用于具有挂车的商用车辆的驾驶员辅助系统及用于控制这种系统的方法与流程
- 国知局
- 2024-08-02 16:28:09
本发明涉及用于具有挂车的商用车辆的驾驶员辅助系统,驾驶员辅助系统能被用于观察和/或监控位于商用车辆的驾驶室之后的空间。本发明还涉及用于控制这种系统的方法。
背景技术:
1、用于商用车辆的基于摄像头的倒车辅助系统以及基于摄像头的载货空间监控系统在不同的实施方式中是已知的。然而,此类驾驶员辅助系统通常只被整合在固定配套的牵引车-挂车组合的挂车中。在具有可更换的挂车的车辆组合中,例如具有半挂车的牵引机中,挂车车辆上往往缺乏可以为挂车配备或加装此类系统的重要先决条件。进行牵引的车辆与被牵引的车辆之间往往没有标准的数据连接。或者现有的数据连接不适用于传输例如在调度时拍摄挂车的后方区域中的图像和图像序列情况下所积累的较大数据量。将摄像头图像传输给牵引车的驾驶室中的仪表板内的监视器时经常出现干扰,或者驾驶室内没有相应构成的监视器。安装附加的挂车数据缆线和/或在驾驶室内固定装入监视器是耗费且昂贵的。另一方面,恰恰是在带着挂车进行向后倒车时往往由于与障碍物相撞而发生损坏。在实践中,往往没有辅助人员对驾驶员进行指引,从而使得发生调度受损的风险特别高。因此,在实践中往往缺少合适的驾驶员辅助系统。
2、wabco公司在(2020年03月)第815 020 211.3号出版物“用于卡车和客车应用的tailguardtm的系统说明”中描述的“tailguard”系统已广为人知。“tailguard”是在wabco公司的(2018年09月)第815 020 093.3号出版物“e0至e5.5的e型tebs的系统说明”中有所描述的电子的挂车制动系统(tebs:英文electronic braking system for trailers;用于挂车的电子制动系统)的可选的扩展。因此,“tailguard”是被装入在挂车车辆中的倒车辅助系统,其借助超声波传感器识别挂车的后方空间两米以内近场中的障碍物。在倒车时,“tailguard”通过如下方式对驾驶员进行支持,即,在接近物体时报警,必要时进行自主制动,并在与所识别到的物体处于安全距离的情况下自动停止车辆,以便避免与行人、装卸平台、栅栏、树木、叉车、汽车或车辆之后的其他对象发生碰撞。与所识别到的对象之间的距离可以经由驾驶室的仪表板内的具有led条的显示器来显示和/或经由闪烁的车道保持灯来显示。
3、所提及的已知的挂车制动系统附加地可以利用在wabco公司的(2018年09月)第815 020 093.3号出版物中也有所描述的“optilink”系统进行扩展。“optilink”是用于移动设备的应用软件(app),其与电子控制单元(“optilink-ecu”)结合地能够实现对挂车车辆的各种功能进行控制。该系统提供了轻松访问电子的挂车制动系统的各种功能,尤其是访问“tailguard”系统。
4、然而,“tailguard”系统与德国社会事故保险(dguv)中的测试和认证机构的最新的“对用于商用车辆的倒车辅助系统的测试和认证的准则”(gs-vl-40(2019年04月)不兼容。尤其地,既不显示关于车辆的定位,也不显示所识别到的对象的大小。
