基于激光测距和路径规划的植保喷雾机器人及喷雾方法
- 国知局
- 2024-07-12 12:47:53
本发明属于农业植保设备,尤其涉及基于激光测距和路径规划的植保喷雾机器人及喷雾方法。
背景技术:
1、目前,国内外植保喷雾车大部分为适用于果园或菜园的植保喷雾机械分为自走式和无人机两种,其中自走式目前是针对高株作物或果树进行大范围喷施的非跨垄式底盘喷雾车,而无人机适用的作物和工作环境更加广泛,具有更多优势,包括作业效率高、节水节药、对人体危害性小、适应性广等特点。它可以在平原、丘陵、林地、湿地等多种地形中开展作业,同时不会像地面自走式机械一样,在作业过程中对作物产生损害。因此,对于需要在不同地形和气象条件下进行农事作业的区域来说,植保无人机是一种非常有前途和发展潜力的选择;但目前农业领域植保无人机还存在的问题:1)无人机价格偏高,造成农业生产普及率低;2)无人机可持续作业时间短,续航能力差,频繁更换电池不仅成本高,而且耽误作业时间;3)植保无人机载重小,大面积作业时需要频繁地更换药箱,直接影响到作业效率,从而影响到防治成本;4)操作难度大和无法进行大棚作业的弊端,难以适应不同垄距和植株高度的跨垄移动作业,喷雾穿透力和喷施范围都很有限。鉴于现有技术存在的问题,研究一种植保机器人用以有效解决大型自走式植保机无法在小垄距和大棚作业的技术问题,提高喷施效果具有很强的技术价值和经济价值。
技术实现思路
1、本发明的目的在于提供一种自适应斜拉索缆径攀爬除冰机器人,本发明的爬行除冰机器人能够适应不同直径和倾角的缆索且可进行径向自动调节与缆索的距离,达到更好除冰的效果。为了实现上述目的,发明采用以下技术效果:
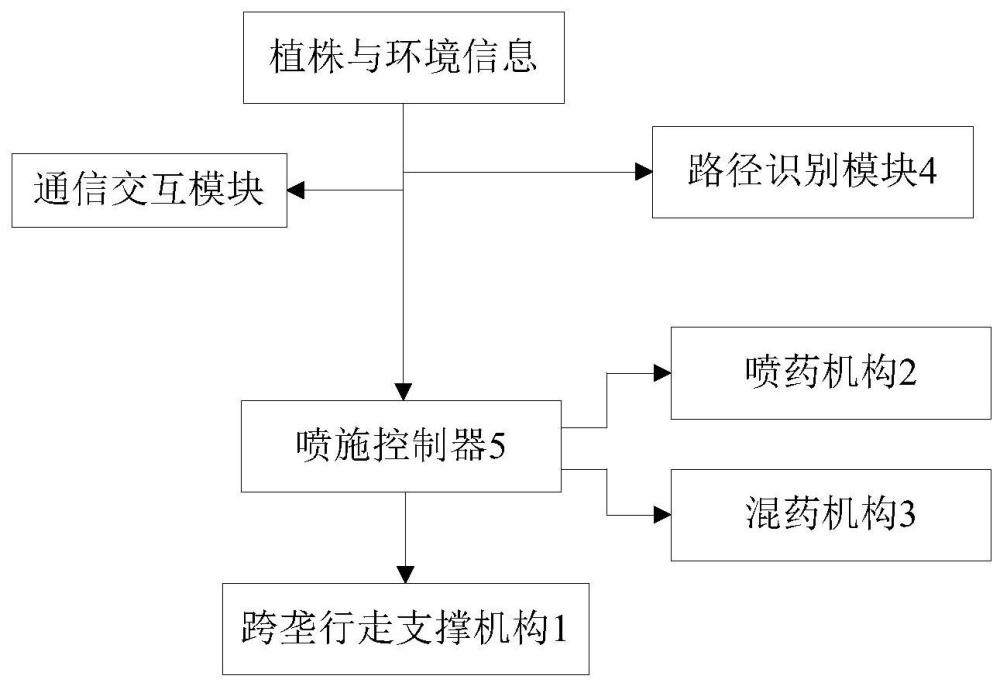
2、根据本发明的一个方面,本发明提供了基于激光测距和路径规划的植保喷雾机器人,包括跨垄行走支撑机构和设置于跨垄行走支撑机构上的喷药机构和路径识别模块,在跨垄行走支撑机构的顶端设置所述喷药机构,在喷药机构的上方设置有与喷药机构连通的储药机构,在储药机构上设置有喷施控制器,所述喷施控制器分别与跨垄行走支撑机构、喷药机构、储药机构和路径识别模块电气连接;所述路径识别模块包括位移传感器以及设置于跨垄行走支撑机构上的激光测距传感和视觉摄像头,所述位移传感器、激光测距传感和视觉摄像头分别通过数据与喷施控制器连通,所述喷药机构包括喷药箱体、设置在喷药箱体内部的喷施执行单元、设置在喷药箱体两侧的侧向喷雾模块以及设置在喷药箱体下侧的下喷雾模块,所述喷施控制器与所述喷施执行单元电气连接,所述喷药箱体分别通过喷施执行单元与所述侧向喷雾模块和下喷雾模块连通。
