一种教育机器人的唤醒控制装置的制作方法
- 国知局
- 2024-07-17 12:57:27
本技术涉及机器人,具体为一种教育机器人的唤醒控制装置。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务,历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、例如公告号为cn211388810u,中国专利名称为一种在线控制教育机器人,包括:机器人本体,机器人本体内安装有电性组件,机器人本体上连接有开关,机器人本体的上端固定连接有显示屏,显示屏的上端固定连接有扬声器,机器人本体的底端相对两侧均固定连接有支撑脚,每个支撑脚上均固定连接有连接座,每个连接座的底端均固定连接有防滑垫,每个连接座上均插接有连接杆,每个连接杆的一端均固定连接有支撑块。本实用新型通过外部控制的控制下,机器人本体内的电性组件开始工作,在显示屏上播放存储模块内存储的教育视频,在显示屏一侧受到碰撞后,由于连接杆倾斜固定,底部连接支撑块,使得机器人不会发生倾倒,有效的保护机器人。
3、但是,现有的教育型机器人在使用时,会误触发唤醒,导致有效唤醒率较为低下的问题;因此,不满足现有的需求,对此我们提出了一种教育机器人的唤醒控制装置。
技术实现思路
1、本实用新型的目的在于提供一种教育机器人的唤醒控制装置,以解决上述背景技术中提出的现有教育型机器人在使用时,会误触发唤醒,导致有效唤醒率较为低下的问题。
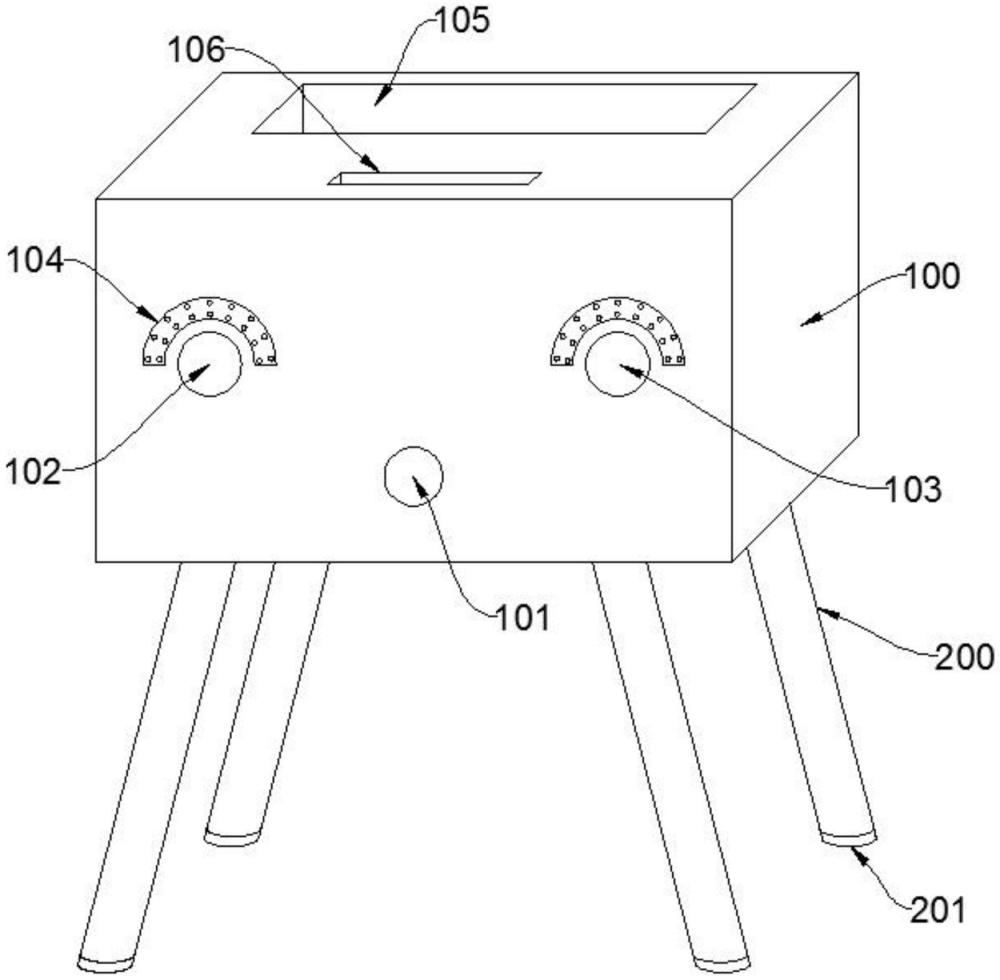
2、为实现上述目的,本实用新型提供如下技术方案:一种教育机器人的唤醒控制装置,包括:教育机器人主体,所述教育机器人主体的下端面设置有柱脚,且柱脚设置有四个,四个所述柱脚的下端面设置有防滑垫,且防滑垫与柱脚的下端面热熔连接;
3、还包括:
4、遮挡传感器,其安装在所述教育机器人主体内部前方的一侧,所述教育机器人主体内部前方的另一侧设置有红外传感器,所述红外传感器和遮挡传感器一端均贯穿并延伸至教育机器人主体内部,所述红外传感器和遮挡传感器另一端的上侧设置有音响孔,且音响孔与教育机器人主体一体式形成;
5、内腔体,其安装在所述教育机器人主体的内部,所述内腔体内部的前侧设置有滚珠丝杆,且滚珠丝杆一端与教育机器人主体内壁固定连接,所述滚珠丝杆的外侧设置有移动电机,且移动电机与滚珠丝杆前后移动,所述移动电机的外侧设置有转动电轴,所述转动电轴的下端面设置有连接杆体,所述连接杆体的一端设置有伺服电机,所述伺服电机的前方设置有圆环,所述圆环通过连接杆件与伺服电机动力输出端固定连接,所述圆环外壁的前端面设置有清理毛刷,且清理毛刷设置有若干个,若干个所述清理毛刷均与圆环固定连接。
6、优选的,所述滚珠丝杆另一端设置有限位块,且限位块与滚珠丝杆另一端固定连接。
7、优选的,所述内腔体内部的中间位置处设置有主处理器,所述主处理器均与姿态检测探头、红外传感器和遮挡传感器电性连接。
8、优选的,所述教育机器人主体上端面的一侧设置有临时物件放置槽,且临时物件放置槽与教育机器人主体一体式形成。
9、优选的,所述临时物件放置槽的前侧设置有把手槽,且把手槽与教育机器人主体一体式形成。