5、此外,用于对挂车车辆的载货空间监控的系统是已知的。de 102018 120 333a1示出了一种用于通过使用安装在载货空间内的光学传感器以及具有用于执行方法的软件的控制设备来监控车辆内的载货空间的方法,控制设备具有针对光学传感器和针对计算机的图形用户界面的无线或有线的接口。例如,光学传感器是摄像头。控制设备是电子制动系统的制动控制设备。计算机例如是移动电话,或者是具有应用软件以及具有作为图形用户界面的屏幕的导航计算机。制动控制设备在特定时间点接收摄像头的图像,并由此产生栅格图像,根据存储在制动控制设备中的栅格,从栅格图像中能识别出对载货空间的占用或占用变化。栅格图像显示在图形用户界面上。
技术实现思路
1、在此背景下,本发明的任务是介绍一种改进的用于具有挂车的商用车辆的驾驶员辅助系统,驾驶员辅助系统以能运行安全且舒适以及廉价的方式被安装或加装。另外的任务在于,描述一种用于控制此类驾驶员辅助系统的方法。
2、这些任务的解决方案由独立权利要求的特征得出,而本发明的有利的设计方案和改进方案能从分别配属的从属权利要求中获得。
3、因此,本发明首先涉及一种用于具有挂车的商用车辆的驾驶员辅助系统,驾驶员辅助系统能用于观察和/或监控位于商用车辆的驾驶室之后的空间,并且驾驶员辅助系统具有:
4、-布置在商用车辆的驾驶室之后的至少一个光学或声学传感器,
5、-其中,利用该传感器能拍摄在传感器的视场之内的图像和图像序列,
6、-与光学或声学传感器电连接的图像处理单元,
7、-其中,在图像处理单元中存储有用于图像分析和用于图像压缩的图像处理软件,
8、-并且其中,图像处理单元可以借助所拍摄的图像或图像序列来检测对象,并且可以关于相对车辆固定的坐标系在对象的大小、定位和运动方面进行分析并可以从中产生经压缩的对象信息,
9、-有线或无线的第一数据连接,
10、-电子控制单元,电子控制单元具有数据输入侧以及数据输出侧,并且与图像处理单元分开布置,
11、-其中,电子控制单元在数据输入侧经由第一数据连接与图像处理单元连接或能连接,以用于传输由图像处理单元所产生的对象信息,
12、-无线的第二数据连接,以及
13、-具有电子的图形用户界面的电子的终端设备,终端设备被定位在挂车之外,
14、-其中,终端设备经由第二数据连接与电子控制单元的数据输出侧以无线方式连接或能连接,
15、-并且其中,能在终端设备上安装应用软件,由图像处理单元提供并经由电子控制单元传输给终端设备的对象信息借助应用软件作为图形简化的、空间或平面几何的呈现能成像在用户界面上。
16、光学传感器在此是指将通过电磁波传输的光学信息转换成能以电方式评估的信号的传感器。光学传感器的电磁谱在此包括紫外光、可见光和红外光。
17、声学传感器在此是指将通过声波传输的声学信息转换成能以电方式评估的信号的传感器。声学传感器的声波谱在此优选包括超声波,但并不限于此。
18、电子的终端设备是指能以无线方式与数据网络或无线电链路联接且具有图形用户界面或能与这种图形用户界面连接的通信设备。这种电子的终端设备例如可以是智能手机、移动电话、导航设备、娱乐设施、个人计算机、平板电脑、笔记本电脑等。因此,所提及的图形用户界面是电子的终端设备的显示屏或屏幕。因此,电子的终端设备可以是移动设备,或者可以是安装在牵引车的驾驶室内的设备。
19、图像压缩这一术语在此是指电子的且基于软件的图像处理,在图像压缩中,数字数据的量被减少,以便缩短数据的传输时间并减少所需的存储空间。
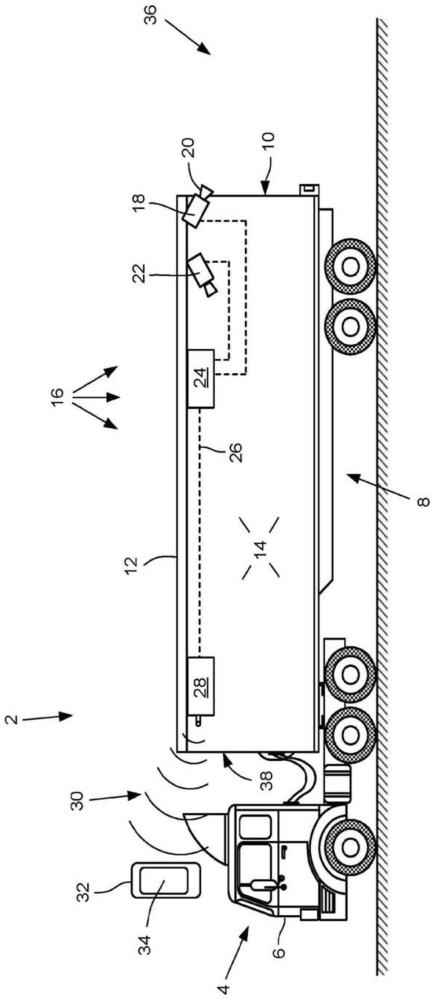
