一种基于旋转涵道驱动器的可变形四旋翼三栖机器人
- 国知局
- 2025-01-10 13:36:59
本发明属于无人机,尤其涉及一种基于旋转涵道驱动器的可变形四旋翼三栖机器人。
背景技术:
1、在复杂地貌环境下执行侦察、搜救、巡检等有人装备难以快速抵达或接近的任务时,具备能够在地空水三种介质中机动的机器人是任务效能的核心。多旋翼无人机具备机动灵活、起降场地要求低的优点,但其续航时间短,适合快速机动和空中搜索;地面无人车噪音低、续航时间长,但机动速度慢、信号易受地貌遮蔽,适合长时间抵近侦察;水下潜航器能够在水下环境作业,但其部署速度慢、功能单一。为此,在复杂地貌环境执行上述任务时,经常需要多台套无人设备配合交替使用才能完全覆盖任务区域。为此,多个研发团队陆续开发能够跨介质机动的机器人系统。
2、如图1所示,由同济大学上海智能自主系统研究所和香港中文大学无人系统研究小组合作开发tj-flyingfish(同济飞鱼无人机)是一款具备空中及潜航机动的无人机。tj-flyingfish由一个中央圆顶机身和呈十字型对称分布的四条机臂组成,每个机臂的末端都设有一个推进装置。与普通四轴飞行器不一样的是,tj-flyingfish的每个推进装置里都包含有一个两档变速箱,安装它的机臂则可以相对于无人机的其余部分进行独立旋转。当无人飞行时,它的四个推进装置与螺旋桨都会朝向上方,并用两档转速中较高的一档来控制螺旋桨获得足够的升力进行起飞与盘旋,这点和普通四轴无人机的飞行方式没有任何区别。当降落到水面时这些推进装置就会朝下旋转180度,然后切换到低速挡旋转螺旋桨,将无人机拉到水面以下。tj-flyingfish虽然实现了空中和水下机动能力,但受限于冗余的结构设计和变速箱重量,其空中飞行时间仅为6分钟,重量高达1.63kg。
3、如图2所示,以色列heven无人机技术公司在isdef 2022上与战术地面机器人系统供应商roboteam联合开发推出了一个传统分体式两栖机器人解决方案,将空中多旋翼和无人地面车辆结合起来,用于陆上和空中任务。该方案可提高地面机器人和飞行机器人的工作效能。该方案允许空中无人系统与地面机器人系统集成在一起,向战场提供具有爆炸性军械处理能力的重要有效载荷。实现了在空中飞行和地面行驶的有机结合。这种分体协作式机器人虽然在一定程度上解决了陆空需求差异导致的机器人结构设计矛盾,但其结合与投放自动化程度低、传统分体式两栖机器人转换时间长、协作控制算法复杂,也导致其难以推广应用。
4、如图3所示,由波兰产品设计师witold mielniczek设计的x-tankcopter是一台左右两侧均带有履带的两栖四轴无人机。空中飞行状态时由四个空心杯电机驱动,履带并不转动;在地面行走状态时,两个履带转动控制行走速度和方向,四个空心杯电机不转动,可在地面快速爬行。但其动力系统重量冗余大,飞行和行走机构只有一套处于工作状态,导致其飞行时间只有12分钟。可见,跨介质机器人如何能够最大限度地平衡续航、速度与成本是一项艰巨的挑战。
5、通过上述分析,现有技术存在的问题及缺陷为:
6、(1)在保证具备良好跨介质机动能力的前提下,降低机器人动力系统及行走机构的冗余性和可靠性。因为空中飞行往往需要电机的高转速,而陆地低速行走时往往需要电机缓慢且精确的转角控制,这就导致传统的跨介质飞行器在不同介质机动时需要多套驱动系统以适应不同的速度区间。
