车辆控制方法、装置、存储介质及电子设备与流程
- 国知局
- 2024-12-06 12:42:07
本技术涉及车辆控制,具体涉及一种车辆控制方法、装置、存储介质及电子设备。
背景技术:
1、自适应巡航控制(acc,adaptive cruise control)是自动驾驶汽车交通流研究中一类重要的纵向跟驰技术,自适应巡航控制的车辆可通过车载检测设备与车车通信技术实时获取前车行驶数据,从而进行跟车巡航。
2、目前,自适应巡航控制的方案存在经典的比例、积分和微分(pid,proportionintegral differential)控制、线性二次型(lq,linear quadratic)最佳控制、线性二次高斯(lqg,linear quadratic gaussian)最佳控制、模糊控制、神经网络控制等。
3、但是,目前的自适应巡航控制方案,在跟车巡航中会出现响应慢、跟车慢的问题,容易在跟车巡航时发生车辆追尾事故。
技术实现思路
1、本技术实施例提供一种车辆控制方案,可以实现在指定时间内达到稳定跟车巡航目标,提升跟车巡航的响应速度和跟车速度,提升跟车巡航安全性。
2、本技术实施例提供以下技术方案:
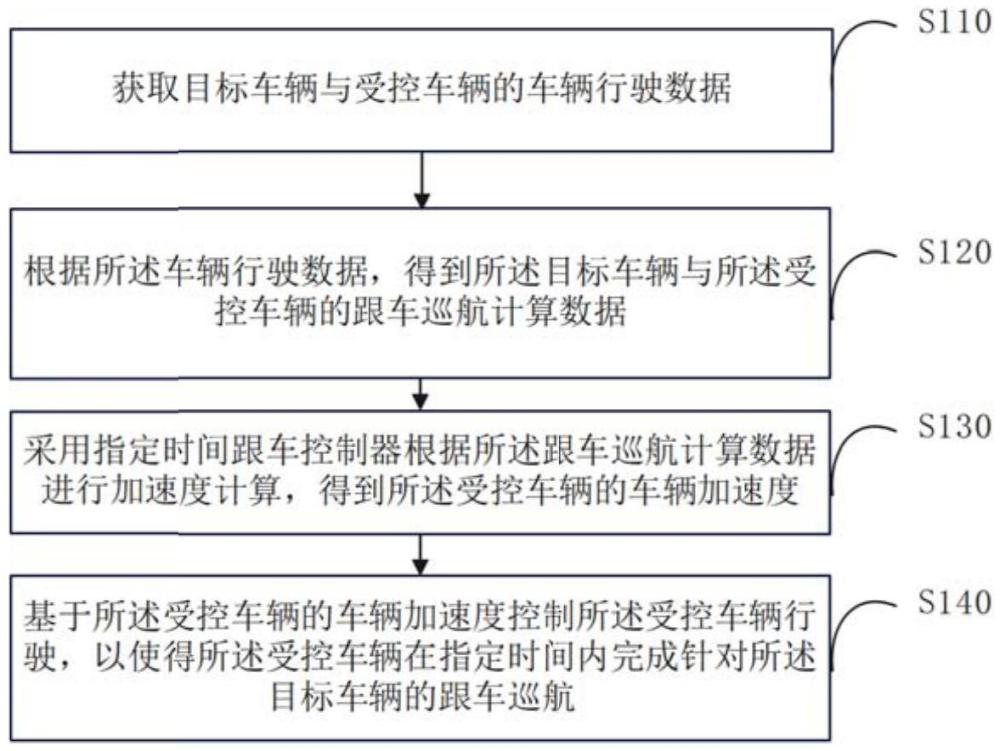
3、根据本技术的一个实施例,一种车辆控制方法,其包括:获取目标车辆与受控车辆的车辆行驶数据;根据所述车辆行驶数据,得到所述目标车辆与所述受控车辆的跟车巡航计算数据;采用指定时间跟车控制器根据所述跟车巡航计算数据进行加速度计算,得到所述受控车辆的车辆加速度;基于所述受控车辆的车辆加速度控制所述受控车辆行驶,以使得所述受控车辆在指定时间内完成针对所述目标车辆的跟车巡航。
4、在本技术的一些实施例中,所述跟车巡航计算数据包括所述目标车辆与所述受控车辆之间的相对行驶数据、所述目标车辆的车辆加速度以及所述受控车辆实现跟车巡航的指定时间;所述采用指定时间跟车控制器根据所述跟车巡航计算数据进行加速度计算,得到所述受控车辆的车辆加速度,包括:根据所述相对行驶数据、所述目标车辆的车辆加速度以及所述指定时间进行计算,得到所述受控车辆的车辆加速度。
5、在本技术的一些实施例中,所述相对行驶数据包括所述目标车辆与所述受控车辆之间的相对车速、相对车距误差、期望车间时距;所述根据所述相对行驶数据、所述目标车辆的车辆加速度以及所述指定时间进行计算,得到所述受控车辆的车辆加速度,包括:根据所述相对车距误差和所述指定时间进行计算,得到车距参考变量;根据所述相对车速、所述目标车辆的车辆加速度、所述期望车间时距以及所述车距参考变量进行计算,得到车速参考变量;根据所述目标车辆的车辆加速度、所述期望车间时距、所述相对车距误差、所述车距参考变量以及所述车速参考变量进行计算,得到所述受控车辆的车辆加速度。
6、在本技术的一些实施例中,所述根据所述相对车距误差和所述指定时间进行计算,得到车距参考变量,包括:根据公式计算得到所述车距参考变量,其中,ψ1表示所述车距参考变量,ex表示所述相对车距误差,tf表示所述指定时间,t指示实际时间,η1为可调参数且η1≥1。
