一种地铁车钩定位状态监测方法及系统与流程
- 国知局
- 2024-08-01 08:31:11
本发明涉及地铁车钩定位,具体涉及一种地铁车钩定位状态监测方法及系统。
背景技术:
1、地铁列车的车钩是其重要组成部件,它的主要用途包括连接或分离车辆、传递牵引力和冲击力及缓和及衰减列车运动由于牵引力的变化和制动力前后不一致而引起的冲击和振动,具有连接、牵引、缓冲等功能。在调车场进行调车作业是,需要将列车与编组车辆进行挂钩操作,在挂钩操作前,连挂的列车及车辆应将车钩钩位置于全开位置,才能实现自动挂钩。在挂钩操作结束后,车钩应处于闭锁位置,即钩舌被钩锁铁挡住,不能向外转开,此时列车与编组车辆就被连挂在一起。
2、传统车钩系统多以机械产品的型式存在,除观看外观外很难通过其他办法获得零部件的状态,因为缺少牢靠的监测手段,不仅会给地铁列车的平安运行带来了隐患,而且也降低了车钩的运营、维护效率。
3、地铁列车自动车钩对接过程中,由于轨道弯曲以及车钩之间的位置差异,车钩对接时会导致对接面水平、垂直方向产生偏移,水平、垂直角度存在偏差,当偏移、偏差超过一定范围时会导致车钩对接失败,轻则会对车钩以及车辆结构造成一定损坏,重则导致现场人员的伤亡甚至后续发生重大安全事故,从而带来巨大的损失。传统对接需要周边多人(一般4~5人)在不同的角度观察车钩的状态,通过经验估计距离、偏移以及角度判断最终对接成功与否。通过经验估计的方式受到空间范围、灯光强度等因素影响,难以准确判断,并且整个过程需要多人配合,耗费较长时间,且存在一定风险。
技术实现思路
1、本发明提出的一种地铁车钩定位状态监测方法,以解决上述背景技术中提出的监测手段不牢靠、人力投入大、风险高等技术问题。
2、为实现上述目的,本发明采用了以下技术方案:
3、一种地铁车钩定位状态监测方法,包括基于地铁车钩定位状态监测系统,所述地铁车钩定位状态监测系统包括监测主机、监测装置,所述监测装置包括包含相机、中央处理模块的监测端和包含标定板的标定端,其特征在于,包括以下步骤,
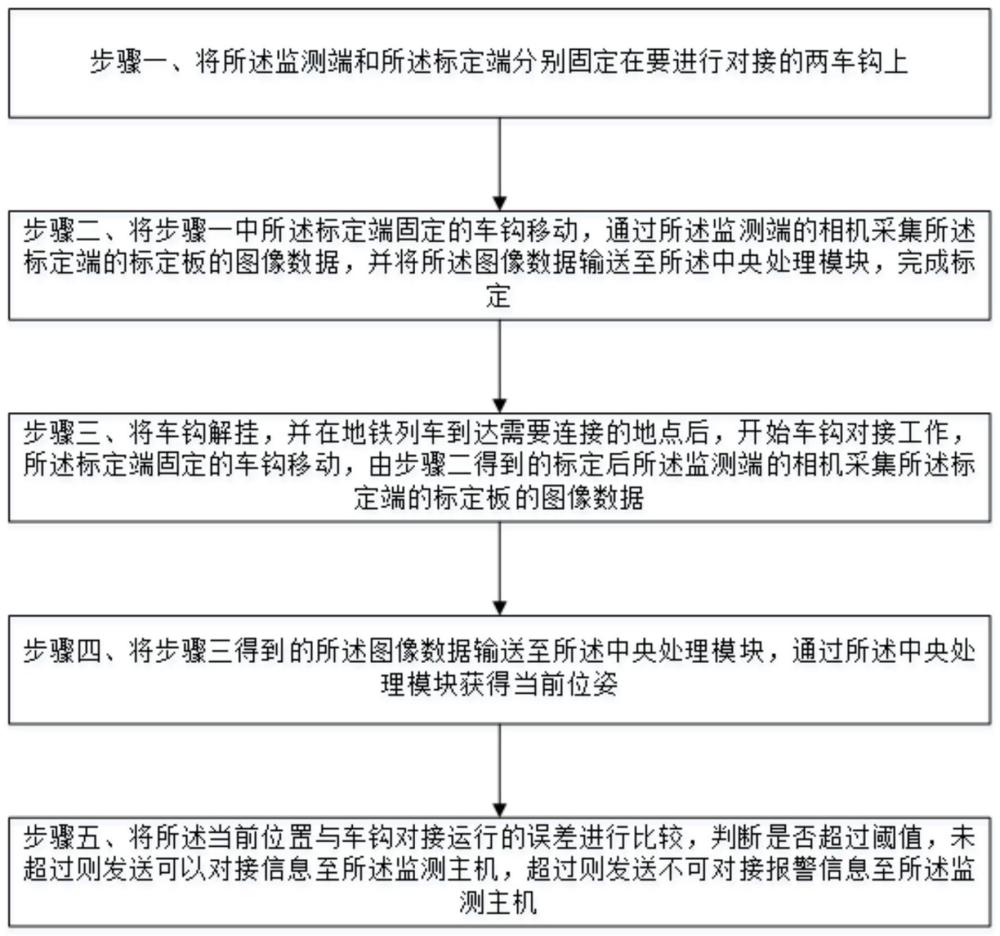
4、步骤一、将监测端和标定端分别固定在要进行对接的两车钩上;
5、步骤二、将步骤一中所述标定端固定的车钩移动,通过所述监测端的相机采集所述标定端的标定板的图像数据,并将所述图像数据输送至所述中央处理模块,完成标定;
6、步骤三、将车钩解挂,并在地铁列车到达需要连接的地点后,开始车钩对接工作,所述标定端固定的车钩移动,由步骤二得到的标定后所述监测端的相机采集所述标定端的标定板的图像数据;
7、步骤四、将步骤三得到的所述图像数据输送至所述中央处理模块,通过所述中央处理模块获得当前位姿;
8、步骤五、将所述当前位置与车钩对接运行的误差进行比较,判断是否超过阈值,未超过则发送可以对接信息至所述监测主机,超过则发送不可对接报警信息至所述监测主机。
