圆柱钢结构自动焊接设备及其焊接方法与流程
- 国知局
- 2024-06-20 17:04:33
本发明涉及钢结构自动焊接领域,尤其是涉及一种圆柱钢结构自动焊接设备及其焊接方法。
背景技术:
1、焊接作为一种高强度的手工技艺,在现代大型和复杂结构建设中面临诸多挑战。随着建筑行业中钢材材料规格的不断提升,如厚度增加、强度增强以及截面尺寸增大,焊接工作量急剧攀升,尤其在超高层或大跨度结构建筑项目中更为突出。传统的手工焊接方法不仅工作效率低下,焊接质量不易保持一致性,而且难以适应现代大型结构对焊接工艺的高标准要求。同时,持续的手工焊接作业对焊工的身体健康造成显著影响,特别是焊接弧光释放出的强烈紫外线和红外线会严重伤害人眼和皮肤。
2、为了克服这些难题,现代工业已广泛采用焊接机器人替代人工进行焊接操作。这不仅能有效改善施工现场的工作环境,减轻焊工的劳动强度,提高焊接作业的安全性,还能够确保焊接质量和生产效率的一致性。针对一般直线焊缝,导轨式焊接机器人可以高效地完成任务,沿着预设导轨精确执行焊接动作。
3、然而,对于特殊形状的焊接需求,例如圆管柱的圆弧形焊缝,导轨式焊接机器人的局限性就显现出来。无法灵活适应圆弧形焊缝的焊接工作,还是需要手工进行高强度焊接工作,故而提出一种圆柱钢结构自动焊接设备及其焊接方法解决上述问题。
技术实现思路
1、本发明的主要目的在于提供一种圆柱钢结构自动焊接设备及其焊接方法,解决现有导轨式焊接机器人无法灵活适应圆弧形焊缝的焊接工作,还是需要手工进行高强度焊接工作的问题。
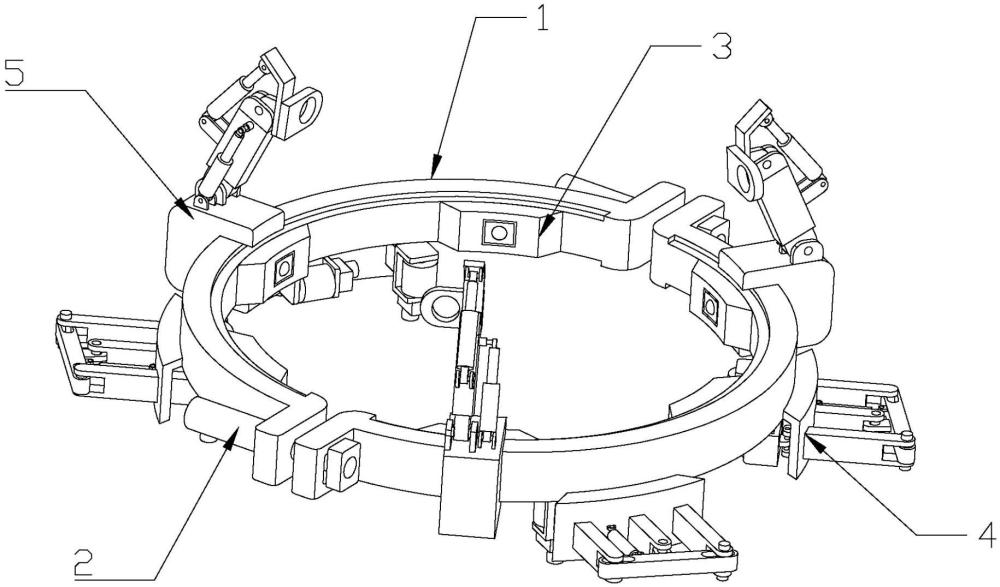
2、为解决上述技术问题,本发明所采用的技术方案是:圆柱钢结构自动焊接设备,包括可抱装在圆柱钢结构外部的抱箍结构,抱箍结构上设置有用于控制松紧度的松紧装置,抱箍结构的内侧设置有多个摩擦组件,抱箍结构的一端设置有多个移动组件,用于控制设备沿圆柱钢结构的轴向或周向移动,另一端设置有若干个焊接组件。
3、优选方案中,抱箍结构包括两个相对称的圆弧箍,当两个圆弧箍相对组合时形成一个圆弧形,将圆柱钢结构抱装在其中,圆弧箍的两端均设置有用于对接的延伸板,其中一个圆弧箍的延伸板上设置有穿孔,另一个圆弧箍的延伸板上设置有止锁槽;
4、松紧装置包括收缩电动推杆,收缩电动推杆的输出端可转动的设置有止锁块,止锁块为长方体,其中,收缩电动推杆设置在设有穿孔的延伸板,其输出轴穿过穿孔,止锁槽为与止锁块相适配的长方形。
5、优选方案中,收缩电动推杆的输出端上设置有旋转中心轴,旋转中心轴的外部设置有两个弧形槽,两个弧形槽沿旋转中心轴的斜对角对称分布,弧形槽的旋转角度为九十度,止锁块可旋转的套装在旋转中心轴外部,且其内部上对称设置有分别与两个弧形槽滑动连接的限位块;