7、(2)如何降低跨介质机动机器人状态转换时间。传统分体式两栖机器人需要冗长的分解和结合过程,而部分跨介质飞行器需要较长的入水准备时间。
8、(3)如何同时兼顾低成本、长续航和高机动能力。多套驱动系统和行走装置导致系统的冗余重量大,直接导致续航和机动性能差。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种基于旋转涵道驱动器的可变形四旋翼三栖机器人。
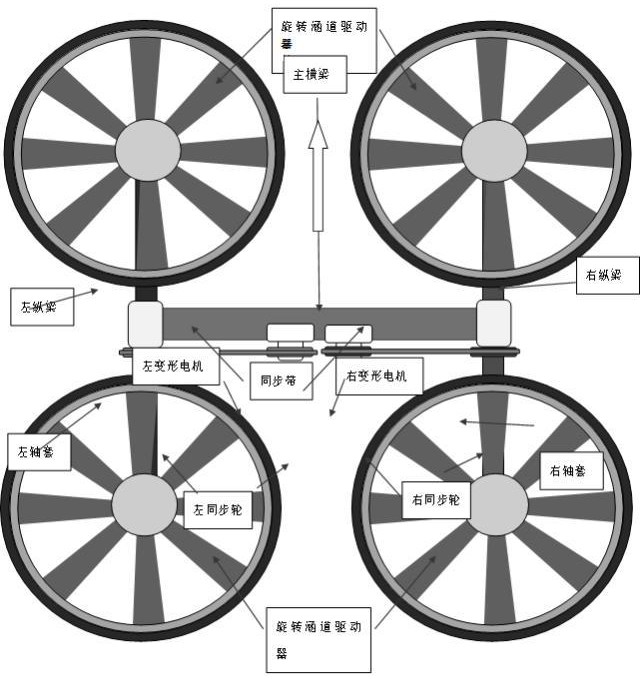
2、本发明是这样实现的,一种基于旋转涵道驱动器的可变形四旋翼三栖机器人,由机身、foc(field-oriented control,磁场定向控制)控制器、驱动电机、变形机构和旋转涵道驱动器组成;机架呈工字形布局,主要由左右纵梁和主横梁构成;其中左右纵梁分别通过左右轴承套固定在主横梁上,且能够绕纵轴轴向转动;左右纵梁的根部安装有同步带轮;变形电机安装在主横梁上,变形电机的转轴上安装有同步带轮;变形电机转轴上的同步带轮和左右纵梁上的同步带轮通过同步皮带连接在一起,且同步转动。
3、进一步,当左右变形电机转动时通过同步皮带带动左右纵梁一起向横梁中间内侧转动,实现机器人由空中飞行/潜航模式向地面行走模式的转换。
4、进一步,四个旋转涵道驱动器分别安装在左右纵梁两侧的安装座上;
5、进一步,旋转涵道驱动器由安装底座、电机、桨叶、涵道环和橡胶环组成,其中安装底座通过螺母固定在上述工字形机身上两根横梁的两端;电机通过螺母固定在上述安装底座上,电机旋转带动桨叶和涵道环转动,为机器人提供驱动力;其中foc控制器安装在电机和安装底座之间,通过经典的 foc算法来精确地控制电机的转速、转矩和转角;桨叶固定在电机转轴上,与电机轴同步旋转;飞行和潜航模式桨叶旋转时推动气流或水流来驱动机器人;涵道环与桨叶同心布置,固定在桨叶的外侧边缘上,起到保护桨叶和支撑橡胶环的作用,与桨叶同步转动;橡胶环与涵道环同心布置,固定在涵道环的外侧一面,与涵道环同步转动;地面模式时橡胶环接触地面起到轮胎的作用;
6、进一步,空中和潜航模式时四个旋转涵道驱动器向外侧展开后,其旋转面和机器人纵轴之间平行且夹角相同。飞行(潜航)模式时在foc控制器的控制下旋转涵道驱动器将高速(中低速)旋转,桨叶将推动气流(水流)指向机身正下方,精确控制四个旋转涵道驱动器的转速差来控制机器人的空中(水下)姿态;
7、进一步,地面行走模式时四个旋转涵道驱动器在变形电机的带动下向机身内侧折叠,折叠后其旋转面和机器人纵轴垂直,四个旋转涵道驱动器的橡胶环将接触地面。foc控制器控制旋转涵道驱动器低速旋转,通过外侧橡胶环与地面间的摩擦力推动机器人行走。精确控制四个旋转涵道驱动器的旋转角度和速度来控制机器人的地面行走速度和方向角。
8、本发明提供了一种基于旋转涵道驱动器的可变形四旋翼三栖机器人的使用方法,该方法包括以下步骤:
9、a. 通过foc控制器对四个旋转涵道驱动器进行精确控制,根据机器人所处的环境和任务需求,调整电机的转速、转矩和转角,以实现机器人的稳定飞行和潜航;