9、进一步地,步骤二和步骤三中,标定端固定的车钩移动速度小于0.5米每秒,相机采集标定端的标定板的图像数据大于50帧每秒。
10、进一步地,步骤二和步骤三中,所述标定板的图像数据为标定板相平面的图像坐标系像素位置(u,v)。
11、进一步地,步骤四中,所述中央处理模块获得当前位姿具体包括:
12、将所述图像坐标系像素位置(u,v)转换为相机坐标系信息,并将相机坐标系信息转换为世界坐标系,从而得出位于世界坐标系的两车钩的相对位置信息;
13、所述图像坐标系为一个二维直角坐标系,中间的平面是像面,原点是相机光轴与像面交点也即图像的中心点,x轴,y轴分别与像面的两边平行;
14、所述相机坐标系是一个三维直角坐标系,其原点位于镜头光心处,x,y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直;
15、将世界坐标系的原点设置在一个车钩上,设置y轴垂直与地面的方向,x轴为垂直于铁路轨道的方向,z轴为平行于铁路轨道的方向,则可以确立一个世界坐标系;
16、所述相机坐标系与所述图像坐标系为透视投影关系,所述世界坐标系变换到所述相机坐标系属于刚性变换,图像坐标系物体的相对位置关系通过对拍摄的二维图片进行分析获得,通过所述标定板的图像数据获得两车钩的相对位置信息。
17、进一步地,所述步骤四中还包括,
18、实时测量时,持续拍摄多张图像,获取100组图像,获取标点板点的像素位置(u,v),再转换成世界坐标系的坐标,(xw′,yw′),在z轴相同的情况下与对接成功时的标准值(xw,yw)进行对比,即可求出其x,y方向的偏移,水平偏移|xw-xw′|,垂直偏移|yw-yw′|;
19、取其中二个维度x,z,取当前测量点前5个点进行直线拟合,与标准位置拟合成的直线求取其夹角,即为x轴偏移角度;
20、取其中二个维度y,z进行拟合与标准直线求夹角则为y轴偏移角度。
21、另一方面,本发明还公开一种地铁车钩定位状态监测系统,包括监测端和标定端,用于实现上述的地铁车钩定位状态监测方法,标定端的标定板为可拆卸部分;
22、所述监测端,用于采集标定板图像信息并进行处理、与车钩固定及与监测主机进行通讯;
23、所述监测端包括:
24、采集模块,用于获取所述标定端的标定板的图像数据;
25、中央处理模块,用于处理所述标定端的标定板的图像数据,获得车钩位姿并做出是否可对接的判断;
26、供电模块一,用于给监测端其他设备提供电能;
27、控制模块一,用于控制采集模块和中央处理模块电源的开闭;
28、通讯模块一,用于和监测主机直接进行数据传输;
29、外壳一,用于保护监测端内部设备及固定外露设备;
30、底板一,用于监测端固定内部设备及与车钩连接,
31、所述标定端,用于将标定板和供电通讯等辅助设备固定,提供标定板的图像数据。
32、进一步地,所述标定端包括:
33、标定板模块,用于提供图像信息,可徒手与标定端组合或分离;
34、供电模块二,用于给标定端其他设备提供电能;
