机器人监视方法、机器人监视装置及机器人模型生成方法与流程
- 国知局
- 2024-07-05 17:54:01
本发明涉及机器人监视方法、机器人监视装置及机器人模型生成方法。
背景技术:
1、为了使机器人安全地动作,进行监视机器人的动作。例如,专利文献1所记载的装置使用dh表示法生成机器人模型,通过估计基于机械手结构的各臂的长度的差、各轴间的偏移量等静态参数,估计机器人的动作中的位置姿态来进行监视。
2、日本特开2017-164838号公报
3、但是,专利文献1那样的利用使用了dh表示法的机器人模型的正向运动学计算,需要根据机械手结构准备监视处理,存在不能对应机械手的结构不同的多个机器人,缺乏通用性的问题。
技术实现思路
1、本发明的机器人监视方法,其特征在于,具有:第一工序,使用兼用于具备具有m(m为2以上的整数)个臂以及与该臂对应的m个关节的第一机器人臂的第一机器人、具备具有n(n为整数且n<m)个臂以及与该臂对应的n个关节的第二机器人臂的第二机器人的机器人模型数据来生成机器人模型、
2、第二工序,基于在所述第一工序中生成的所述机器人模型,进行所述第一机器人或所述第二机器人的监视,
3、在所述第一工序中,
4、在监视对象为所述第一机器人的情况下,在所述机器人模型数据中,
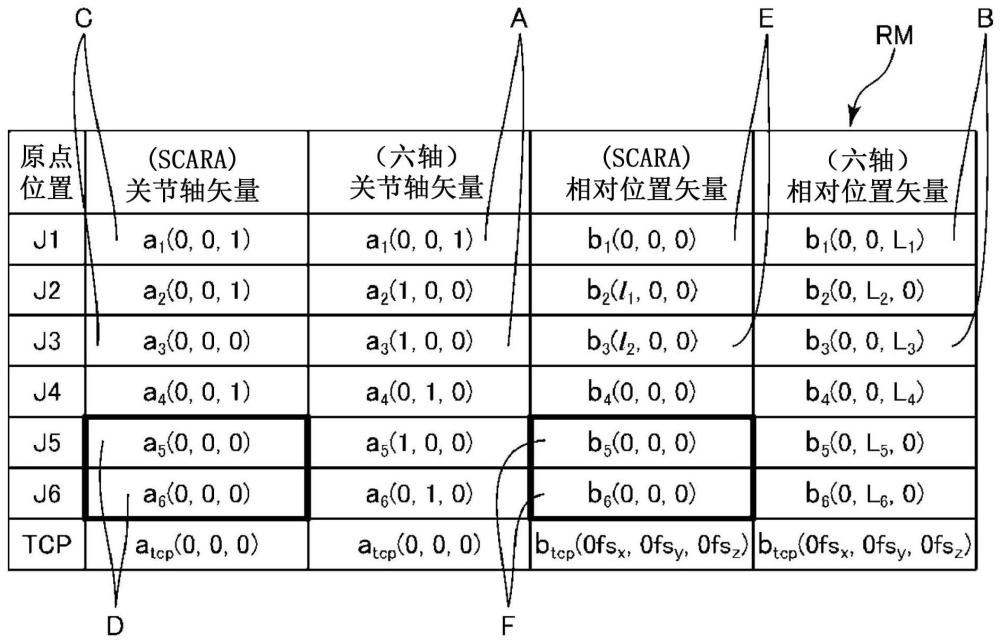
5、作为所述第一机器人的关节数据,对m个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的m个第一关节数据a,
6、作为所述第一机器人的臂数据,对m个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的第一臂数据b,
7、在监视对象为所述第二机器人的情况下,在所述机器人模型数据中,
8、作为所述第二机器人的关节数据,对n个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的n个第二关节数据c,并且分配由m-n个零矢量表示的第二关节数据d,
9、作为第二机器人的臂数据,对n个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的n个第二臂数据e,并且分配由m-n个零矢量表示的第二臂数据f。
10、本发明的机器人监视装置,其特征在于,具备:获取部,获取使用兼用于具备具有m(m为2以上的整数)个臂以及与该臂对应的m个关节的第一机器人臂的第一机器人、具备具有n(n为整数且n<m)个臂以及与该臂对应的n个关节的第二机器人臂的第二机器人的机器人模型数据来生成的机器人模型、
11、监视部,基于所述获取部获取的所述机器人模型进行所述第一机器人或所述第二机器人的监视,
12、所述机器人模型,
13、在监视对象为所述第一机器人的情况下,在所述机器人模型数据中,
14、作为所述第一机器人的关节数据,对m个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的m个第一关节数据a,
15、作为所述第一机器人的臂数据,对m个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的第一臂数据b,
16、在监视对象为所述第二机器人的情况下,在所述机器人模型数据中,
17、作为所述第二机器人的关节数据,对n个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的n个第二关节数据c,并且分配由m-n个零矢量表示的第二关节数据d,
18、作为第二机器人的臂数据,对n个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的n个第二臂数据e,并且分配由m-n个零矢量表示的第二臂数据f。
19、本发明的机器人模型生成方法,其特征在于,具有:第一工序,使用兼用于具备具有m(m为2以上的整数)个臂以及与该臂对应的m个关节的第一机器人臂的第一机器人、具备具有n(n为整数且n<m)个臂以及与该臂对应的n个关节的第二机器人臂的第二机器人的机器人模型数据来生成机器人模型,
20、在所述第一工序中,
21、在监视对象为所述第一机器人的情况下,在所述机器人模型数据中,
22、作为所述第一机器人的关节数据,对m个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的m个第一关节数据a,
23、作为所述第一机器人的臂数据,对m个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的第一臂数据b,
24、在监视对象为所述第二机器人的情况下,在所述机器人模型数据中,
25、作为所述第二机器人的关节数据,对n个所述关节分别分配由三维坐标表示所述关节的旋转轴的方向的矢量的n个第二关节数据c,并且分配由m-n个零矢量表示的第二关节数据d,
26、作为第二机器人的臂数据,对n个所述臂分别分配由三维坐标表示所述臂的长度以及方向的矢量的n个第二臂数据e,并且分配由m-n个零矢量表示的第二臂数据f。
技术特征:1.一种机器人监视方法,其特征在于,具有:
2.根据权利要求1所述的机器人监视方法,其特征在于,
3.一种机器人监视装置,其特征在于,具备:
4.一种机器人模型生成方法,其特征在于,具有:
技术总结本发明提供通用性优异的机器人监视方法、机器人监视装置及机器人模型生成方法。一种机器人监视方法,具有:第一工序,使用兼用于具备具有m个臂以及与该臂对应的m个关节的第一机器人臂的第一机器人、具备具有n个臂以及与该臂对应的n个关节的第二机器人臂的第二机器人的机器人模型数据来生成机器人模型、第二工序,基于在第一工序中生成的机器人模型,进行第一机器人或第二机器人的监视,m为2以上的整数,n为整数且n<m。技术研发人员:田边辉受保护的技术使用者:精工爱普生株式会社技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49555.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表