毛刺去除装置的制作方法
- 国知局
- 2024-07-08 10:52:24
本申请涉及毛刺去除,具体涉及一种毛刺去除装置。
背景技术:
1、在实际生产中,往往需要对工件上的毛刺进行去除,在对工件上的毛刺进行大面积去除后,工件上往往还存在有未被完全去除和去除不到的毛刺。目前,通常由人工对上述进行大面积去除毛刺后的工件进行复检,当工件上还存在未被完全去除和去除不到的毛刺时,人工使用不同类型的去毛刺的工具对工件进行适应性的毛刺去除作业。然而,由于毛刺类型、大小及位置的多变性,大大增加了人工的作业强度和毛刺的去除难度,即使通过机器人带动工具进行毛刺去除作业,也需要根据毛刺类型、大小及位置的不同而频繁地更换机器人上的去毛刺的工具,这些都大大增加了人工的作业强度,影响了生产效率。
技术实现思路
1、鉴于以上内容,有必要提出一种毛刺去除装置,实现根据不同类型的毛刺选择不同类型的工具进行毛刺去除作业,减轻人工的劳动强度,提升生产效率。
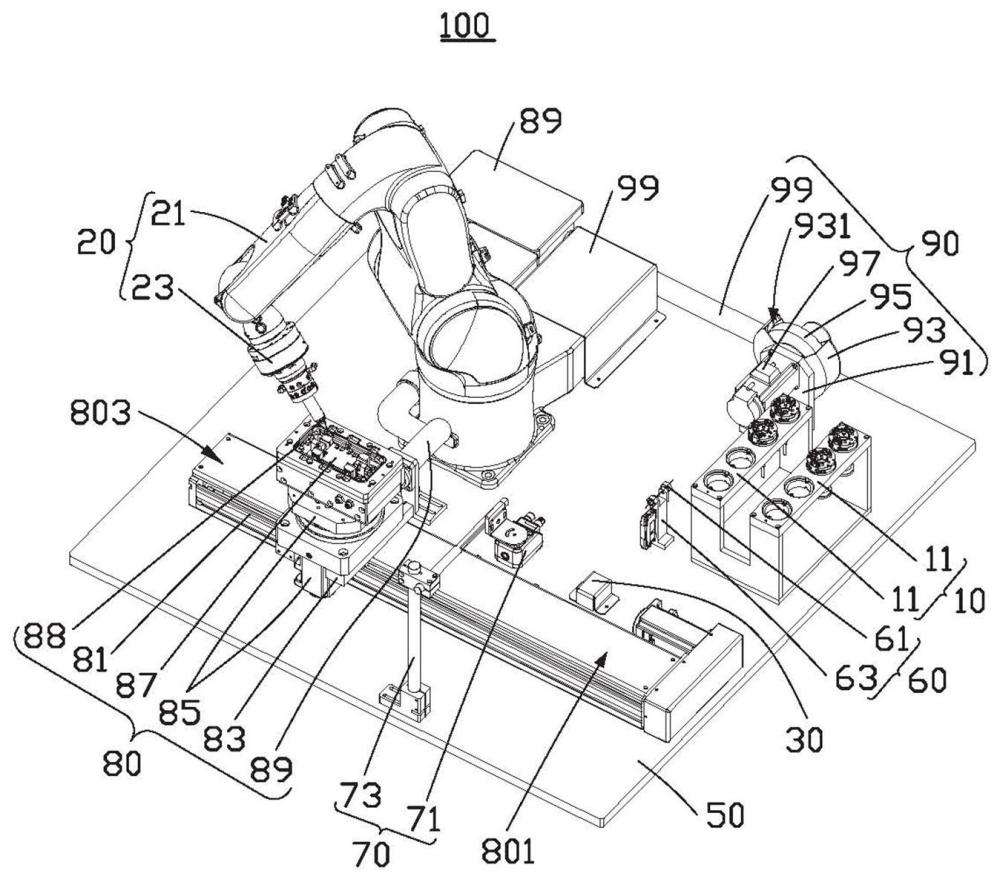
2、本申请实施例提供一种毛刺去除装置,所述毛刺去除装置包括工具库、机器人和视觉机构;所述工具库用于放置去毛刺的预定工具,所述预定工具至少包括第一打磨工具、第二打磨工具和第三打磨工具;所述机器人包括机械臂和力传感器,所述力传感器设于所述机械臂,所述预定工具连接在所述机械臂的末端,所述机械臂用于带动所述力传感器及所述预定工具运动,所述力传感器用于检测所述预定工具在抵接待去除毛刺的工件处产生的压力;所述视觉机构邻近所述机器人设置,用于获取所述工件上的毛刺信息,所述毛刺信息包括毛刺类型信息、毛刺大小信息和毛刺位置信息;其中所述机器人用于根据所述视觉机构的检测,选择去毛刺的所述预定工具,并将所述预定工具按照预设姿态抵接所述工件,所述机器人还用于根据所述力传感器所检测的压力,实时调整所述预定工具在抵接所述工件处的压力,且按照预设的加工轨迹对所述工件进行毛刺去除。
3、在一些实施例中,所述第一打磨工具包括油石和砂纸,所述油石的粗糙度范围为400目-600目,所述油石在抵接所述工件时相对于所述工件的角度范围为15°-30°,所述油石在抵接所述工件处产生的压力的范围为0.3kg-0.5kg,所述砂纸的粗糙度范围为2500目-3500目,所述砂纸在抵接所述工件处产生的压力的范围为0.3kg-0.5kg,所述砂纸在抵接所述工件时相对于所述工件的角度范围为60°-75°。
4、在一些实施例中,所述第二打磨工具包括锉刀,所述锉刀的粗糙度范围为60目-200目,所述锉刀在抵接所述工件处产生的压力的范围为0.5kg-0.8kg,所述锉刀在抵接所述工件时相对于所述工件的角度范围为0°-30°。
5、在一些实施例中,所述第三打磨工具包括牙签,所述牙签在抵接所述工件处产生的压力的范围为0.1kg-0.3kg,所述牙签在抵接所述工件时相对于所述工件的角度范围为0°-30°。
6、在一些实施例中,所述毛刺去除装置还包括:标定机构,邻近所述工具库设置,所述标定机构用于对所述机器人所选择的所述预定工具进行标定;所述标定机构包括标定传感器,所述标定传感器用于在所述机器人带动所述预定工具靠近时检测其与所述预定工具之间的距离。
