物流车的控制方法和物流车与流程
- 国知局
- 2024-08-02 16:21:24
本申请涉及物流车领域,具体而言涉及物流车的控制方法和物流车。
背景技术:
1、现有的物流车包括车架、主动轮与从动轮。主动轮和从动轮均连接至车架。主动轮通过链轮和链条连接至从动轮,从而驱动从动轮转动。
2、物流车在一些情况下,只需要主动轮驱动物流车行驶即可。此时,主动轮还需要带动从动轮转动,能量消耗大。此外,从动轮的轮胎的磨损大。
3、为此,本申请提供一种物流车的控制方法和物流车,以至少部分地解决上述问题。
技术实现思路
1、在技术实现要素:部分中引入了一系列简化形式的概念,这将在具体实施例部分中进一步详细说明。本申请的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为至少部分地解决上述技术问题,本申请提供了一种物流车的控制方法,物流车包括从动轮和主动轮,从动轮具有和主动轮传动连接的连接位置,以及和主动轮断开传动连接的断开位置,控制方法包括:
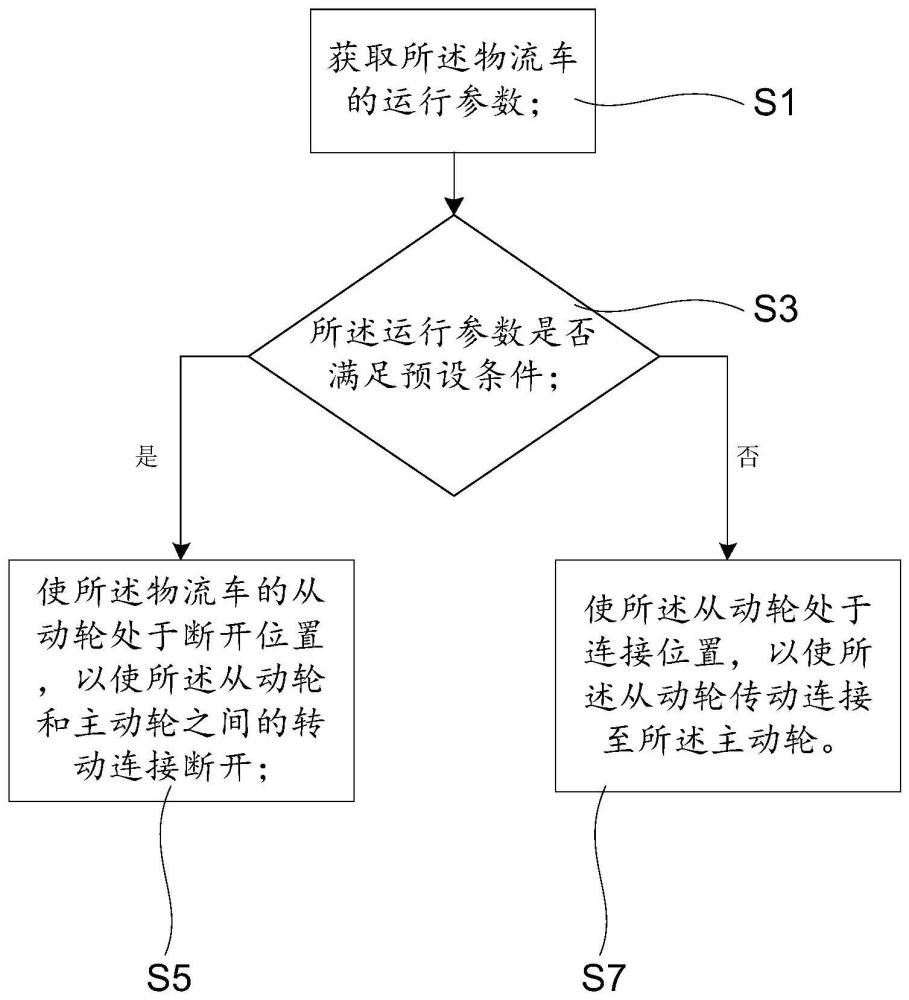
3、获取物流车的运行参数;
4、判断运行参数是否满足预设条件;
5、若所述运行参数满足预设条件,则使物流车的从动轮处于断开位置,以使从动轮和主动轮之间的转动连接断开;
6、若所述运行参数不满足预设条件,则使从动轮处于连接位置,以使从动轮传动连接至主动轮。
7、根据本申请的物流车的控制方法,控制方法在物流车的载重量小于预设载重量,并且/或者在平整路面行驶时,使从动轮位于断开位置,从而只通过主动轮驱动物流车行驶,能够减小能量消耗;在物流车的载重量大于或等于预设载重量,并且/或者在不平整路面行驶时,使从动轮和主动轮一起驱动物流车行驶,可以增加驱动力。
8、可选地,运行参数包括物流车的载重量,
9、判断运行参数是否满足预设条件的步骤包括:判断载重量是否小于预设载重量。
10、可选地,运行参数包括表示探测路段的路面的情况的影像参数,沿物流车的前进方向,探测路段位于物流车的前方,并和物流车相邻,探测路段的长度为预设长度,
11、判断运行参数是否满足预设条件的步骤包括:根据影像参数判断路面是否平整。
12、可选地,每间隔采集时长执行获取所述物流车的运行参数的步骤。
13、可选地,物流车行驶过程中,物流车控制方法还包括匹配步骤,匹配步骤包括:
14、获取从动轮的位置,若是从动轮处于断开位置,则判断当前的w1和当前的w2是否满足|w1-w2|≤wy1;
15、若否,则调节第一主动轮的转速和/或第二主动轮的转速,以使|w1-w2|≤wy1;
16、其中,w1为第一主动轮的转速,w2为第二主动轮的转速。
17、可选地,若是从动轮处于断开位置,则只获取w1和w2。
18、可选地,每间隔第二预设时长采集w1和w2。
19、可选地,物流车行驶过程中,物流车控制方法还包括匹配步骤,匹配步骤包括:
20、获取从动轮的位置,若是从动轮处于连接位置,则判断当前的w1、当前的w2、当前的w1与当前的w2是否满足|w1-w2|≤wy1,或者|w1-w2|≤wy2;
21、若否,则调节第一主动轮的转速或第二主动轮的转速,以使|w1-w2|≤wy1,或者|w1-w2|≤wy2;
22、其中,w1为第一主动轮的转速,w2为第二主动轮的转速,w1为第一从动轮的转速,w2为第二从动轮的转速。
23、可选地,w1、w2为靠近从动轮的外侧从动轴的转速。
