适用三自由度重力补偿的位置调节臂的制作方法
- 国知局
- 2024-07-08 11:05:24
本发明涉及对于滚动方向、俯仰方向、平行运动方向的三自由度适用重力补偿的位置调节臂。更详细地涉及当进行医疗手术时,与手术工具之类的工作物体的位置无关地全部抵消借助重力的扭矩,以较小的力可改变工作物体的位置的发明。并且,是适用可容易应对工作物体的质量变化的重力扭矩补偿方法,进而是涉及适用根据滚动方向的质量非对称的重力扭矩补偿的位置调节臂的发明。
背景技术:
1、专利文献001涉及重力补偿机构,是设置于可向多个方向旋转的连杆部件的重力补偿机构,提供包括如下的结构:多个锥齿轮,可随着上述连杆部件的旋转相啮合地旋转;凸轮板,与上述多个锥齿轮中的一个以上相连接,与上述锥齿轮一同旋转;以及重力抵消部,与上述凸轮板相连接,随着上述连杆部件和凸轮板的旋转压缩弹性部件,吸收借助上述连杆部件的自重的重力。
2、专利文献002涉及位置调节臂,提供包括如下的结构:底座;滚动体(rollingbody),对于上述底座,能够以第一旋转轴为基准旋转;俯仰连杆(pitching link),对于上述滚动体,能够以向与上述第一旋转轴交叉的方向长长地配置的第二旋转轴为基准旋转;滑块,对于上述滚动体,可向与上述第一旋转轴及上述第二旋转轴交叉的方向滑动;运动转换模块,连接在上述底座及上述滑块之间,随着上述滚动体的旋转运动,使上述滑块相对于上述滚动体滑动;以及弹性模块,连接在上述滑块及上述俯仰连杆之间,至少一部分由具有弹性的材质形成。
3、专利文献003涉及位置调节臂,提供包括如下的结构:连杆组件,具有可沿着通过从一个点存在于规定的位置的远程运动中心(rcm)的虚拟轴平行移动的平行连杆,能够以上述一个点为中心向至少两个方向旋转;以及重力扭矩补偿部,对于借助上述连杆组件的自重作用于上述一个点的重力扭矩,提供相反方向的补偿扭矩。
4、专利文献004涉及位置调节臂,提供包括如下的结构:连杆组件,具有从一个点的距离可变的端部,能够以上述一个点为中心向至少两个方向旋转;以及重力补偿部,对于借助上述连杆组件的自重作用于上述一个点的重力扭矩,提供相反方向的补偿扭矩。
5、专利文献
6、(专利文献001)kr 10-1190228(授权日期:2012年10月12日)
7、(专利文献002)kr 10-1787265(授权日期:2017年10月18日)
8、(专利文献003)kr 10-2188210(授权日期:2020年12月9日)
9、(专利文献004)kr 10-2034950(授权日期:2019年10月15日)
技术实现思路
1、技术问题
2、本发明提供对于滚动方向、俯仰方向、平行运动方向的三自由度适用重力补偿的位置调节臂。
3、解决问题的方案
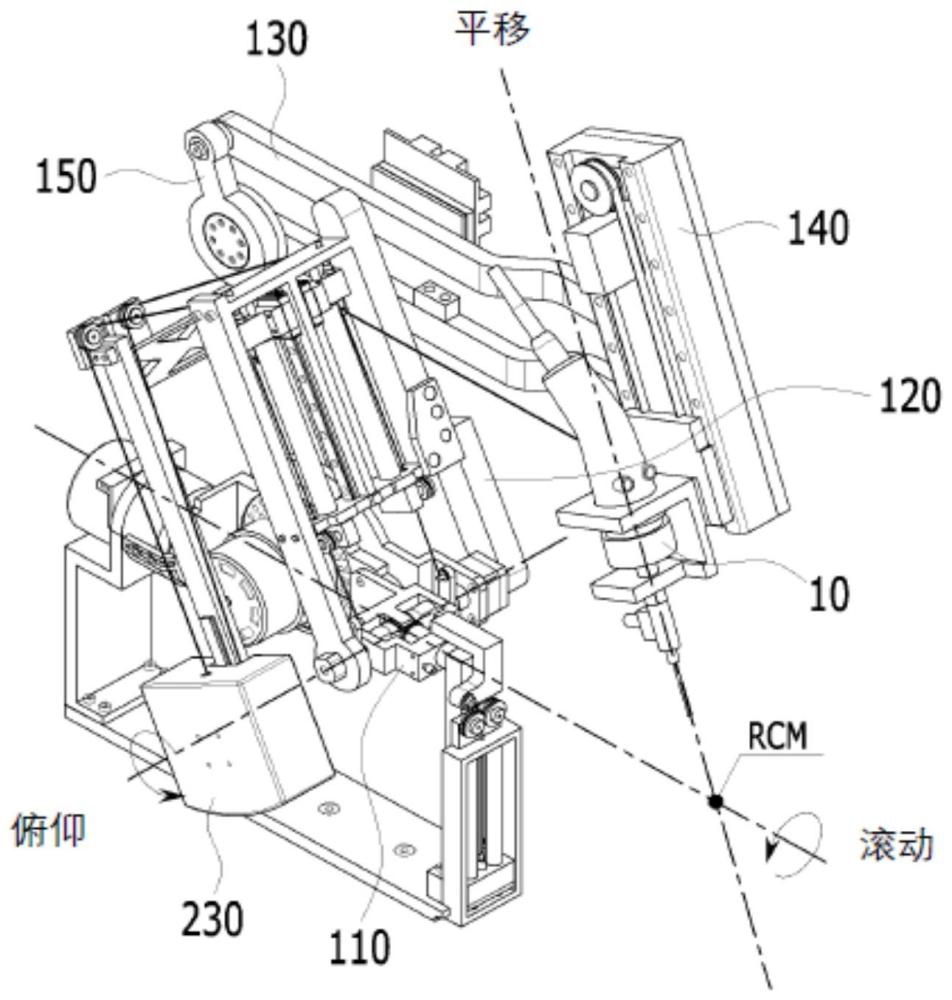
4、本发明涉及将侵袭点作为远程运动中心(remote center of moti on,以下,称为“rcm”)使工作物体移动的适用三自由度重力补偿的位置调节臂,其包括:连杆组件部,能够以上述rcm为中心进行滚动方向及俯仰方向的旋转,能够向上述rcm方向使上述工作物体平行运动;重力补偿部,对于借助作用于上述连杆组件部及上述工作物体的重力的扭矩,提供与上述扭矩相反的方向的补偿扭矩。
5、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述连杆组件部包括:齿轮箱,能够相对于底座进行滚动旋转;第一连杆,能够相对于上述齿轮箱进行俯仰旋转;一对第二连杆,与上述第一连杆形成规定的角,相互保持平行并能够移动;以及第三连杆,与上述第二连杆的一端相结合,能够使上述工作物体进行直线运动。