10、b. 当机器人需要从空中/潜航模式转换为地面行走模式时,启动变形电机,通过同步带轮带动左右纵梁一起转动,完成机器人的变形过程;
11、c. 在地面行走模式下,利用四个旋转涵道驱动器的橡胶环与地面的接触,实现机器人的移动,并根据需要对橡胶环的转速和方向进行调整,以控制机器人的行进方向和速度。
12、第一,本发明通过结构形变的方式使机器人具备了水下、地面和空中三栖机动能力,解决了在机器人在多介质中的快速机动转换问题,克服了传统分体式两栖机器人状态转换慢的缺点。
13、foc控制方式结合特殊设计的旋转涵道驱动器使同一套动力系统即可具备在地面、空中和水下的推进能力,解决了传统两栖机器人动力系统的冗余问题,大幅降低了系统重量,提高了系统续航时间。
14、第二,产品通过结构变形转换为空中\潜航、地面行走两种构型,具备空中、地面和潜航三种环境的机动能力,转换时间短、续航时间长。
15、驱动电机配合四个旋转涵道驱动器具备空中、水下和地面三种介质中的推动力,解决了上述背景技术中不同介质中机动需使用不同驱动机构的问题,大幅降低了重量和驱动系统冗余重量。在空中机动时,四个旋转涵道驱动器高速旋转,涵道桨叶起到了传统无人机桨叶的作用;水下机动时,四个旋转涵道驱动器中低速旋转,涵道桨叶起到了传统无人船螺旋桨的作用;地面运动时,四个旋转涵道驱动器低速旋转,橡胶环起到了传统无人车的车轮作用。
16、第三,本发明的技术方案转化后的预期收益和商业价值为:能够直接应用于小型慢速三栖无人机器人的设计和应用,技术方案成熟度高、成果转化门槛较低,可快速投入生产和行业应用。凭借其三栖机动能力、可靠的控制方法和成熟的生产工艺可在需要三栖机动能力的侦察与搜索任务中获得广泛的应用。
17、1、通过可变形结构解决了空/地/水下机动的一机多能问题,变形速度快,准备时间短,克服了背景技术中分体两栖机器人分解结合速度慢的难题;图4配合foc控制器一套动力系统即可为空/地/水下提供动力,动力系统利用率高、自重载荷小、续航时间长,克服了背景技术中两栖机器人在不同介质中需要不同动力系统导致的自重过大问题;
18、2、通过四个旋转涵道驱动器解决了不同介质的推进问题。高速旋转时涵道桨叶推动气流提供推力;中速时涵道外壳的橡胶层与地面接触的摩擦力提供推力;低速时涵道桨叶推动水流提供推力。克服了背景技术中两栖机器人在不同介质机动时需要不同推进系统的问题,进一步降低了自重;
19、3、foc控制器与四个旋转涵道驱动器配合解决了空/地/水下机动的姿态控制难题。首先foc控制器既能够保证电机的高速旋转,又能够精确地控制电机的力矩和转动角度,这使得四个旋转涵道驱动器既能高速旋转又能在低速转动时精确控制转角;其次,通过对四个旋转涵道驱动器转速的控制能够在空中和水下模式下精确地控制每个旋转涵道驱动器的转速,从而改变机器人的姿态。在地面模式下能够通过精确地控制每个旋转涵道驱动器的转动角度和转速,进而精确地控制机器人的前进方向和前进速度。
本文地址:https://www.jishuxx.com/zhuanli/20250110/354262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表