7、在一些实施例中,所述去毛刺装置还包括上下料机构,所述上下料机构包括移载组件、滑台、旋转组件、承载台和定位组件,所述移载组件邻近所述机器人设置,所述滑台滑动地设于所述移载组件上以在所述移载组件的带动下在一上料位和一去毛刺位之间进行传送,所述旋转组件设于所述滑台上,所述承载台与所述旋转组件连接以在所述旋转组件的带动下进行旋转,所述定位组件设于所述承载台上,所述承载台用于承载所述工件,所述定位组件用于将所述工件固定于所述承载台上。
8、在一些实施例中,所述上下料机构还包括负压组件,所述负压组件的负压口用于与所述滑台连通,并通过所述旋转组件与所述承载台连通,所述负压组件用于吸取去除所述工件上的毛刺产生的粉尘。
9、在一些实施例中,所述毛刺去除装置还包括修形机构,所述修形机构包括支架、壳体、摩擦轮、驱动件和吸尘组件,所述支架邻近所述工具库设置,所述壳体设于所述支架上,所述壳体开设有开口,所述摩擦轮转动地设于所述壳体内并穿设于所述壳体的开口,所述驱动件设于所述支架并与所述摩擦轮连接,所述驱动件用于驱动所述摩擦轮转动以对所述预定工具进行打磨修形,所述吸尘组件的吸尘口与所述壳体连接并与所述壳体内连通,所述吸尘组件用于吸取打磨修形所述预定工具产生的粉尘。
10、在一些实施例中,所述机器人还包括连接套,所述连接套连接于所述机械臂的末端,所述连接套用于连接所述预定工具,所述力传感器设于所述连接套的上面。
11、在一些实施例中,所述机器人还包括快换公盘和快换母盘,所述快换公盘与所述机械臂的末端连接,所述力传感器设于所述机械臂和所述快换公盘之间,所述连接套上装配有所述快换母盘,所述快换公盘与所述快换母盘相适配,所述机械臂通过所述快换公盘和所述快换母盘以快速更换所述预定工具。
12、上述毛刺去除装置,机器人能够根据视觉机构所获取的毛刺信息选择相应的去毛刺的预定工具,并将预定工具按照预设姿态抵接工件,机器人还能够根据力传感器所检测的压力,实时调整预定工具在抵接工件处产生的压力,并在力传感器所检测的压力达到预设压力时,机器人带动预定工具按照预设的加工轨迹对工件进行毛刺去除,实现根据不同类型的毛刺选择不同类型的去毛刺的工具和预设的加工轨迹进行有效的毛刺去除作业,有效减轻人工的劳动强度,有利于提升生产效率。
技术特征:1.一种毛刺去除装置,其特征在于,所述毛刺去除装置包括:
2.如权利要求1所述的毛刺去除装置,其特征在于,所述第一打磨工具包括油石和砂纸,所述油石的粗糙度范围为400目-600目,所述油石在抵接所述工件时相对于所述工件的角度范围为15°-30°,所述油石在抵接所述工件处产生的压力的范围为0.3kg-0.5kg,所述砂纸的粗糙度范围为2500目-3500目,所述砂纸在抵接所述工件处产生的压力的范围为0.3kg-0.5kg,所述砂纸在抵接所述工件时相对于所述工件的角度范围为60°-75°。
3.如权利要求1所述的毛刺去除装置,其特征在于,所述第二打磨工具包括锉刀,所述锉刀的粗糙度范围为60目-200目,所述锉刀在抵接所述工件处产生的压力的范围为0.5kg-0.8kg,所述锉刀在抵接所述工件时相对于所述工件的角度范围为0°-30°。