10、优选的,所述圆环与伺服电机转动连接。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过在教育机器人主体上设置的姿态检测探头和红外传感器,遮挡传感器和红外传感器一起运行,当遮挡传感器被遮挡发出信号的时候,同时设置的红外传感器将前方物件的辐射能量转化成热量,当热量是符合人体热量值后,再进行信号输送,两项结合,可以最大化避免现有的教育型机器人在使用时,会误触发唤醒,导致有效唤醒率较为低下的问题。
13、2、通过设置的滚珠丝杆、移动电机、转动电轴、伺服电机、圆环和清理毛刷,使用清洁的时候,通过转动电轴将圆环从上方翻转到下方,再通过移动电机在滚珠丝杆上移动,将圆环贴合在音响孔位置,开启伺服电机,带动圆环在音响孔旋转,从而清理毛刷对音响孔中积攒粉尘进行清理,避免声音传播受到影响。
技术特征:1.一种教育机器人的唤醒控制装置,包括教育机器人主体(100),所述教育机器人主体(100)的下端面设置有柱脚(200),且柱脚(200)设置有四个,四个所述柱脚(200)的下端面设置有防滑垫(201),且防滑垫(201)与柱脚(200)的下端面热熔连接;
2.根据权利要求1所述的一种教育机器人的唤醒控制装置,其特征在于:所述滚珠丝杆(113)另一端设置有限位块(11301),且限位块(11301)与滚珠丝杆(113)另一端固定连接。
3.根据权利要求1所述的一种教育机器人的唤醒控制装置,其特征在于:所述内腔体(107)内部的中间位置处设置有主处理器(108),所述主处理器(108)均与姿态检测探头(101)、红外传感器(102)和遮挡传感器(103)电性连接。
4.根据权利要求1所述的一种教育机器人的唤醒控制装置,其特征在于:所述教育机器人主体(100)上端面的一侧设置有临时物件放置槽(105),且临时物件放置槽(105)与教育机器人主体(100)一体式形成。
5.根据权利要求4所述的一种教育机器人的唤醒控制装置,其特征在于:所述临时物件放置槽(105)的前侧设置有把手槽(106),且把手槽(106)与教育机器人主体(100)一体式形成。
6.根据权利要求1所述的一种教育机器人的唤醒控制装置,其特征在于:所述圆环(109)与伺服电机(110)转动连接。
技术总结本技术公开了一种教育机器人的唤醒控制装置,涉及机器人技术领域,为解决现有的教育型机器人在使用时,会误触发唤醒,导致有效唤醒率较为低下的问题。所述遮挡传感器安装在所述教育机器人主体内部前方的一侧,所述教育机器人主体内部前方的另一侧设置有红外传感器,所述红外传感器和遮挡传感器一端均贯穿并延伸至教育机器人主体内部,所述红外传感器和遮挡传感器另一端的上侧设置有音响孔,且音响孔与教育机器人主体一体式形成。技术研发人员:张利培受保护的技术使用者:南京紫光科教仪器有限公司技术研发日:20231020技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/107265.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表