车辆运动轨迹动态规划方法、装置、车辆及存储介质与流程
- 国知局
- 2024-08-02 16:25:40
本申请涉及自动驾驶,特别涉及一种车辆运动轨迹动态规划方法、装置、车辆及存储介质。
背景技术:
1、智能驾驶中车辆轨迹规划算法作为衔接众多智能驾驶技术模块的重要环节,需要实时响应难以预测的状况,从而保证即使在各种复杂场景下,车辆能够做出及时、安全的响应。在复杂道路条件下的轨迹规划是智能驾驶的重要挑战之一,复杂道路条件可能包括高速公路、狭窄街道、动态/静态障碍物等,需要灵活的、高效的轨迹规划方法进行应对。
2、然而,传统的轨迹规划算法往往仅适用于特定、动态程度较低的场景,当面临新场景时,难以有效应对,并且在现有技术中,往往通过强化学习等人工智能算法实现智能的路径规划,然而,强化学习算法难以分析、理解,安全性难以保障,难以在量产车型中实现应用。亟待解决。
技术实现思路
1、本申请提供一种车辆运动轨迹动态规划方法、装置、车辆及存储介质,以解决传统的路径规划算法仅适用于特定、动态程度较低的场景,当面临新场景时难以有效应对,并且在现有技术中,通过强化学习等人工智能算法实现智能路径规划的方法难以分析和理解,安全性难以保障,难以在量产车型中实现应用等问题。
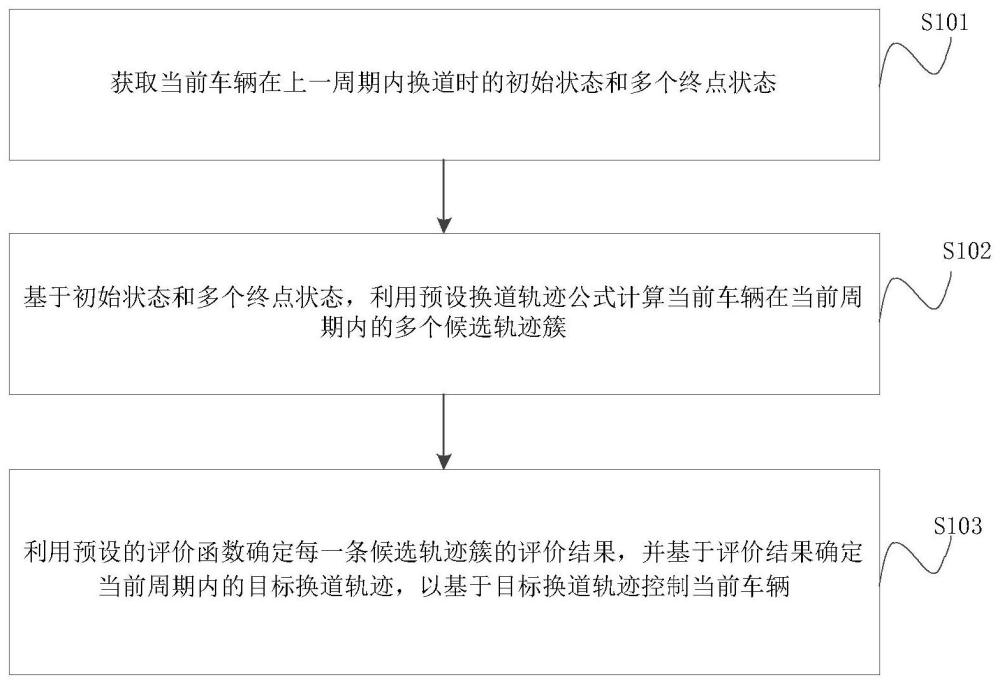
2、本申请第一方面实施例提供一种车辆运动轨迹动态规划方法,包括以下步骤:获取当前车辆在上一周期内换道时的初始状态和多个终点状态;基于所述初始状态和所述多个终点状态,利用预设换道轨迹公式计算所述当前车辆在当前周期内的多个候选轨迹簇;利用预设的评价函数确定每一条候选轨迹簇的评价结果,并基于所述评价结果确定所述当前周期内的目标换道轨迹,以基于所述目标换道轨迹控制所述当前车辆。
3、可选地,所述预设的评价函数为:
4、
5、其中,为第m条轨迹的评价值,为第m条轨迹的势场值,代表安全性,代表舒适性,为第m条轨迹的曲率评价值,为第m条轨迹与上一周期最优轨迹的差异评价值,κm为第m条轨迹的曲率值。ym(k)为本周期内第m条轨迹,yopt(k-1)为上一周期最优轨迹,wp、wκ、wc为权重系数。
6、可选地,在计算当前车辆在当前周期内的多个候选轨迹簇时,包括:检测所述当前车辆在所述上一周期中换道时的横摆角、侧向速度、侧向加速度、初始状态和终点状态;判断所述横摆角、所述侧向速度、所述侧向加速度是否满足预设连续条件,且所述初始状态和所述终点状态是否满足预设的确定唯一换道轨迹条件;若所述横摆角、所述侧向速度和所述侧向加速度均满足所述预设连续条件,且所述初始状态和所述终点状态均满足所述预设的确定唯一换道轨迹条件,则判定换道轨迹为候选轨迹簇。
7、可选地,所述预设换道轨迹公式为:
8、
9、其中,k为周期,为第k周期的起始点坐标,为第k周期的终点坐标,为第k周期的起始点坐标,为第k周期起始点的侧向速度,为第k周期起始点的侧向加速度/2,和为预设系数。
10、可选地,所述获取当前车辆在上一周期内的初始状态和多个终点状态,包括:获取所述当前车辆在所述上一周期内换道时的多个车速、多个换道时间和车道宽度;根据所述多个车速和所述多个换道时间的乘积得到所述当前车辆在所述上一周期内的多个终点横坐标,并根据所述车道宽度确定所述多个终点横坐标对应的多个终点纵坐标,并根据所述多个终点横坐标和所述多个终点纵坐标得到所述多个终点状态。
11、本申请第二方面实施例提供一种车辆运动轨迹动态规划装置,包括:获取模块,用于获取当前车辆在上一周期内换道时的初始状态和多个终点状态;计算模块,用于基于所述初始状态和所述多个终点状态,利用预设换道轨迹公式计算所述当前车辆在当前周期内的多个候选轨迹簇;确定模块,用于利用预设的评价函数确定每一条候选轨迹簇的评价结果,并基于所述评价结果确定所述当前周期内的目标换道轨迹,以基于所述目标换道轨迹控制所述当前车辆。
12、可选地,所述预设的评价函数为:
13、
14、其中,为第m条轨迹的评价值,为第m条轨迹的势场值,代表安全性,代表舒适性,为第m条轨迹的曲率评价值,为第m条轨迹与上一周期最优轨迹的差异评价值,κm为第m条轨迹的曲率值。ym(k)为本周期内第m条轨迹,yopt(k-1)为上一周期最优轨迹,wp、wκ、wc为权重系数。