4.如权利要求1所述的毛刺去除装置,其特征在于,所述第三打磨工具包括牙签,所述牙签在抵接所述工件处产生的压力的范围为0.1kg-0.3kg,所述牙签在抵接所述工件时相对于所述工件的角度范围为0°-30°。
5.如权利要求1所述的毛刺去除装置,其特征在于,所述毛刺去除装置还包括:
6.如权利要求1所述的毛刺去除装置,其特征在于,所述去毛刺装置还包括上下料机构,所述上下料机构包括移载组件、滑台、旋转组件、承载台和定位组件,所述移载组件邻近所述机器人设置,所述滑台滑动地设于所述移载组件上以在所述移载组件的带动下在一上料位和一去毛刺位之间进行传送,所述旋转组件设于所述滑台上,所述承载台与所述旋转组件连接以在所述旋转组件的带动下进行旋转,所述定位组件设于所述承载台上,所述承载台用于承载所述工件,所述定位组件用于将所述工件固定于所述承载台上。
7.如权利要求6所述的毛刺去除装置,其特征在于,所述上下料机构还包括负压组件,所述负压组件的负压口用于与所述滑台连通,并通过所述旋转组件与所述承载台连通,所述负压组件用于吸取去除所述工件上的毛刺产生的粉尘。
8.如权利要求1所述的毛刺去除装置,其特征在于,所述毛刺去除装置还包括修形机构,所述修形机构包括支架、壳体、摩擦轮、驱动件和吸尘组件,所述支架邻近所述工具库设置,所述壳体设于所述支架上,所述壳体开设有开口,所述摩擦轮转动地设于所述壳体内并穿设于所述壳体的开口,所述驱动件设于所述支架并与所述摩擦轮连接,所述驱动件用于驱动所述摩擦轮转动以对所述预定工具进行打磨修形,所述吸尘组件的吸尘口与所述壳体连接并与所述壳体内连通,所述吸尘组件用于吸取打磨修形所述预定工具产生的粉尘。
9.如权利要求1所述的毛刺去除装置,其特征在于,所述机器人还包括连接套,所述连接套连接于所述机械臂的末端,所述连接套用于连接所述预定工具,所述力传感器设于所述连接套的上面。
10.如权利要求9所述的毛刺去除装置,其特征在于,所述机器人还包括快换公盘和快换母盘,所述快换公盘与所述机械臂的末端连接,所述力传感器设于所述机械臂和所述快换公盘之间,所述连接套上装配有所述快换母盘,所述快换公盘与所述快换母盘相适配,所述机械臂通过所述快换公盘和所述快换母盘以快速更换所述预定工具。
技术总结本申请关于一种毛刺去除装置,毛刺去除装置包括工具库、机器人和视觉机构;工具库用于放置去毛刺的预定工具;机器人包括机械臂和设于机械臂的力传感器,机械臂用于带动力传感器及预定工具运动,力传感器用于检测预定工具在抵接待去除毛刺的工件处产生的压力;视觉机构邻近机器人设置,用于获取工件上的毛刺信息;机器人根据视觉机构的检测,选择去毛刺的预定工具,并将预定工具按照预设姿态抵接工件,机器人还根据力传感器所检测的压力,实时调整预定工具在抵接工件处的压力,且按照预设的加工轨迹对工件进行毛刺去除。上述毛刺去除装置,实现根据不同毛刺选择不同去毛刺的工具进行毛刺去除作业,减轻劳动强度,提升生产效率。技术研发人员:龙波,赵志刚,张春明,黄水云受保护的技术使用者:富联裕展科技(深圳)有限公司技术研发日:20230928技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/50725.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表