7、在本技术的一些实施例中,所述根据所述相对车速、所述目标车辆的车辆加速度、所述期望车间时距以及所述车距参考变量进行计算,得到车速参考变量,包括:根据公式及z2=ev+thaf+ψ1计算得到所述车距参考变量,其中,ψ2表示所述车速参考变量,ev表示所述相对车速,af表示所述目标车辆的车辆加速度,th表示所述期望车间时距,ψ1表示所述车距参考变量,tf表示所述指定时间,t指示实际时间。
8、在本技术的一些实施例中,所述根据所述目标车辆的车辆加速度、所述期望车间时距、所述相对车距误差、所述车距参考变量以及所述车速参考变量进行计算,得到所述受控车辆的车辆加速度,包括:
9、根据公式计算得到所述受控车辆的车辆加速度,其中,ah为所述受控车辆的车辆加速度,af表示所述目标车辆的车辆加速度,th表示所述期望车间时距,ψ1表示所述车距参考变量,ex表示所述相对车距误差,ψ2表示所述车速参考变量,tf表示所述指定时间,t指示实际时间,为相对车距误差对时间的导数。
10、在本技术的一些实施例中,所述跟车巡航计算数据包括所述目标车辆与所述受控车辆之间的相对行驶数据,所述相对行驶数据包括所述目标车辆与所述受控车辆之间的相对车距误差;所述根据所述车辆行驶数据,得到所述目标车辆与所述受控车辆的跟车巡航计算数据,包括:根据公式ex=ddes-dr及ddes=thvf+d0计算得到所述相对车距误差,其中,ex表示所述相对车距误差,ddes表示期望车距,th表示所述期望车间时距,d0表示两车都停止后的安全车间距,dr表示所述目标车辆与所述受控车辆之间的实际车距,vf表示所述目标车辆的车速。
11、在本技术的一些实施例中,在所述获取目标车辆与受控车辆的车辆行驶数据之前,所述方法还包括:针对所述受控车辆开启自适应巡航的定速巡航;监测所述受控车辆的前方是否存在所述目标车辆在行驶且所述目标车辆的行驶速度是否小于所述受控车辆设定的定速巡航目标速度;若是,则将所述定速巡航切换为跟车巡航。
12、根据本技术的一个实施例,一种车辆控制装置,所述装置包括:获取模块,用于获取目标车辆与受控车辆的车辆行驶数据;预处理模块,用于根据所述车辆行驶数据,得到所述目标车辆与所述受控车辆的跟车巡航计算数据;计算模块,用于采用指定时间跟车控制器根据所述跟车巡航计算数据进行加速度计算,得到所述受控车辆的车辆加速度;控制模块,用于基于所述受控车辆的车辆加速度控制所述受控车辆行驶,以使得所述受控车辆在指定时间内完成针对所述目标车辆的跟车巡航。
13、在本技术的一些实施例中,所述跟车巡航计算数据包括所述目标车辆与所述受控车辆之间的相对行驶数据、所述目标车辆的车辆加速度以及所述受控车辆实现跟车巡航的指定时间;所述计算模块,用于:根据所述相对行驶数据、所述目标车辆的车辆加速度以及所述指定时间进行计算,得到所述受控车辆的车辆加速度。
14、在本技术的一些实施例中,所述相对行驶数据包括所述目标车辆与所述受控车辆之间的相对车速、相对车距误差、期望车间时距;所述计算模块,用于:根据所述相对车距误差和所述指定时间进行计算,得到车距参考变量;根据所述相对车速、所述目标车辆的车辆加速度、所述期望车间时距以及所述车距参考变量进行计算,得到车速参考变量;根据所述目标车辆的车辆加速度、所述期望车间时距、所述相对车距误差、所述车距参考变量以及所述车速参考变量进行计算,得到所述受控车辆的车辆加速度。