6、弧形槽两端的内底壁上均设置有凹槽,限位块正对凹槽的一侧设置有凸块。
7、优选方案中,摩擦组件包括设置在抱箍结构内侧的橡胶块,橡胶块的内侧设置有可伸缩的滚动组件;
8、可伸缩的滚动组件包括内嵌于橡胶块中的伸缩壳体,伸缩壳体位于橡胶块表面的一端呈开口状,伸缩壳体中活动设置有伸缩座,伸缩座的前端可转动的设置有从开口处凸出的滚珠,伸缩壳体相对的两个内侧壁上均设置有限位滑槽,伸缩座相对的两个侧壁上均设置有与限位滑槽相对应的限位滑块,伸缩座的尾端与伸缩壳体的内壁之间设置有伸缩弹簧。
9、优选方案中,移动组件包括设置在抱箍结构上的支撑架体,支撑架体的外侧设置有杠杆结构,杠杆结构的两端分别活动连接有轴向移动机构和周向移动机构,轴向移动机构和周向移动机构均穿过支撑架体可与圆柱钢结构相接触,支撑架体与杠杆结构之间铰接设置有顶推电缸。
10、优选方案中,支撑架体包括与抱箍结构外壁相连接的横板,以及与横板相连接的竖板,竖板上设置有两个供轴向移动机构或周向移动机构穿过的伸缩口;
11、杠杆结构包括设置在竖板背面的支撑杆,支撑杆的端部铰接设置有旋转杆,旋转杆的两端均设置有连接槽,顶推电缸的两端分别与旋转杆和竖板相铰接;
12、周向移动机构包括可伸缩穿过其中一个伸缩口的周向伸缩调节杆,周向伸缩调节杆的一端设置有活动贯穿其中一个连接槽的周向连接轴,另一端设置有周向驱动轮;
13、轴向移动机构包括可伸缩穿过另一个伸缩口的轴向伸缩调节杆,轴向伸缩调节杆的一端设置有活动贯穿另一个连接槽的轴向连接轴,另一端铰接设置有轴向驱动轮,且铰接处设置有用于复位的复位扭簧;
14、周向驱动轮和轴向驱动轮分别沿圆柱钢结构的周向和轴向设置,周向驱动轮与轴向驱动轮均包括驱动轮、设置在驱动轮侧面并与其传动连接的蜗轮蜗杆减速机,以及与蜗轮蜗杆减速机传动连接的驱动电机。
15、优选方案中,焊接组件包括设置在抱箍结构上的固定支座、设置在固定支座上的角度调节支架,以及设置在角度调节支架上焊接枪头;
16、角度调节支架包括铰接设置在固定支座上的调节大臂,调节臂的另一端铰接设置有调节支座,调节支座的前侧设置有焊枪夹具,固定支座的顶部铰接设置有第一调节电缸,第一调节电缸的另一端与调节大臂相铰接,调节大臂上铰接设置有第二调节电缸,第二调节电缸的另一端与调节支座相铰接;
17、焊枪夹具上设置有激光模块。
18、优选方案中,圆弧箍的上下两侧均设有用于安装固定支座的止锁台阶;
19、固定支座包括内部呈中空状的c形壳体,c形壳体的开口可插接在圆弧箍的外部,c形壳体中活动设置有与止锁台阶相适配的止锁结构。
