多向超声键合方法和系统与流程
- 国知局
- 2025-01-10 13:26:19
本申请实施例涉及半导体加工,尤其是多向超声键合方法和系统。
背景技术:
1、引线键合是半导体封装加工流程中的重要工序,其原理是通过引线键合设备将金属细线的两端分别键合在芯片焊盘和支架引脚上,从而实现芯片与支架的信号导通。在键合时,通过引线键合设备的键合工具上的换能器输出超声波,并施加一定压力,使金属细线与芯片焊盘紧密接触并进行振动摩擦,在高温和时间的作用下,达到金属细线与芯片焊盘的键合连接。
2、在现有的技术中,引线键合设备键合头输出的超声波振动方向通常只有单一的y方向,即前后振动。对于多样化的封装产品来说,单一方向的超声波振动键合存在极大的局限性,如图1所示,在芯片焊盘a上焊点a1进行单一的y方向超声振动不利于球形的控制,加大超声容易出现椭圆球或者偏心球等不良,如遇到芯片焊盘a为铝电极a2时,y方向的超声波振动键合会导致y方向的挤铝严重,降低键合的可靠性,如果芯片的铝层很薄,y方向挤铝严重还会导致弹坑问题,即铝层下面的镀层出现破损,造成芯片失效,而且挤铝太多会误碰pn线a3导致芯片短路;而对于引线支架b的焊点b1进行单一的y方向超声振动,遇到打线方向为y方向时,如图2所示,y方向的超声波振动会导致在键合焊点b1时,焊点b1展不开,宽度不足,降低了键合可靠性;如遇到非水平拉线的打线方向时,y方向的超声波振动会导致在键合焊点b2时,出现焊点不良、外观不对称,降低了键合可靠性。
3、在现有技术中,为了弥补单一y方向超声振动带来的上述局限性,采取了一种研磨的方式来辅助超声振动,即在超声输出的同时通过传统的xy平台直线电机进行小幅度的移动来增强键合,由于xy平台的负载大,运动惯量大,所以这种研磨频率由于结构限制一般不超过250hz,与超声频率相差较远,因此研磨工艺耗费时间较长,开启研磨功能后,整个键合时间至少比原来增加一倍,大幅度降低了机器的键合效率。
技术实现思路
1、第一方面,本申请的实施例提供一种能够解决现有的引线键合设备仅能进行y方向上单一方向的超声振动以及结合研磨方式均存在的键合可靠性缺陷和键合效率低的多向超声键合方法。
2、该方法包括如下步骤:
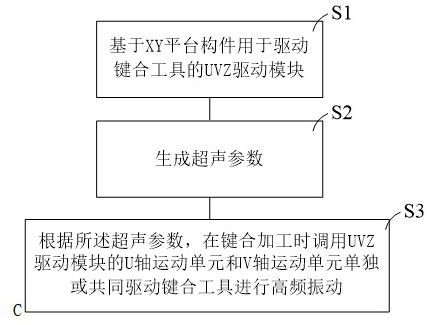
3、基于xy平台构建用于驱动键合工具的uvz驱动模块,所述uvz驱动模块至少包括进行高频运动的u轴运动单元和v轴运动单元;
4、生成超声参数,所述的超声参数中包括超声路径;
5、根据所述超声参数,在键合加工时调用uvz驱动模块的u轴运动单元和v轴运动单元单独或共同驱动键合工具进行高频振动。
6、由于采用了上述方法,通过对u轴运动单元和v轴运动单元的单独控制,可以实现驱动键合工具的单方向上的高频振动,还可以通过对u轴运动单元和v轴运动单元的运动振幅和相角差的控制来实现驱动键合工具在振动范围内的任意方向和任意路径的高频振动,将传统键合面上的一维超声振动拓展为二维矢量超声振动,极大地拓展了键合工艺开发的丰富性,对键合质量和键合效率带来了极大提升。
7、在一种可能的实现方式中,所述uvz驱动模块包括:
8、u轴运动单元,包括u轴音圈电机和u轴主体,所述u轴音圈电机包括u轴定子和u轴动子,所述u轴动子相对于所述u轴定子在u轴方向水平运动,所述u轴定子设于所述安装座上,所述u轴动子与所述u轴主体连接;
9、v轴运动单元,包括v轴音圈电机和v轴主体,所述v轴音圈电机包括v轴定子和v轴动子,所述v轴动子相对于所述v轴定子在v轴方向水平运动,所述v轴定子设于所述安装座上,所述v轴动子与所述v轴主体连接;
10、所述u轴运动单元、v轴运动单元通过机械解耦或电磁解耦的方式进行单独运动或同时运动。
11、在一种可能的实现方式中,所述uvz驱动模块还包括:
12、z轴运动单元,包括z轴音圈电机和z轴主体,所述z轴音圈电机包括z轴定子和z轴动子,所述z轴动子相对于z轴定子在z轴方向垂直运动,所述z轴动子与所述z轴主体连接;