3、上述方案进一步优选的,所述跨垄行走支撑机构包括沿纵向方向相互平行的左行走底座和右行走底座,在左行走底座的前后两端设置有一对竖直平行的左升降气缸,在右行走底座的前后两端设置有一对与所述左升降气缸对应的竖直平行的右升降气缸,在一对竖直平行的左升降机构的顶端之间设置有左支撑梁,在一对竖直平行的右升降气缸的顶端之间设置有右支撑梁;在左支撑梁的后端与右支撑梁的后端之间分别横向设置有两条固定端部相互串接的后横向推动气缸,每条后横向推动气缸的输出轴分别对应铰接连接在左支撑梁后端的内侧壁和右支撑梁后端的内壁上;在左支撑梁的前端与右支撑梁的前端之间分别横向设置有两条固定端部相互串接的前横向推动气缸,每条前横向推动气缸的输出轴分别对应铰接连接在左支撑梁前端的内侧壁和右支撑梁前端的内壁上,后横向推动气缸与前横向推动气缸的上表面之间固定有支撑底板,在左行走底座的外侧和右行走底座的外侧分别设置所述激光测距传感,在支撑底板的前端中央设置所述视觉摄像头,所述左升降气缸、右升降气缸、后横向推动气缸和前横向推动气缸分别与所述喷施控制器电气连接。
4、上述方案进一步优选的,在所述左行走底座前后两端的底部分别设置左万向行走轮,在左行走底座的底端中部设置有左驱动轮,在右行走底座前后两端的底部分别设置右万向行走轮,在右行走底座的底端中部设置有右驱动轮,所述左驱动轮和右驱动轮分别通过对应的轮毂伺服电机安装于左行走底座上和右行走底座上,所述轮毂伺服电机与喷施控制器电气连接。
5、上述方案进一步优选的,所述储药机构包括存储箱体和设置在存储箱体内的蓄水箱和用于存储各种药液的多个临时储药盒,所述喷施控制器和位移传感器分别设置于存储箱体内,所述喷施执行单元包括设置在喷药箱体内的混药器、分支接头以及分别与侧向喷雾模块和下喷雾模块对应连通的储药箱,所述蓄水箱通过输水管与所述混药器的进水端口连通,每个储药盒的输出端依次通过药液输送分支管、药液输送总管与所述混药器的进药端口连通,所述混药器的出药口通过混药输液管与所述分支接头的输入口连通,该分支接头的分支输出口分别与对应连通的储药箱的输入端口连通。
6、上述方案进一步优选的,所述储药机构还包括设置在存储箱体内的第一电磁阀和第二电磁阀,所述喷施执行单元还包括设置在喷药箱体内且与喷施控制器电气连接的第一蠕动泵、第二蠕动泵、加压泵、第三电磁阀和第四电磁阀;在蓄水箱的输出端与混药器的进水端口之间的输水管上依次设置有第一电磁阀和第一蠕动泵,该第一蠕动泵的第一输出口与混药器的入水口连通,在混药器的进药端口一侧的药液输送总管上设置第二蠕动泵,在每个储药盒输出端的药液输送分支管上分别设置有第二电磁阀,所述混药器的进药端口通过药液输送总管与第二蠕动泵的出液端口连通,在第一电磁阀的输出端与第二蠕动泵的进液端口之间的药液输送总管上设置有第三电磁阀,在每个储药箱的输出端设置所述加压泵,所述每个加压泵的输出端分别通过对应的喷施管与侧向喷雾模块和下喷雾模块连通,在混药器的出药口一侧的混药输液管上设置所述第四电磁阀。
7、上述方案进一步优选的,在分支接头的分支输出口与对应连通的储药箱的输入口之间的分支管上设置有第三蠕动泵。
8、根据本发明的另一个方面,本发明提供了基于激光测距和路径规划的植保喷雾机器人的喷雾方法,所述喷雾方法包括如下步骤:
