一种变刚度原理的测试验证机构的制作方法
- 国知局
- 2024-07-05 17:54:02
本发明属于机器人控制,具体涉及一种变刚度原理的测试验证机构。
背景技术:
1、对于人体穿戴外骨骼机器人来讲,若想实现人与外骨骼机器人在不同状态下的良好适配,需要实现机器人关节的柔顺动力输出。以提高机器人的运动性能与环境-机器-人的适用性。专利cn106426265a提供了一种通过改变弹簧预紧力实现变刚度的变刚度机构及柔性关节,其变刚度机构包括驱动轴、变刚度驱动盘、滑块、轴套、弹簧底座和弹簧。变刚度驱动盘输出端面均匀分布着三维轮廓曲线的t形槽,运动的滑块滚子在t形槽中沿曲线转动的同时沿轴向运动,从而使与弹簧底座固定连接的弹簧轴向运动,使弹簧的伸缩量发生改变,导致弹簧的预紧力改变来实现刚度的调节。在整个系统中变刚度结构与变刚度调节过程复杂。在后期使用和维护中,成本较大,需要将整套结构拆开进行维修,未能进行模块化设计,灵活方便性较差。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:如何提供一种变刚度原理的测试验证机构
3、(二)技术方案
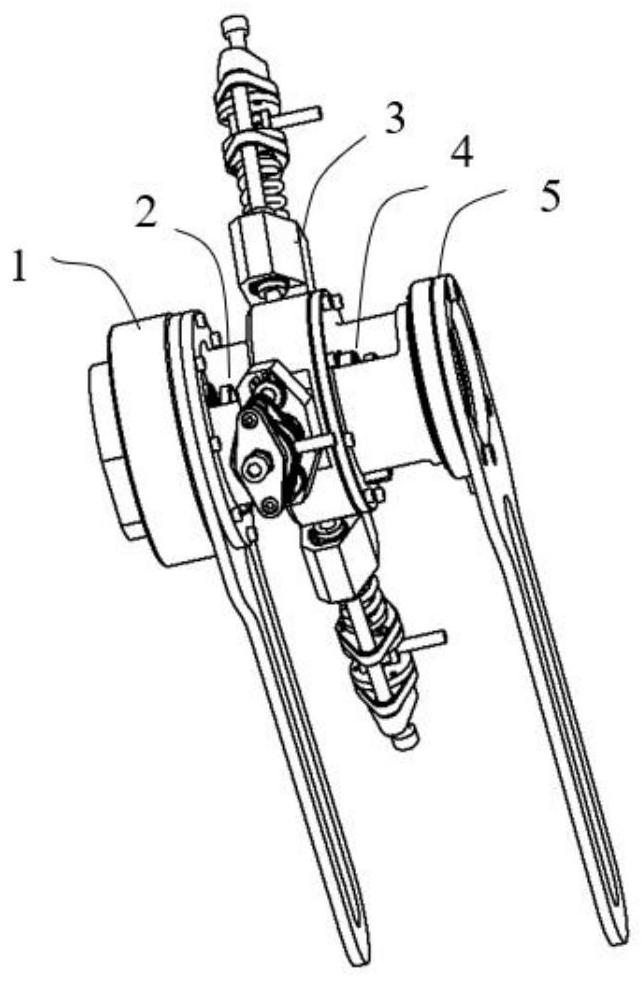
4、为了解决上述技术问题,本发明提供一种变刚度原理的测试验证机构,所述机构包括:动力发生单元(1)、动力传递变换单元(2)、输出刚度调节单元(3)、传感监测微系统(4)和固定支架(5);
5、所述动力发生单元(1)包括:直流电机(11)、固定摆杆(12)和sea安装件(13);
6、所述动力传递变换单元(2)包括:第一输出轴(21)、sea转接件(22)、第一轴承(23)、第一轴端限位花键(24)、轴承(25)、轴承固定环(26)、端面凸轮(27)、第二轴承(28)、第二轴端限位花键(29)、第二输出轴(210);
7、所述输出刚度调节单元(3)包括:调节螺钉(31)、锁紧螺母(32)、固定调节件(33)、第一传感器固定件(34)、拉压力传感器(35)、导向轴(36)、第二传感器固定件(37)、压缩弹簧(38)、挡圈(310)、导向支撑件(311)、滚动轴承(312);
8、所述传感监测微系统(4)包括:第一编码器转接板(41)、第一编码器安装板(42)、第一编码器接收器(43)、第一编码器码盘(44)、第二编码器转接板(45)、第二编码器安装板(46)、第二编码器码盘(47)、第二编码器接收器(48)、扭矩传感器(49)和50nm(50);
9、所述固定支架(5)包含摆动摆杆,用于输出转矩。
10、其中,所述动力发生单元(1)中直流电机(11)、固定摆杆(12)通过sea安装件(13)固定在一起,作为动力发生单元。
11、其中,所述动力传递变换单元(2)中第一输出轴(21)与动力发生单元(1)的直流电机(11)连接在一起,用于传递动力发生单元产生的动力;第一输出轴(21)通过第一轴承(23)与第一轴端限位花键(24)固定在一起,通过端面凸轮的运动变化规律实现动力变化输出,轴承(25)、轴承固定环(26)、端面凸轮(27)和sea转接件(22)固定在一起,作为动力变化单元,第二轴端限位花键(29)、第二轴承(28)和第二输出轴(210)固定在一起,通过第一轴端限位花键(24)、第二轴端限位花键(29)与端面凸轮(27)的刚性连接,实现第一输出轴(21)到第二输出轴(210)的动力传递。