35、控制模块二,用于控制标定板模块背光灯的开闭;
36、通讯模块二,用于和监测主机直接进行数据传输;
37、外壳二,用于保护监测端内部设备及固定外露设备;
38、底板二,用于监测端固定内部设备及与车钩连接。
39、进一步地,所述标定板模块,包括高精度透明棋盘格、led灯板、导光板组件、磁体充电母头、磁铁一、前框架、中框架和后框架;
40、所述外壳二,包括周圈外壳二、背板二、顶罩二和两个导向滑槽,所述外露设备包括拉手、两根天线、开关按键和充电口;
41、所述底板二,包括安装底板二、固定弹片组件、定位组件二、磁吸充电公头、磁铁二和挡条;
42、所述标定板模块为可徒手拆卸模块,其外形尺寸与导向滑槽组成的安装空间为小过盈配合,用手将标定板模块压装到位后,磁铁一与底板二上的磁铁二吸合,磁体充电母头与所述磁吸充电公头行程有效电接触,所述导向滑槽为自润滑材质;
43、led灯板固定在中框架内部通过导热双面胶粘结,上面均布led灯珠,其发光面正对所述导光板组件的四个侧面,导光板组件为高透光率材料,其四个侧面为入光面,顶面为出光面,背面为反射面,出光面朝向所述高精度透明棋盘格,上面粘贴漫反射膜,反射面朝向后框架。
44、进一步地,所述采集模块包括用于拍摄标定板图像信息的工业相机和用于拍摄实时画面的可见光相机。
45、进一步地,所述外壳一,包括周圈的外壳一、背板一和顶罩一,所述外露设备包括拉手、两根天线、开关按键、光学玻璃、充电口、外接网口、外接hdmi口和两个外接usb口;
46、所述底板一,包括安装底板一、固定弹片组件、定位组件一;
47、采集模块、中央处理模块、供电模块一、控制模块一、通讯模块及外壳一通过螺纹连接固定在底板一上,拉手通过螺纹连接固定在顶罩一上,光学玻璃通过胶粘连接固定在所述顶罩一上,天线、开关按键、充电口、外接网口、外接hdmi口和usb口通过螺纹连接固定在周圈外壳一上。
48、由上述技术方案可知,本发明的地铁车钩定位状态监测方法,本发明提供的地铁车钩定位状态监测方法及装置,利用在车钩对接时测量固定在两车钩的相机和标定板的相对位置得到两车钩的相对位置,并将状态和判断结果发送至监测主机供人员判断及操作,监测手段可靠、人力投入少、减少了操作风险。
49、具体的说,本发明的有益效果如下:
50、本发明可以实时获取及反馈高清可见光画面、车钩的距离、横向纵向的偏移、角度及是否可对接的结果,能给完全保证车钩的对接成功避免了潜在的事故隐患;
51、本发明模块化设计程度高,设备轻巧,安装方便,一人不使用工具即可完成安装固定工作,减少了人员投入和时间花费;
52、本发明设计与车钩加强连接的结构和带背光的标定板,并且外壳具有防护功能,可以在振动、阴雨天及夜晚等恶劣环境下使用。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232085.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表