13、所述键合工具安装于所述z轴主体上。
14、在一种可能的实现方式中,所述生成超声参数步骤进一步包括:
15、生成芯片焊盘的超声路径和生成引脚支架的超声路径。
16、在一种可能的实现方式中,所述生成芯片焊盘的超声方向为控制所述u轴运动单元和v轴运动单元同时工作进行圆形路径上的高频振动。
17、在一种可能的实现方式中,所述生成引脚支架的超声方向进一步包括:
18、生成键合加工的行线方向;
19、获取焊点处引线键合的行线方向,生成垂直于所述行线方向的超声振动路径;
20、当行线方向平行于u轴或v轴方向时,控制所述u轴运动单元和v轴运动单元解耦工作进行垂直于行线方向路径上的高频振动;
21、当行线方向倾斜于u轴或v轴方向时,控制所述u轴运动单元和v轴运动单元同时工作进行垂直于行线方向路径上的高频振动。
22、第二方面,本申请的实施例还提供一种多向超声键合系统,该系统包括:
23、uvz驱动模块,所述uvz驱动模块至少包括进行高频运动的u轴运动单元和v轴运动单元;
24、超声参数生成模块,用于生成超声参数;
25、超声执行控制模块,根据超声参数生成模块生成的超声参数,控制所述在键合加工时调用uvz驱动模块的u轴运动单元和v轴运动单元单独或共同驱动键合工具进行高频振动。
26、在一种可能的实现方式中,所述超声参数生成模块包括芯片焊盘的超声方向生成单元和引脚支架的超声方向生成单元。
27、在一种可能的实现方式中,所述超声执行控制模块包括u轴运动控制单元和v轴运动控制单元,u轴运动控制单元和v轴运动控制单元控制所述u轴运动单元和v轴运动单元分别单独工作或同时工作以执行超声指令。
技术特征:1.多向超声键合方法,其特征在于,包括如下步骤:
2.如权利要求1所述的多向超声键合方法,其特征在于,所述uvz驱动模块包括:
3.如权利要求2所述的多向超声键合方法,其特征在于,所述uvz驱动模块还包括:
4.如权利要求1-3中任一项所述的多向超声键合方法,其特征在于,所述生成超声参数步骤进一步包括:
5.如权利要求4所述的多向超声键合方法,其特征在于,所述生成芯片焊盘的超声方向为控制所述u轴运动单元和v轴运动单元同时工作进行圆形路径上的高频振动。
6.如权利要求5所述的多向超声键合方法,其特征在于,所述生成引脚支架的超声方向进一步包括:
7.多向超声键合系统,该系统包括:
8.如权利要求7所述的多向超声键合方法,其特征在于,所述超声参数生成模块包括芯片焊盘的超声方向生成单元和引脚支架的超声方向生成单元。
9.如权利要求7所述的多向超声键合方法,其特征在于,所述超声执行控制模块包括u轴运动控制单元和v轴运动控制单元,u轴运动控制单元和v轴运动控制单元控制所述u轴运动单元和v轴运动单元分别单独工作或同时工作以执行超声指令。
技术总结本申请的实施例涉及半导体加工技术领域,尤其是多向超声键合方法和系统。该方法和系统包括和执行如下步骤:基于XY平台构建用于驱动键合工具的UVZ驱动模块,所述UVZ驱动模块至少包括进行高频运动的U轴运动单元和V轴运动单元;生成超声参数;根据所述超声参数,在键合加工时调用UVZ驱动模块的U轴运动单元和V轴运动单元单独或共同驱动键合工具进行高频振动。实现驱动键合工具的单方向上的高频振动,还可以通过对U轴运动单元和V轴运动单元的运动振幅和相角差的控制来实现驱动键合工具在振动范围内的任意方向和任意路径的高频振动,将传统的一维超声振动拓展为二维矢量超声振动,对键合质量和键合效率带来了极大提升。技术研发人员:程炜,姚坚雄,晏加宝受保护的技术使用者:深圳市德沃先进自动化有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/353140.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表