20、优选方案中, c形壳体开口处的相对壁面上均设置有夹持槽,中部壁面上设置有穿出口,c形壳体的相对内壁面上均设置有止锁滑动槽,止锁滑动槽的末端设置有贯穿c形壳体壁面的卡孔;
21、止锁结构包括活动设置在c形壳体中的支撑板,支撑板与c形壳体的内壁之间设置有压缩弹簧,支撑板的前端设置有从穿出口穿出的抵触块,支撑板的上下两端铰接设置有两个相对称的l形夹臂,两个l形夹臂分别延伸至c形壳体开口处的上下两侧,且前端的立板可穿过夹持槽,l形夹臂与支撑板之间设置有复位扭簧,复位扭簧使两个l形夹臂保持张开的状态,c形壳体的内顶壁和内底壁上对称设置有移动导向块,移动导向块上设置有导向坡面,导向坡面的前端与l形夹臂相抵触,当l形夹臂向后滑动时,在导向坡面抵触下向内转动,支撑板的两侧还设置与止锁滑动槽滑动连接的止锁滑动块,止锁滑动块中还设置有可与卡孔相卡接的弹力锁定组件;
22、止锁滑动块的内部呈中空状,且正对卡孔的一侧设置有延伸孔,弹力锁定组件包括设置在止锁滑动块中的张力弹簧,张力弹簧的前端设置有宽度小于延伸孔直径的限位板,限位板的另一侧设置有可从延伸孔穿出的锁定凸块。
23、该方法包括:
24、s1、将两个圆弧箍抱装至需要进行焊接的圆柱钢结构上,使收缩电动推杆的止锁块穿过对应的止锁槽,然后旋转止锁块并控制电动推杆收缩夹住圆柱钢结构;
25、s2、控制顶推电缸的顶推,使轴向移动机构抵触圆柱钢结构,并控制电动推杆调整圆弧箍的松紧度,启动轴向移动机构使自动焊接设备在圆柱钢结构上轴向移动,直至移动至焊接位置;
26、s3、控制电动推杆收缩,使圆弧箍再次加紧圆柱钢结构,并控制顶推电缸的顶推,使轴向移动机构回缩并使周向移动机构抵触圆柱钢结构,然后控制电动推杆调整圆弧箍的松紧度;
27、s4、控制焊接组件上的焊接枪头对焊接处进行焊接,同时启动周向移动机构,使设备沿周向旋转,进行全方位焊接,同时利用激光模块跟踪焊接位置,并通过角度调节支架自动调整焊接角度,直至焊接完毕,移动至空旷位置并拆除焊接设备。
28、本发明提供了一种圆柱钢结构自动焊接设备及其焊接方法,通过抱箍结构,可将焊接组件抱装在圆柱钢结构的外部,同时利用移动组件可使焊接组件在圆柱钢结构上进行轴向和周向的移动,利用轴向移动可将焊接设备移动至焊接位置,利用周向移动,便于对焊接位置进行圆弧焊接,进而导轨式焊接机器人无法灵活适应圆弧形焊缝的焊接工作的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240618/14795.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表