20、通过本发明提供了一种用于挂车车辆的先进的驾驶员辅助系统(adas;英文:advanced driver assistance system),该先进的驾驶员辅助系统能够实现在电子的终端设备上运行安全且舒适地以图形方式显示挂车的后方环境中的障碍物和/或载货空间之内的货物。
21、驾驶员辅助系统有利地将基于传感器的对象检测与用于挂车车辆与电子的终端设备或牵引车之间进行对象数据传输的无线通信组合起来。驾驶员辅助系统可以简单且廉价地安装在挂车车辆上或被加装在那里,这是因为它不需要在进行牵引的车辆与被牵引的车辆之间建立高性能的有线连接。尤其是不需要通常不是现有的标准化的有线的视频数据连接。
22、对传感器的图像数据的处理在图像处理单元(ipu;英文:image processingunit)中进行,该图像处理单元优选靠近光学传感器地布置挂车车辆上。图像处理单元产生经压缩的对象信息,这大大减少了所积累的图像数据的量,并且尽管如此仍包含了有关借助图像检测到的对象的主要信息。这种在图像处理单元中大幅减少图像数据是特别有利的,这是因为图像处理单元就能够实现经由简单且廉价的数据连接传输经压缩的对象信息,并且仍是可靠的。
23、因此,图像处理单元的主要任务是以感测方式检测对象以及通过限制其主要内容来减少传输带宽,即每秒要传输的数据量。以感测方式进行对象识别应符合开头已述的根据“对用于商用车辆的倒车辅助系统的测试和认证的准则”(gs-vl-4,2019年04月,德国社会事故保险(dguv)中的测试和认证机构)的指导方针。在此应实现尽可能高的更新率。
24、为了获取对象信息,图像处理单元读取由传感器拍摄到的图像,并关于相对车辆固定的3d坐标系对所拍摄到的对象在其大小和定位、运动状态方面进行分析。为了对象检测,图像处理单元可以使用已知的图像处理方法,如sfm方法(英文:structure frommotion(从运动中提取结构)),利用该sfm方法可以通过将时间上错开地拍摄的图像叠加来获得3d信息;或帧差法(英文:frame differencing,帧间差分),利用该帧差法可以识别图像序列中对象的变化。
25、经压缩的对象信息被传输到电子控制单元,电子控制单元可以在数据输出侧以无线方式发送数据,并且在数据输入侧以无线或有线方式接收数据。
26、电子控制单元基本上作为信号放大器工作,并且可以独立于图像处理单元地被构造为分开的紧凑的构件,以及可以布置在挂车车辆上。因此,图像处理可以完全在挂车车辆上进行。因此,原则上不需要为了能够利用具有本发明的特征的驾驶员辅助系统而在牵引车辆上进行改装。
27、控制单元接收经压缩的对象信息,将这些经压缩的对象信息有利地整理成数据包并例如借助尽可能确保不间断的诸如udp(英文:user datagram protocol(用户数据报协议))那样的通信协议经由无线局域网(wlan)内的wi-fi无线接口或经由蓝牙连接对这些数据包进行发送。
28、数据包可以在牵引车的驾驶室之外或之内的终端设备上接收,例如在其上安装有为驾驶辅助系统所开发或改进的应用软件(app)的智能手机上接收。在该应用软件中,感测式地检测到的对象根据所传输的对象信息被可见地整理成空间或平面上的简单的几何图形并与挂车车辆联系起来。由此生成了可以在图形用户界面上或简单的显示屏上显示出的对用户友好的空间或平面的呈现。由于待传输的数据量的减少,使得显示可以快速且至少几乎无延迟地持续更新。