15、可选地,在计算当前车辆在当前周期内的多个候选轨迹簇时,所述计算模块,还用于:检测所述当前车辆在所述上一周期中换道时的横摆角、侧向速度、侧向加速度、初始状态和终点状态;判断所述横摆角、所述侧向速度、所述侧向加速度是否满足预设连续条件,且所述初始状态和所述终点状态是否满足预设的确定唯一换道轨迹条件;若所述横摆角、所述侧向速度和所述侧向加速度均满足所述预设连续条件,且所述初始状态和所述终点状态均满足所述预设的确定唯一换道轨迹条件,则判定换道轨迹为候选轨迹簇。
16、可选地,所述预设换道轨迹公式为:
17、
18、其中,k为周期,为第k周期的起始点坐标,为第k周期的终点坐标,为第k周期的起始点坐标,为第k周期起始点的侧向速度,为第k周期起始点的侧向加速度/2,和为预设系数。
19、可选地,所述获取模块,用于:获取所述当前车辆在所述上一周期内换道时的多个车速、多个换道时间和车道宽度;根据所述多个车速和所述多个换道时间的乘积得到所述当前车辆在所述上一周期内的多个终点横坐标,并根据所述车道宽度确定所述多个终点横坐标对应的多个终点纵坐标,并根据所述多个终点横坐标和所述多个终点纵坐标得到所述多个终点状态。
20、本申请第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆运动轨迹动态规划方法。
21、本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆运动轨迹动态规划方法。
22、上述实施方式中,获取当前车辆在上一周期内换道时的初始状态和多个终点状态;基于初始状态和多个终点状态,利用预设换道轨迹公式计算当前车辆在当前周期内的多个候选轨迹簇;利用预设的评价函数确定每一条候选轨迹簇的评价结果,并基于评价结果确定当前周期内的目标换道轨迹,以基于目标换道轨迹控制当前车辆。由此,解决了传统的路径规划算法仅适用于特定、动态程度较低的场景,当面临新场景时难以有效应对,并且在现有技术中,通过强化学习等人工智能算法实现智能路径规划的方法难以分析和理解,安全性难以保障,难以在量产车型中实现应用等问题,避免了传统技术方案应对特殊场景适用性差的问题,能够更加有利于实现在量产车型上的部署应用。
23、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:1.一种车辆运动轨迹动态规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述预设的评价函数为:
3.根据权利要求1所述的方法,其特征在于,在计算当前车辆在当前周期内的多个候选轨迹簇时,包括:
4.根据权利要求1所述的方法,其特征在于,所述预设换道轨迹公式为:
5.根据权利要求1所述的方法,其特征在于,所述获取当前车辆在上一周期内的初始状态和多个终点状态,包括:
6.一种车辆运动轨迹动态规划装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述预设的评价函数为:
8.根据权利要求6所述的装置,其特征在于,在计算当前车辆在当前周期内的多个候选轨迹簇时,所述计算模块,还用于:
9.一种车辆,其特征在于,包括存储器、处理器;
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-5中任一所述的车辆运动轨迹动态规划方法。
技术总结本申请涉及自动驾驶技术领域,特别涉及一种车辆运动轨迹动态规划方法、装置、车辆及存储介质,其中,方法包括:获取当前车辆在上一周期内换道时的初始状态和多个终点状态;基于初始状态和多个终点状态,利用预设换道轨迹公式计算当前车辆在当前周期内的多个候选轨迹簇;利用预设的评价函数确定每一条候选轨迹簇的评价结果,并基于评价结果确定当前周期内的目标换道轨迹,以基于目标换道轨迹控制当前车辆。由此,解决了传统的路径规划算法仅适用于特定、动态程度较低的场景,当面临新场景时难以有效应对,并且在现有技术中,通过强化学习等人工智能算法实现智能路径规划的方法难以分析和理解,安全性难以保障,难以在量产车型中实现应用等问题。技术研发人员:李作文,于小洲,李航,张建,王宇,李林润,李伟男,孟祥哲,朱可夫,于淼受保护的技术使用者:中国第一汽车股份有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/250666.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表