前方120度角范围内所有物体与车头的头部保险杠之间的距离,并通过后置摄像头检测同车道内正后方车辆与车身的尾部保险杠之间的距离;
18、步骤s2、检测车辆周围移动目标,用于通过毫米波雷达扫描数据生成车头周缘与车头前方120度角范围内所有移动目标和车辆之间的距离,并生成车尾周缘和车尾后方120度角范围内所有移动目标和车辆之间的距离;
19、步骤s3,进行感知融合,用于将摄像头和毫米波雷达的数据进行关联,并基于深度学习的多传感器融合输出融合结果,将感知结果输出;
20、步骤s4,根据自身速度测量前方车辆和后方车辆的实时速度;
21、步骤s5,设定安全等级和与安全等级对应的保护措施。
22、通过采用上述技术方案,车辆前后设置的摄像头均拥有夜视功能,即使在夜晚也能较为清晰地感知到黑白画面的图像,而毫米波雷达则可以全天候生成相应的图像,不会被雨雪、云雾等气象因素影响,通过毫米波雷达和摄像头的感知融合,能够实现在提前辨别来车的情况下,进行精准的测距和测速,有效掌握移动目标的接近,及时发出碰撞预警并进行相应的措施。
23、在进一步的实施例中,所述步骤s5的具体步骤如下;s51,判断当前车辆的车轮数量,如果车头的规格为8x2,则应用第一安全等级,系统控制模块根据驱动电机的实际转速与目标转速a进行对比,如果实际转速大于目标转速a,则通过调整电压使实际转速降低至目标转速a;
24、s52,判断当前车辆的车轮数量,如果车头的规格为6x4,则应用第二安全等级,系统控制模块根据驱动电机的实际转速与目标转速b进行对比,如果实际转速大于目标转速b,则通过调整电压使实际转速降低至目标转速b;
25、s53,判断当前车辆的车轮数量,如果车头的规格为4x2,则应用第二安全等级,系统控制模块根据驱动电机的实际转速与目标转速c进行对比,如果实际转速大于目标转速c,则通过调整电压使实际转速降低至目标转速c。
26、通过采用上述技术方案,根据同一系列车型的不同配置,适用于不同安全等级和安全措施,车辆的车轮数量是提前设置好的,不需要临时判断,不同的车轮数量会影响车辆的总体载重,同时也会导致车辆的质心发生一定的变化,因此需要根据不同的车轮数量,进行不同的降速和施加制动力。
27、综上所述,本发明具有以下有益效果:
28、1.通过电子稳定系统的设置,能够在多个传感器的联动配合下,清晰掌握车辆的行驶方向、转弯大小、是否与驾驶员期望的转弯方向与角度一致,以及转弯的过程是否可能引起侧翻风险等,在碰撞发生前,电子稳定系统就会得到系统控制模块的预警,系统控制模块通过环境监控系统感知周围车辆的行驶速度和方向,从而判断碰撞风险,在碰撞还未发生时,就通过系统控制模块进行提前的减速,并且计算碰撞可能发生的位置,以及车辆在受到碰撞的冲击后货厢会倾斜的方向,然后在碰撞发生后,通过车轮转速传感器跟踪每个车轮的转速,通过第一加速度计和第二加速度计读取垂直加速度和横向加速度,判断在碰撞发生后车辆是否处于侧翻或将要侧翻的状态,从而配合系统控制模块对单独的轮子施加制动力,控制车身状态,起到在撞击发生后避免侧翻的效果;
29、2.通过主动悬挂系统的设置,能够由蓄能器和变量泵相互配合,正常行驶过程中通过蓄能器进行流量补偿,从而避免主动悬挂系统长期保持高压状态,影响驱动电机的工作寿命,而变量泵则能够与摄像头和毫米波雷达配合,通过提前加大流量来提高阻尼器的减震功能,在撞击发生后,起到消弭撞击造成的车身摇晃影响,大大提高安全性的效果;
30、3.通过防撞装置的设置,能够借助第一支杆、第二支杆和弧形弯管内安装安全气囊进一步提高对后车的保护能力,第一支杆和第二支杆本身也带有一定的弧度,与弧形弯管一起组成了一个圆弧,圆弧状的防撞杆能够有效避免后车撞向货厢两侧时,后车其中一侧驾驶室与货厢发生严重碰撞的情况,并且还能够使小车向另一边偏斜,而当后车直接撞至弧形弯管的中心点或靠近中心点的位置,弧形弯管内提前弹出的第二安全气囊,以及第一支杆与第二支杆提供的支撑都能减缓后车受到的冲击,起到保护后车生命安全,有效降低了追尾事故死亡率的效果。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342853.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表