29、有可能且有利的是,控制单元在数据输入侧与车辆的现有的有线的总线系统联接,例如与can-5v总线联接。这种总线系统通常被安置在配备有电子制动系统(ebs)的挂车车辆上。在挂车车辆中也可以已经存在针对各种功能的信号传输以用于显示和控制挂车参数(如胎压、车桥载荷或水平调节)的控制单元。此类现有的控制单元必要时可以附加地被用于传输图像处理单元的对象信息,或者可以被扩展地构造。这尤其能够通过如下方式来实现,即,首先通过图像处理单元减少图像数据,从而可以使控制单元不超负荷。
30、根据具有本发明的特征的驾驶员辅助系统的第一实施方式,该驾驶员辅助系统被构造成用于作为倒车辅助系统来利用,并在对挂车进行调度时用于识别挂车后方和/或侧方的空间的障碍物。为此,在挂车的尾部处布置有至少一个光学或声学传感器,该光学或声学传感器以感测方式检测挂车后方和/或侧方的空间。与现有的倒车辅助系统相比,根据本发明的驾驶员辅助系统尤其通过如下方式扩展了识别可能性,即,可以向驾驶员三维显示具有相对于车辆的大小和定位的障碍物。由此方便了驾驶员对挂车进行朝后方指向的精确调度。
31、因此,可以在挂车车辆的后侧的端部处布置向后方、即朝倒车方向指向的光学或声学传感器。该传感器例如可以通过挂入倒挡地来激活,以便识别挂车的行驶路径中的障碍物。有利的是,该传感器被构造成,使其识别较大的水平的角度范围,即识别尽可能宽广地延伸至挂车的侧向区域中的很大的视场。
32、根据第二实施方式可以设置的是,驾驶员辅助系统可以被构造成用于作为载货空间监控系统来利用,并且用于监控挂车中的载货空间,其中,在载货空间内布置有至少一个光学或声学传感器。因此,可以在挂车的载货空间内安装有拍摄载货空间或货物的图像或图像序列的传感器。所拍摄的图像可以借助图像处理单元转换成图形简化的货物图像并显示出来。因此,驾驶员辅助系统可以具有用于观察后方空间的第一传感器和用于监控载货空间的第二传感器。
33、因此,根据本发明的驾驶员辅助系统既可以作为倒车辅助系统运行,也可以作为载货空间监控系统运行。原则上,载货空间监控和倒车辅助这二者可以利用驾驶员辅助系统并行运行,其中,适宜地,在倒车时优先运行倒车辅助,并且至少可以暂时中断载货空间监控系统。
34、根据本发明的另外的实施方式可以设置的是,电子控制单元布置在挂车的前部区域内,即靠近牵引车的驾驶室地布置。
35、有利的是,控制单元与电子的终端设备之间的无线信号路段保持得尽可能短。由此提高了向终端设备传输对象信息的可靠性。在倒车时,终端设备处于驾驶员的视场内,以此使得可以立即看到在终端设备的图形用户界面上显现的该障碍物。因此,终端设备通常布置牵引车的驾驶室内。对此替选地,如果终端设备是移动设备,则其在驾驶员对挂车进行遥控式调度时也可以位于牵引车的驾驶室之外。
36、根据本发明的驾驶员辅助系统的一个改进方案可以设置的是,该驾驶员辅助系统具有出自单幅摄像头、摄像机、tof摄像头、立体摄像头、雷达传感器、激光雷达传感器、超声波传感器的组中的至少一个光学或声学传感器。因此,可以根据观察功能和/或监控功能的要求,在驾驶员辅助系统中使用具有不同的物理测量原理的传感器。
37、在传感器的第一实施方案中,例如可以将具有鱼眼镜头(也就是:fisheye-objektiv)的广角摄像头用于倒车辅助系统。因此可以以超过180°的水平角度来检测挂车后方环境中的对象。