12、其中,所述输出刚度调节单元(3)用于调节预压力,调节螺钉(31)能够在固定调节件(33)上自由调节改变压缩弹簧(38)的形变量,并利用锁紧螺母(32)锁定调节螺钉(31)的位置,通过改变压缩弹簧(38)的形变量;拉压力传感器(35)安装在第一传感器固定件(34)和第二传感器固定件(37)上,用于测量预紧力的大小,固定调节件(33)与第一传感器固定件(34)通过导向轴(36)、压缩弹簧(38)和导向支撑件(311)固定在一起,同时利用挡圈(310)在导向支撑件上(311)实现限位固定作用,导向支撑件(311)下端连接轴承(312)进入动力传递变换单元(2)内,并通过挤压端面凸轮(27)进行扭矩输出。
13、其中,所述传感监测微系统(4)的第一编码器转接板(41)、第一编码器安装板(42)、第一编码器接收器(43)与第一编码器码盘(44)固定在一起,安装在动力传递变换单元(2)的第一输出轴(21)上,用来测量初始输出量;第二编码器转接板(45)、第二编码器安装板(46)、第二编码器接收器(47)与第二编码器码盘(48)固定在一起,安装在动力传递变换单元(2)的第二输出轴(210)上,用于测量第二输出轴输出量;扭矩传感器(49)和50nm(50)与sea转接件(22)连接,并和固定支架(5)的摆动摆杆连接;,扭矩传感器49用来测量输出扭矩值。
14、其中,通过所述传感监测微系统(4)的测量方式,可以建立力-位状态反馈关系,建立映射曲线。
15、其中,所述固定支架(5)的摆动摆杆固定在传感监测微系统(4)上,用于输出经过系统变换的转矩。
16、其中,通过调节输出刚度调节单元的压缩弹簧的形变量,进而改变作用在动力传递变换单元部分中端面凸轮的预紧力,利用端面凸轮的运动规律,当直流电机启动时,通过动力传递变换单元最终传递出的转矩将呈现周期性变化,通过传感监测微系统建立力-位状态反馈,建立系统输入信号与目标刚度的映射曲线,从而实现可变刚度原理的验证与测试。
17、其中,通过调节变刚度机构的压缩弹簧的形变量,从而改变作用在端面凸轮的预压力,致使端面凸轮运动转矩随之产生变化,同时利用端面凸轮的运动特征,其运动转矩产生周期性变化。利用传感监测微系统实时监测,建立力-位状态反馈关系,形成系统输入与预设刚度的映射族群曲线,进而实现对目标刚度的测试与验证。
18、其中,所述机构运用了端面凸轮,利用凸轮的行程曲线的运动规律,将其作用的转矩实现周期变化;
19、所述机构通过调节变刚度单元的弹簧预压力实现变刚度,作为一个独立模块,安装在动力传递变换单元上,可实现变刚度调节,也可用于定刚度使用;作为为独立模块拆装方便,便于维护。
20、其中,所述机构提供了动力传递变换单元与传感监测微系统建立力-位状态反馈,建立系统输入信号与目标刚度的映射曲线,在变刚度控制中具有重要的意义。
21、(三)有益效果
22、与现有技术相比较,本发明具有以下有益效果:
23、本发明设计了端面凸轮,利用凸轮的行程曲线,实现运动过程的变换,第二输出轴实现周期性转矩输出,摆动摇杆变转矩输出。
24、本发明设计了传感器的力-位检测系统,得到系统输入与输出实时状态,可实现对目标刚度的测试与验证,形成系统输入信号与目标刚度的映射族群曲线。
25、本发明提供的一种通过调节变刚度机构的弹簧预压力实现变刚度作为一个独立模块,安装在动力传递变换单元上,可实现变刚度调节,也可用于定刚度使用。作为独立模块拆装方便,便于维护。
26、本发明结构机巧,体积、自重较小,可实现变刚度原理测试与验证。机构原理及控制框架亦可应用在机器人关节的柔顺控制。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49556.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。