桥梁位移检测装置及方法与流程
- 国知局
- 2024-07-09 17:05:18
本发明涉及桥梁检测,特别涉及桥梁位移检测装置及方法。
背景技术:
1、桥梁,一般指架设在江河湖海上,使车辆行人等能顺利通行的构筑物。为适应现代高速发展的交通行业,桥梁亦引申为跨越山涧、不良地质或满足其他交通需要而架设的使通行更加便捷的建筑物。桥梁一般由上部构造、下部结构、支座和附属构造物组成,上部结构又称桥跨结构,是跨越障碍的主要结构;下部结构包括桥台、桥墩和基础;支座为桥跨结构与桥墩或桥台的支承处所设置的传力装置;附属构造物则指桥头搭板、锥形护坡、护岸、导流工程等。
2、桥梁建设完成后,由于汽车、行人以及自然因素的缘故,长时间使用后会导致桥板在桥墩上产生位移,若不及时对其进行检测维修,容易导致桥梁坍塌,造成损失较大的安全事故,而现有技术并无较为优良的检测技术,单凭人工检测的话,效率较低,并且容易产生人身安全事故,无法对检测人员的安全提供保障,因此为了解决这一问题,设计一种桥梁位移检测装置及方法是非常有必要的。
技术实现思路
1、本发明要解决现有技术中的桥梁建设完成后,由于汽车、行人以及自然因素的缘故,长时间使用后会导致桥板在桥墩上产生位移,若不及时对其进行检测维修,容易导致桥梁坍塌,造成损失较大的安全事故,而现有技术并无较为优良的检测技术,单凭人工检测的话,效率较低,并且容易产生人身安全事故,无法对检测人员的安全提供保障的技术问题,提供桥梁位移检测装置及方法。
2、为了解决上述技术问题,本发明的技术方案具体如下:
3、桥梁位移检测装置,包括:
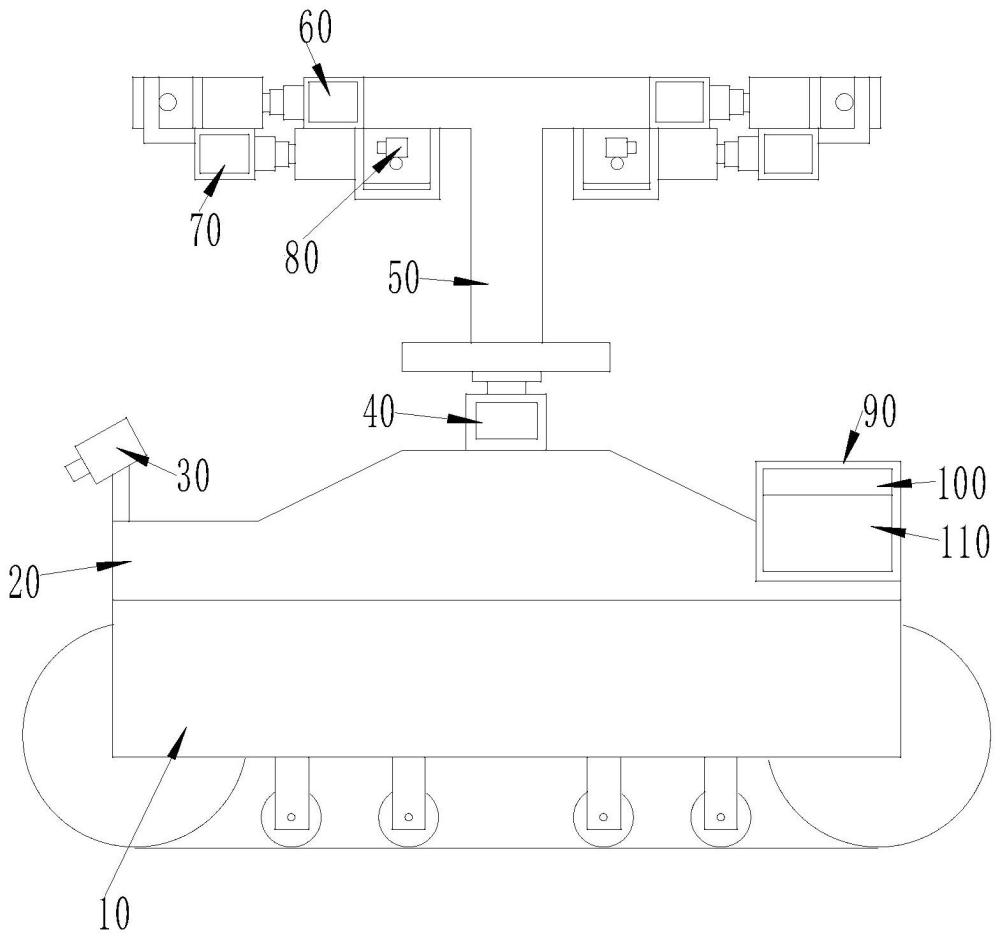
4、无人车本体;
5、第一支撑结构,所述第一支撑结构安装于无人车本体上表面,且所述第一支撑结构用于支撑;
6、观察结构,所述观察结构安装于第一支撑结构上,且所述观察结构用于观察;
7、转动结构,所述转动结构安装于支撑结构上表面,且所述转动结构用于转动;
8、第二支撑结构,所述第二支撑结构安装于转动结构上表面,且所述第二支撑结构用于支撑;
9、第一伸缩结构,所述第一伸缩结构安装于第二支撑结构上,且所述第一伸缩结构用于伸缩;
10、第二伸缩结构,所述第二伸缩结构安装于第一伸缩结构上,且所述第二伸缩结构用于伸缩;
11、检测结构,所述检测结构安装于第二伸缩结构上,且所述检测结构用于检测。
12、优选的,所述第一支撑结构包括:第一支撑座;
13、所述第一支撑座安装于无人车本体上表面。
14、优选的,所述观察结构包括:观察摄像头;
15、所述观察摄像头安装于第一支撑座上。
16、优选的,所述转动结构包括:第一固定架、第一旋转电机、连接块以及转动板;
17、所述第一固定架安装于第一支撑座上表面,所述第一旋转电机安装于第一固定架上,所述连接块安装于第一旋转电机旋转端上,所述转动板安装于连接块上表面。