38、作为传感器的一个替选的实施方案,可以设置有立体摄像头。立体摄像头具有两个同步镜头,它们同时拍摄两幅半图像,并从中生成3d成像。由此可以实现更准确地确定所检测到的对象相对于车辆的定位。此外,还消除了沿倒退的挂车的运动线的死角,上述sfm方法就适用于此。
39、作为传感器的另一替选的实施方案,可以设置有tof摄像头。tof摄像头是采用飞行时间方法(tof;英文:time of flight)工作的3d摄像头。在此测量光脉冲的从摄像头到对象并又返回的光所需要的飞行时间。利用一次拍摄,就可以针对被照亮的场景中的每个像点分别准确获知其距离。
40、作为传感器的另外的替选的实施方案,可以设置有雷达传感器。雷达传感器发送经集束的电磁波作为雷达信号,并对从对象反射的回波进行评估,以便根据远近和角度对有关对象进行定方位,以及必要时对其进行鉴别。
41、作为传感器的附加的替选的实施方案,可以设置有激光雷达传感器(lidar:英文light detection and ranging(光探测和测距))。此类传感器根据类似于雷达传感器的工作原理进行工作,但使用的是激光束。这些传感器已被用于在自动化驾驶和/或无人驾驶领域中的车辆上。
42、作为传感器的另外的替选的实施方案,可以设置有超声波传感器。开头已经提及的zf公司(前wabco公司)的“tailguard”系统就使用了多个这种传感器以进行障碍物识别。
43、根据另外的实施方式可以设置的是,附加地布置人工光源,人工光源在拍摄图像或图像序列期间可以照亮光学传感器的视场。通过人工照亮传感器的视场,可以实现始终如一的高质量的拍摄,而与自然亮度的波动无关。
44、为了解决与方法相关的任务,设置一种用于控制商用车辆的挂车的驾驶员辅助系统的方法,其中,驾驶员辅助系统具有设备权利要求中至少一项的特征。
45、该方法的特征在于,
46、-在激活驾驶员辅助系统时,由至少一个光学或声学传感器拍摄受传感器观察或监控的空间的图像和/或图像序列,
47、-借助这些拍摄,由图像处理单元检测位于所观察或监测的空间中的对象,以及关于相对车辆固定的坐标系在对象的大小和定位方面以及可选地在对象的运动状态方面进行分析,
48、-由分析结果产生经压缩的对象信息,该对象信息包含每个被图像处理单元考虑到的对象的大小、定位以及可选地运动状态,
49、-经由电子控制单元将该对象信息传输到终端设备上,并且
50、-借助应用软件将传输到终端设备上的对象信息作为图形简化的、空间或平面的呈现成像在图形用户界面上,
51、-其中,该呈现包含了作为空间几何图形或作为平面几何图形的被检测的对象及这些对象的大小、定位和运动状态。
52、因此,在根据本发明的方法中,首先在图像处理单元中分析由传感器所拍摄的具有其中被检测到的对象的图像或图像序列,并作为经压缩的对象信息以有线方式例如经由挂车制动系统的现有的总线系统或以无线方式经由无线电链路传输至控制单元。控制单元充当信号放大器,该信号放大器将对象信息作为经整理并放大的信号经由无线电链路(例如通过wlan或蓝牙)传送给终端设备。
53、所检测到的对象作为空间几何图形(例如作为长方体、柱体、金字塔、球体或条带在空间呈现中)被可视化在终端设备的图形用户界面上。空间呈现涉及挂车车辆的固定的坐标系。在此,例如所呈现出的长方体在宽度、高度和深度方面的大小及其相对于挂车的定位与相关检测到的对象的尺寸或定位相应。
