一种降低漏报站台区域列车障碍物的自主感知方法和系统与流程
- 国知局
- 2024-08-01 08:51:37
本发明涉及一种轨道交通信号控制领域,尤其是涉及一种降低漏报站台区域列车障碍物的自主感知方法和系统。
背景技术:
1、轨道交通线路的站台区域,往往具有人员众多、情况复杂的特点,容易诸如产生人员落轨、或屏蔽门掉落等突发情况。如果这些障碍物与正在行驶了列车发生碰撞,将会产生严重的安全后果。
2、目前针对该问题,一种应对措施,为采用被动的障碍物识别和报警的方案,即在轨旁或站台指定位置安装探测设备来识别侵限物体,如屏蔽门间隙探测装置,轨旁侵限探测装置就属于这一类方法。这种方法发展比较成熟且应用广泛,但是缺点是不够灵活,只能监测固定区域的障碍物侵限,且必须依靠与车载设备通信来实现防护联动,从发现侵限障碍物到触发列车避险操作的反应时间比较长。
3、另一种应对措施,为列车障碍物自主感知方法,也就是通过安装在列车上的探测装置和处理平台来检测车列前进方向上的障碍物情况,并主动采取避险措施。这种方法在汽车领域已被广泛采用,但在轨道交通上尚属起步阶段。该方法大量依靠基于随机理论的人工智能算法来决策,其求解过程具有不可解释性,计算结果也有不确定性。因此,很难从功能安全的角度,对障碍物识别的“漏报率”做定量上的计算和证明。而障碍物的漏报,直接影响列车的行车安全,是安全关键指标。
4、经过检索,中国发明专利公开号cn112505704a公开了一种提高列车自主智能感知系统安全性的方法及列车。该方法包括:为列车自主智能感知系统设置双雷达且双雷达为异构设置;获取双雷达检测的两个点云数据,并对两个点云数据进行比较,确定两个点云数据的差值是否大于阈值,如果小于阈值,根据两个点云数据输出最终点云数据;根据列车控制系统获取的列车位置在列车控制系统的电子地图中的映射位置,得到列车自主智能感知系统的检测限界;列车自主智能感知系统基于点云格栅算法,通过最终点云数据确定检测限界内是否有障碍物。该现有专利对检测限界的误判和障碍物漏报风险的防护没有介绍。
5、如何实现降低站台区域障碍物的漏报问题,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种降低漏报站台区域列车障碍物的自主感知方法和系统。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种降低漏报站台区域列车障碍物的自主感知方法,该方法包括下列步骤:
4、步骤s1,基于激光雷达和车载atc设备的数据作为输入;
5、步骤s2,通过slam(simultaneous localization and mapping)算法处理激光雷达点云实现列车定位,并加载列车当前位置前方的离线地图实现列车行进区刻画,其中所述列车行进区刻画包括安全验证过程和安全裕度行进区识别过程;
6、步骤s3,使用聚类算法识别列车行进区内的危险障碍物,其中所述列车行进区内的危险障碍物包括安全裕度识别过程。
7、优选地,所述步骤s2中,列车行进区为一个三维空间,表示列车前进方向上会经过的区域。
8、优选地,所述步骤s2中的安全验证过程,用于判断错误的定位结果,并计算定位误差范围。
9、优选地,所述步骤s2中,安全验证过程根据列车行进区刻画阶段的不同,包括初始定位安全验证和站内定位安全验证。
10、更加优选地,所述初始定位安全验证,用于通过计算得到相对准确的定位,作为后续站内定位的基准。
11、更加优选地,所述初始定位安全验证,包括下列步骤:
12、步骤s601,判断是否为初始定位,如果当前处理周期前序三个周期都没有实现列车定位,则本周期为初始定位;
13、步骤s602,加载列车当前位置的前f帧离线地图信息,与列车当前位置采集的完整点云进行匹配计算;
14、步骤s603,判断反馈匹配的结果,若匹配结果为“失败”,则定位结果不可用,系统重新进行初始定位;否则定位结果为可用,同时记录所使用的阈值为定位初始误差。
15、更加优选地,所述站内定位安全验证,用于初始定位成功后,列车进入站内行驶,系统每周期计算定位结果和定位的误差范围。
16、更加优选地,所述站内定位安全验证,包括下列步骤:
17、步骤s801,判断上周期是否为初始定位,若为否,则为站内定位,并给出当前周期的站内定位;
18、步骤s802,采集本周期自动列控系统atc消息中的列车安全速度区间,如果当前处理周期没有接收到atc消息,则使用历史消息中的列车安全速度区间,并对历史安全速度区间的补偿;其中对历史安全速度区间的补偿方式为:
19、[vmin,n,vmax,n]=[vmin,m+(n-m)abrkt,vmax,m+(n-m)aacct]
20、其中m为初始定位周期起第m个后续周期数,n为初始定位周期起第n个后续周期数,且m<n,[vmin,n,vmax,n]为当前周期的列车安全速度区间,abrk和aacc分别为列车的最大制动加速度(为负数)和最大牵引力加速度,vmin,m和vmax,m分别为历史周期数的列车最大安全速度和最小安全速度,t为系统处理周期;