18、优选的,所述第二支撑结构包括:t型支撑座;
19、所述t型支撑座安装于转动板上表面。
20、优选的,所述第一伸缩结构包括:一对第二固定架、一对第一电控伸缩杆以及一对第一支撑固定块;
21、一对所述第二固定架安装于t型支撑座上,每个所述第一电控伸缩杆安装于第二固定架上,每个所述第一支撑固定块安装于相对应的第一电控伸缩杆伸缩端上。
22、优选的,所述第二伸缩结构包括:一对第一u型支撑板、一对第三固定架、一对第二旋转电机、一对l型支撑块、一对第四固定架、一对第二电控伸缩杆以及一对第二支撑固定块;
23、每个所述第一u型支撑板安装于相对应的第一支撑固定块上,每个所述第三固定架安装于相对应的第一u型支撑板上,每个所述第二旋转电机安装于相对应的第三固定架上,且所述第二旋转电机伸入到第一u型支撑板内,每个所述l型支撑块安装于相对应的第二旋转电机旋转端上,每个所述第四固定架安装于相对应的l型支撑块上,每个所述第二电控伸缩杆安装于相对应的第四固定架上,每个所述第二支撑固定块安装于相对应的第二电控伸缩杆伸缩端上。
24、优选的,所述检测结构包括:一对固定支撑块、一对第二u型支撑板、一对第四固定架、一对第三旋转电机以及一对测距仪;
25、每个所述固定支撑块安装于相对应的第二支撑固定块上,每个所述固定支撑块上设有矩形凹槽,每个所述第二u型支撑板安装于相对应的矩形凹槽处,每个所述第四固定架安装于相对应的第二u型支撑板上,每个所述第三旋转电机安装于相对应的第四固定架上,且所述第三旋转电机伸入到第二u型支撑板内,每个所述测距仪安装于相对应的第三旋转电机旋转端上。
26、优选的,所述无人车本体上设有承载盒体,所述承载盒体内设有无线控制器,所述承载盒体内设有蓄电池。
27、桥梁位移检测装置的桥梁位移检测方法,包括:
28、s1、先将无人车本体移动到桥梁中线处,并通过观察摄像头观察中线位置;
29、s2、通过承载盒体内的无线控制器远程控制第一固定架上的第一旋转电机调整角度,使测距仪位于无人车本体两侧;
30、s3、通过承载盒体内的无线控制器远程输入桥面宽度,并控制第二固定架上的第一电控伸缩杆展开;
31、s4、第一电控伸缩杆展开完成后,通过承载盒体内的无线控制器远程控制第二旋转电机,第二旋转电机带动l型支撑块上的第二电控伸缩杆展开;
32、s5、第二电控伸缩杆展开完成后,通过承载盒体内的无线控制器远程控制第三旋转电机将测距仪展开;
33、s6、测距仪展开完成后,进行测量,并将测量数据通过无线控制器进行反馈,从而检测桥梁是否发生位移。
34、本发明具有以下的有益效果:
35、该一种桥梁位移检测装置及方法可以更好的对桥梁位移进行检测,非常方便,减少了不必要的麻烦,减少了劳动力的消耗,减少了时间的消耗,增加了工作效率,减少了人身安全事故,保障了检测人员的安全,结构相对简单,使用方便。