54、对此替选地,还能采用更进一步减少数据的呈现,在其中,为长方体或几何图形配属预定的统一大小。这种呈现对于驾驶员而言可以作为障碍物在挂车的后方的空间内位于何处的初始定向。在此有利的是,待传输的数据量相对较小,从而性能较低的数据连接就足够了。尤其是当使用现有的数字总线系统用于在图像处理单元与控制单元之间进行数据传输时,该总线系统只承受相对较低的负荷。
55、还有可能的是,将所提及的3d呈现简化为2d呈现。在此,取代空间图形地可以将简单的平面几何图形,如矩形、三角形、圆形、间隔条带或类似图形显示在用户界面上。
56、驾驶员辅助系统的激活可以自动地、受传感器控制地、受事件控制地或手动地来进行。
57、此外可以设置的是,驾驶员辅助系统作为倒车辅助系统工作,在对挂车进行调度时,该倒车辅助系统用于识别挂车的后方和/或侧方空间的障碍物,其中,光学或声学传感器的视场被分成不同优先级的子区域,并且其中,在每个子区域中分别考虑到了预定数量的与障碍物相关的对象。
58、因此有利的是,在进行调度时将挂车的后方空间分成若干区域,并将呈现减少到各自区域中的主要内容。由此实现了对呈现的很好的概览,并将待传输的数据量限制在必要的尺度。例如,可以将挂车后方的中央确认成高优先级的区域,在该区域内显示最高数量的被归类为相关的对象。可以给位于挂车斜后方的区域配属具有中等数量的被归类为相关的对象的中等优先级。可以给位于更远的区域配属仅具有较少被归类为相关的对象的低优先级。
59、也有可能的是,在向前行驶时附加地使用驾驶员辅助系统。如果传感器被布置成具有侧向视场,则在此也可以设置具有不同优先级的空间区域。例如,向前行驶时,将较低的优先级赋予车辆后方中央的区域,而位于车辆紧邻侧向的区域获得较高的优先级。此外,还可以对右边和左边的侧向的区域进行不同的加权,更确切地说依赖于操纵车辆的左转向灯还是右转向灯来进行。
60、根据本发明方法的另外的实施方式可以设置的是,在商用车辆可能与所推测的行驶路径中的障碍物发生后方碰撞的情况下,借助终端设备的应用软件来进行视觉、听觉和/或触觉上的碰撞警告,并借助挂车制动系统启动自动的紧急制动,以用于避免碰撞。
61、因此,在倒车期间,如果挂车的推测的行驶路径中突然出现障碍物,就可以预报可能的碰撞。如果碰撞被归类为非即刻发生,则可以首先触发警告级联。例如,可以通过如下方式进行视觉上的反馈,即,将在用户界面上显示的代表相关的对象的长方体着色成显眼的颜色,例如着色成红色和/或进行闪烁。
62、对此附加或替选地,可以在用户界面的边缘处显示红色边框,或背景完全以透明的红色着色。视觉上的警告的颜色以及听觉或触觉上的警告的强度可以根据危险程度而变化。例如,黄色可以表明视场内存在障碍物,而红色可以表明即将发生碰撞。警告音在其音调和/或其音量方面可以依赖于所识别到的危险而变化。如果碰撞被归类为即刻发生,则可以通过自动触发挂车制动器(如果存在电子制动系统的话)来避免或至少减弱这种碰撞。
63、根据本发明的另外的实施方式可以设置的是,在终端设备的图形用户界面上显现的几何图形和/或用户界面的边框和/或背景可以依赖于相关对象的大小、定位和/或运动状态以及依赖于碰撞警告地以不同的颜色和/或可变的颜色来成像。
64、因此,可以为几何图形的呈现设置和能选择不同的颜色模式。在最简单的情况下,可以将所有图形统一着色。例如,可以依赖于离挂车最近的对象的距离统一针对所有图形来改变颜色。根据颜色模式的改进方案,每个图形可以单独地并依赖于其当前在空间内的(朝挂车看)最外点进行颜色编码。