21、步骤s803,根据安全速度区间,对当前周期的站内定位结果进行安全验证;判断当前周期的站内定位locn是否在区间[loc0+∑vmin,nt,loc0+∑vmax,nt]内,其中t为系统处理周期,locn为当前周期的站内定位,loc0为初始定位的定位结果;如果在区间内,则当前周期的站内定位可用,并记录相应的定位误差;否则当前周期的定位结果不可用。
22、优选地,所述步骤s2中,安全裕度行进区识别过程包括下列步骤:
23、步骤901,理论推导列车当前位置朝向,和当前位置到特定距离l的两点连线之间的角度θ8为:
24、
25、其中,rin和lin分别为入弯弯道的曲率半径和列车前方入弯路径内的行进区长度;rout和lout分别为出弯弯道的曲率半径和列车前方出弯路径内的行进区长度;
26、步骤902,考虑位置误差后,误差位置与特定距离l的两点连线之间的角度θ8′为:
27、
28、其中,e为位置误差,rin和lin分别为入弯弯道的曲率半径和列车前方入弯路径内的行进区长度;rout和lout分别为出弯弯道的曲率半径和列车前方出弯路径内的行进区长度;
29、位置误差导致的前方特定距离l的角度偏差为
30、θ=θ8′-θ8
31、近似地,得到距离l位置,水平方向距离偏差d=l*tanθ,其中l=lin+lout;
32、步骤903,在列车行进区边界的基础上,向两边各增加安全裕度d。
33、优选地,所述步骤s2中,安全裕度行进区识别过程,具体为:在得到不同阶段定位误差范围的基础上,推导列车定位误差和行进区尺寸之间的关联关系,并扩大列车行进区范围。
34、优选地,所述步骤s3中,安全裕度识别为安全裕度的聚类阈值设计,包括距离阈值的安全裕度设计和点簇个数阈值的安全裕度设计。
35、更加优选地,所述距离阈值l距离阈值的计算公式:
36、
37、其中d为点云深度方向的距离,θ水平和θ竖直分别为激光雷达水平角分辨率和竖直角分辨率;相邻两点之间的距离设置不小于距离阈值l距离阈值。
38、更加优选地,所述点簇个数阈值num的计算公式:
39、
40、其中系统能够检测的障碍物尺寸为x米见方的箱体,floor表示向下取整,l1水平和l1竖直分别为激光雷达1的水平和竖直方向的距离,l2水平和l2竖直分别为激光雷达2的水平和竖直方向的距离;障碍物能够反射的点数设置不少于num;
41、其中l1水平和l2水平的计算公式为:和
42、l水平=d*tan(θ水平)
43、l1竖直和l2竖直的计算公式为:
44、l竖直=d*tan(θ竖直)
45、其中d为雷达和障碍物之间的距离,θ水平和θ竖直分别为激光雷达水平角分辨率和竖直角分辨率。
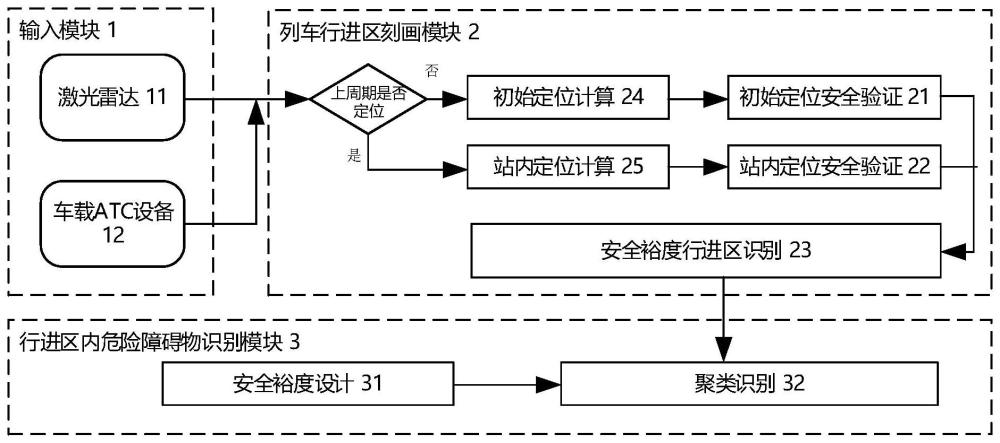
46、根据本发明的第二方面,提供了一种实施所述降低漏报站台区域列车障碍物的自主感知方法的系统,该系统包括输入模块、列车行进区刻画模块和行进区内危险障碍物识别模块,
47、其中所述输入模块包括激光雷达和车载atc设备;
48、所述列车行进区刻画模块包括初始定位安全验证单元、站内定位安全验证单元、安全裕度行进区识别单元、初始定位计算单元和站内定位计算单元;
49、所述行进区内危险障碍物识别模块包括安全裕度设计单元和聚类识别单元;
50、所述列车行进区刻画模块分别与输入模块和行进区内危险障碍物识别模块通信连接,所述初始定位计算单元和站内定位计算单元的定位结果分别发送给初始定位安全验证单元和站内定位安全验证单元做安全验证,再输出到安全裕度行进区识别单元做列车行进区安全裕度扩展;所述聚类识别单元分别与安全裕度行进区识别单元和安全裕度设计单元通信连接。
51、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
52、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
53、与现有技术相比,本发明具有以下有益效果:
54、1.本发明增加了多方面的安全验证,针对“漏报”这种影响行车安全的失效进行防护,进一步提高了列车障碍物自主感知系统的安全性。
55、2.本发明考虑到减少“漏报”必然增加“误报”,分析了系统中导致障碍物漏报的关键参数,并以理论推导为依据“有限制的”增加安全裕度,达到在有效安全防护漏报风险的前提下,减少因此而引起的误报情况。
56、3.该方案直接装在列车上与车载列控设备相连,避免了轨旁设备的通信延迟。当发现危险障碍物时,具有更快的系统反应速度通知到列车采取避险措施。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233702.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表