技术特征:1.桥梁位移检测装置,其特征在于,包括:
2.根据权利要求1所述的桥梁位移检测装置,其特征在于,所述第一支撑结构(20)包括:第一支撑座(21);
3.根据权利要求2所述的桥梁位移检测装置,其特征在于,所述观察结构(30)包括:观察摄像头(31);
4.根据权利要求2所述的桥梁位移检测装置,其特征在于,所述转动结构(40)包括:第一固定架(41)、第一旋转电机(42)、连接块(43)以及转动板(44);
5.根据权利要求4所述的桥梁位移检测装置,其特征在于,所述第二支撑结构(50)包括:t型支撑座(51);
6.根据权利要求5所述的桥梁位移检测装置,其特征在于,所述第一伸缩结构(60)包括:一对第二固定架(61)、一对第一电控伸缩杆(62)以及一对第一支撑固定块(63);
7.根据权利要求6所述的桥梁位移检测装置,其特征在于,所述第二伸缩结构(70)包括:一对第一u型支撑板(71)、一对第三固定架(72)、一对第二旋转电机(73)、一对l型支撑块(74)、一对第四固定架(75)、一对第二电控伸缩杆(76)以及一对第二支撑固定块(77);
8.根据权利要求7所述的桥梁位移检测装置,其特征在于,所述检测结构(80)包括:一对固定支撑块(81)、一对第二u型支撑板(82)、一对第四固定架(83)、一对第三旋转电机(84)以及一对测距仪(85);
9.根据权利要求1所述的桥梁位移检测装置,其特征在于,所述无人车本体(10)上设有承载盒体(90),所述承载盒体(90)内设有无线控制器(100),所述承载盒体(90)内设有蓄电池(110)。
10.根据权利要求1所述的桥梁位移检测装置的桥梁位移检测方法,其特征在于,包括:
技术总结本发明为桥梁位移检测装置及方法,涉及桥梁检测领域,解决了桥梁建设完成后,由于汽车、行人以及自然因素的缘故,长时间使用后会导致桥板在桥墩上产生位移,若不及时对其进行检测维修,容易导致桥梁坍塌,造成损失较大的安全事故,而现有技术并无较为优良的检测技术,单凭人工检测的话,效率较低,并且容易产生人身安全事故,无法对检测人员的安全提供保障的问题。技术特征包括:无人车本体;第一支撑结构,所述第一支撑结构安装于无人车本体上表面,且所述第一支撑结构用于支撑;观察结构,所述观察结构安装于第一支撑结构上,且所述观察结构用于观察。保障了检测人员的安全,结构相对简单,使用方便。技术研发人员:兰海明,哈君,耿俊受保护的技术使用者:中铁吉林投资建设有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/56573.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表