65、此外,可以分析所检测到的对象的运动状态。如果识别到相关对象正在实施自身运动,则可以通过不同的着色将该相关的对象与固定不动的对象区分开并突出强调。
66、根据本发明的另外的实施方式可以设置的是,在终端设备的图形用户界面上显示出被投影到所呈现的地面上的栅格或线条图案。
67、栅格或线条图案以及在其中成像的从以感测的方式检测到的对象中推导出的几何图形可以在理解所成像的场景的方面对驾驶员进行支持。因此,在倒车时,这可以为驾驶员在启动行驶调度时提供定向辅助。例如,可以将具有预定的固定的单元格大小的栅格投影到地面上并且使其在用户界面上可见,其中,每个单元格相应于所观察和监控的1m×1m的空间。对此替选地,线条图案可以投影到地面上,其中,所显示的线条的线条间距与所观察和监控的空间中关于挂车的特定的水平的等距间距相应。
68、根据本发明的另外的实施方式可以设置的是,在终端设备的图形用户界面上呈现真实的背景图像,并将代表所检测到的对象的几何图形投影进入到背景图像中。如果图像处理单元与电子控制单元之间以及电子控制单元与终端设备之间提供了高性能的数据连接,则因此也有可能将呈现被检测到的对象的几何图形投影进入到光学传感器的真实的背景图像中。
69、根据方法的另一改进方案,可以设置监护器功能,该监护器功能监控数据传输,并在识别到图像处理单元与电子控制单元之间和/或电子控制单元与终端设备之间的数据传输出现明显中断时产生警告报告。
70、已知的是,在驾驶员辅助系统中可能总是反复出现无线通信中断的情况。因此有利的是,将诊断工具整合到根据本发明的驾驶员辅助系统中,该诊断工具确认数据传输中的等待时间或间隙,以便确定延时的数据,或以便识别用户界面上显示的图像不反映当前状况。例如,这种诊断工具是已知的ip-ping方法,该ip-ping方法可以借助测试信号检查是否在网络中能达到具有ip地址的特定设备。如果识别到等待时间,则能够以智能手机app来产生警告,例如除了如“无数据”那样的提示文字外,还可以通过沿显示屏的边缘渐显黄色或红色的边框来示出。
71、适宜地,执行两次ping测试,以便区分一方面是图像处理单元与控制单元之间出现的等待时间以及另一方面是控制单元与终端设备之间出现的等待时间,以及在必要时分别显示相应的错误代码。在干扰频繁发生的情况下,可以对图像处理单元中的所拍摄的图像的压缩率进行适应性调整,从而在用户界面上产生细节较少但仍然足够的呈现。
72、根据方法的另一改进方案设置的是,驾驶员辅助系统作为载货空间监控系统进行工作,其中,监控货物占用、货物移位和/或占用变化并在终端设备的图形用户界面上将之示出。驾驶员辅助系统在此能够实现对挂车的载货空间中的货物的状态进行监控。例如,可以显示载货空间中的占用度或货物的分布。此外,可以通过比较时间上间隔开地拍摄到的载货空间的图像来识别出不期望的货物移位或与盗窃有关的货物移除,以及向驾驶员发信号告知。
73、根据本发明的另外的实施方式可以设置的是,驾驶员可以借助应用软件调整在终端设备的图形用户界面上的呈现的透视角度,或者可以在空间呈现与平面呈现之间进行选择以及切换。
74、最后,本发明还涉及具有挂车的商用车辆,商用车辆具有用于观察和/或监控位于驾驶室之后的空间的驾驶员辅助系统,驾驶员辅助系统根据设备权利要求中任一项地构建而成,并能用于执行根据方法权利要求中任一项的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表