15、在本技术的一些实施例中,所述计算模块,用于:根据公式计算得到所述车距参考变量,其中,ψ1表示所述车距参考变量,ex表示所述相对车距误差,tf表示所述指定时间,t指示实际时间,η1为可调参数且η1≥1。
16、在本技术的一些实施例中,所述计算模块,用于:根据公式及z2=ev+thaf+ψ1计算得到所述车距参考变量,其中,ψ2表示所述车速参考变量,ev表示所述相对车速,af表示所述目标车辆的车辆加速度,th表示所述期望车间时距,ψ1表示所述车距参考变量,tf表示所述指定时间,t指示实际时间。
17、在本技术的一些实施例中,所述计算模块,用于:
18、根据公式计算得到所述受控车辆的车辆加速度,其中,ah为所述受控车辆的车辆加速度,af表示所述目标车辆的车辆加速度,th表示所述期望车间时距,ψ1表示所述车距参考变量,ex表示所述相对车距误差,ψ2表示所述车速参考变量,tf表示所述指定时间,t指示实际时间,为相对车距误差对时间的导数。
19、在本技术的一些实施例中,所述跟车巡航计算数据包括所述目标车辆与所述受控车辆之间的相对行驶数据,所述相对行驶数据包括所述目标车辆与所述受控车辆之间的相对车距误差;所述预处理模块,用于:根据公式ex=ddes-dr及ddes=thvf+d0计算得到所述相对车距误差,其中,ex表示所述相对车距误差,ddes表示期望车距,th表示所述期望车间时距,d0表示两车都停止后的安全车间距,dr表示所述目标车辆与所述受控车辆之间的实际车距,vf表示所述目标车辆的车速。
20、根据本技术的另一实施例,一种存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行本技术实施例所述的方法。
21、根据本技术的另一实施例,一种电子设备可以包括:存储器,存储有计算机程序;处理器,读取存储器存储的计算机程序,以执行本技术实施例所述的方法。
22、根据本技术的另一实施例,一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行本技术实施例所述的各种可选实现方式中提供的方法。
23、本技术实施例中,获取目标车辆与受控车辆的车辆行驶数据;根据所述车辆行驶数据,得到所述目标车辆与所述受控车辆的跟车巡航计算数据;采用指定时间跟车控制器根据所述跟车巡航计算数据进行加速度计算,得到所述受控车辆的车辆加速度;基于所述受控车辆的车辆加速度控制所述受控车辆行驶,以使得所述受控车辆在指定时间内完成针对所述目标车辆的跟车巡航。
24、以这种方式,根据目标车辆与受控车辆的车辆行驶数据,得到目标车辆与受控车辆的跟车巡航计算数据后,将跟车巡航计算数据输入指定时间跟车控制器,得到指定时间跟车控制器输出的车辆加速度,基于该车辆加速度控制受控车辆行驶,可以使得受控车辆在指定时间内完成针对目标车辆的跟车巡航,可以实现在指定时间内达到稳定跟车巡航目标,提升跟车巡航的响应速度和跟车速度,提升跟车巡航安全性。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342570.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。