6、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述连杆组件部包括能够相对于底座进行滚动方向旋转的齿轮箱,上述齿轮箱包括:中心锥齿轮,固定于上述底座;一对旋转锥齿轮,分别与上述中心锥齿轮的两侧相啮合,能够相对于上述中心锥齿轮进行滚动方向旋转。
7、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述重力补偿部包括一对侧力矩臂,上述一对侧力矩臂分别与上述一对旋转锥齿轮相结合,辅助根据上述齿轮箱的滚动方向旋转产生的上述连杆组件部的重力扭矩补偿。
8、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述重力补偿部包括滚动俯仰补偿结构体,上述滚动俯仰补偿结构体与上述一对侧力矩臂相连动,具有提供相对于滚动方向及俯仰方向的旋转的补偿扭矩的一对第一弹性体。
9、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述重力补偿部包括非对称补偿结构体,上述非对称补偿结构体以上述滚动方向的旋转轴为基准,补偿根据连杆组件部的重量非对称性的非对称重力扭矩。
10、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述非对称补偿结构体包括:一对第二弹性体;以及第二滑块,与上述一对第二弹性体的一侧相结合,并能够进行直线运动。
11、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,上述重力补偿部包括配重块,上述配重块抵消随着根据上述工作物体的平行运动的位置变化而改变的上述连杆组件部的上述滚动方向及俯仰方向的重力扭矩的变化以及作用于上述工作物体的上述平行运动方向的残留外力的变化。
12、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,当上述工作物体与上述侵袭点接近地直线移动时,上述配重块向与上述工作物体的直线移动相反的方向进行直线运动。
13、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,包括:第三金属丝,根据上述工作物体的移动调节长度,一端与上述配重块相连接;转换轴承,转换上述第三金属丝的方向。
14、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,包括:正时滑轮,根据上述工作物体的移动而旋转;绞盘滑轮,与上述正时滑轮同轴旋转,卷绕上述第三金属丝的另一端。
15、本发明涉及将侵袭点作为rcm使工作物体移动的适用三自由度重力补偿的位置调节臂,在前面揭示的发明中,根据上述正时滑轮和上述绞盘滑轮的齿轮比,决定上述配重块的移动量。
16、发明的效果
17、本发明可对于滚动方向、俯仰方向、平行运动方向的三自由度全部补偿借助重力的扭矩。
18、并且,由此可自由改变手术工具的位移,通过设置配重块弥补现有的无法根据工作物体的质量变化完全补偿的问题,即使工作物体发生质量变化,也可通过配重块的质量更换容易提供重力扭矩补偿。
19、并且,可通过非对称补偿结构体,以垂直于俯仰轴且包括滚动轴的平面为基准补偿非对称的位置调节臂的重力扭矩。
本文地址:https://www.jishuxx.com/zhuanli/20240617/51953.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表