9、视觉摄像头扫描蔬菜喷施场地的地面信息,所述喷施控制器通过视觉摄像头获取蔬菜喷施场地地面信息,并将地面信息转换为静态地图,喷施控制器根据静态地图计算出蔬菜喷施场地的面积大小设定行设定比例混药;再根据蔬菜喷施场地的面积大小启动喷施执行单元的第一蠕动泵和第二蠕动泵向混药器内送入水和药液进行混药;
10、激光测距传感扫描机器人两侧蔬菜喷施场地障碍信息,所述喷施控制器通过激光测距传感获取种植场地的垄距和垄宽,根据种植场地的垄距、垄宽构建地面障碍信息,通过地面障碍信息规划出机器人在当前位置到目标喷施位置的最优路径;
11、根据最优路径计算出机器人的平面位移量,将蔬菜喷施场地进行网格划分并形成多个网格化面积,根据网格化面积计算出蔬菜喷施场地的喷施量;
12、将平面位移量转化成执行跨垄行走支撑机构、喷药机构和储药机构运行的电信号,调整所述跨垄行走支撑机构的横跨宽度和高度,然后启动喷施执行单元的加压泵将药液输送至侧向喷雾模块和下喷雾模块,机器人沿最优路径进行喷雾作业。
13、上述方案进一步优选的,通过地面障碍信息规划出机器人在当前位置到目标喷施位置的最优路径包括如下步骤:
14、根据地面障碍信息设定以机器人所在当前位置为起始点坐标、以目标喷施位置为终点坐标,在终点坐标周围预设若干个路径节点坐标;
15、在起始点坐标分别与终点坐标和路径节点坐标之间不断进行路径搜索,得到地面障碍的初搜路径,对初搜路径进行优化后添加一个膨胀层形成多个膨胀区域,在膨胀区域内识别出垄沟与起始点坐标之间的障碍物,获取垄沟与起始点坐标的安全距离和障碍路径节点;
16、将膨胀区域内中得到障碍物的障碍路径节点与起始点坐标依次连线,在安全距离范围内进行障碍物规避并重新规划当前路径,不断将当前路径更新上一次的初搜路径,以在安全距离范围内形成最终规划路线。
17、上述方案进一步优选的,机器人沿最优路径进行喷雾作业时通过位移传感器获取位移量,根据位移量调整侧向喷雾模块和下喷雾模块的喷雾大小。
18、发明采用了上述技术方案,发明具有以下技术效果:
19、(1)发明能够发适应不同垄距和植株高度进行自动调节跨垄行走机构,可有效解决大型植保喷雾机械难以进行较小垄距农田和大棚作业的问题,相比喷雾无人机,提升了载水量,成本更低,机器人在喷雾过程中可进行路径规划,使机器人沿路线进行自动喷雾作业,并利用蓝牙wifi一体模块搭建交互模块,实现操作者与机构的交互,使机构实时接收指令,提高智能化水平。
20、(2)本发明能够通过蠕动泵对药液进行精量控制液体流量,可进行不同药液自动进行设定比例混药,满足不同作业需要,,采用锥体卧式混药器,相比传统卧式圆柱体混药器混药更均匀;使用静电雾化喷头使液滴被叶面吸附并采用风送套筒对药液喷雾进行风送,增大穿透力和喷施范围。
本文地址:https://www.jishuxx.com/zhuanli/20240614/100968.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表