24、可选地,每间隔第二预设时长采集w1、w2、w1与w2。
25、可选地,物流车启动第三预设时长后执行匹配步骤。
26、本申请还提供了一种物流车,物流车由前述的控制方法控制。
27、根据本申请的物流车,物流车由前述的控制方法控制,控制方法在物流车的载重量小于预设载重量,并且/或者在平整路面行驶时,使从动轮125位于断开位置,从而只通过主动轮驱动物流车行驶,能够减小能量消耗;在物流车的载重量大于或等于预设载重量,并且/或者在不平整路面行驶时,使从动轮125和主动轮一起驱动物流车行驶,可以增加驱动力。
技术特征:1.一种物流车的控制方法,所述物流车包括从动轮和主动轮,所述从动轮具有和所述主动轮传动连接的连接位置,以及和所述主动轮断开传动连接的断开位置,其特征在于,所述控制方法包括:
2.根据权利要求1所述的物流车的控制方法,其特征在于,所述运行参数包括所述物流车的载重量,
3.根据权利要求1所述的物流车的控制方法,其特征在于,所述运行参数包括表示探测路段的路面的情况的影像参数,沿所述物流车的前进方向,所述探测路段位于所述物流车的前方,并和所述物流车相邻,所述探测路段的长度为预设长度,
4.根据权利要求3所述的物流车的控制方法,其特征在于,每间隔采集时长执行所述获取所述物流车的运行参数的步骤。
5.根据权利要求1所述的物流车的控制方法,其特征在于,所述物流车行驶过程中,所述物流车控制方法还包括匹配步骤,所述匹配步骤包括:
6.根据权利要求5所述的物流车的控制方法,其特征在于,若是所述从动轮处于所述断开位置,则只获取所述w1和所述w2。
7.根据权利要求5所述的物流车的控制方法,其特征在于,每间隔第二预设时长采集所述w1和所述w2。
8.根据权利要求1所述的物流车的控制方法,其特征在于,所述物流车行驶过程中,所述物流车控制方法还包括匹配步骤,所述匹配步骤包括:
9.根据权利要求8所述的物流车的控制方法,其特征在于,所述w1、w2为靠近所述从动轮的外侧从动轴的转速。
10.根据权利要求8所述的物流车的控制方法,其特征在于,每间隔第二预设时长采集所述w1、所述w2、所述w1与所述w2。
11.根据权利要求5至10中任一项所述的物流车的控制方法,其特征在于,物流车启动第三预设时长后执行所述匹配步骤。
12.一种物流车,其特征在于,所述物流车由根据权利要求1至11中任一项所述的控制方法控制。
技术总结本申请公开了一种物流车的控制方法和物流车。控制方法包括:获取物流车的运行参数;判断运行参数是否满足预设条件;若运行参数满足预设条件,则使物流车的从动轮处于断开位置,以使从动轮和主动轮之间的转动连接断开;若运行参数不满足预设条件,则使从动轮处于连接位置,以使从动轮传动连接至主动轮。由此,控制方法在物流车的载重量小于预设载重量,并且/或者在平整路面行驶时,使从动轮位于断开位置,从而只通过主动轮驱动物流车行驶,能够减小能量消耗;在物流车的载重量大于或等于预设载重量,并且/或者在不平整路面行驶时,使从动轮和主动轮一起驱动物流车行驶,可以增加驱动力。技术研发人员:孙宪猛,任冲,姚渊,王儒,林金虹受保护的技术使用者:比亚迪股份有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/250394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表