一种远光近光一体灯控制系统的制作方法
- 国知局
- 2024-08-02 16:53:03
本发明涉及车灯,尤其是指一种远光近光一体灯控制系统。
背景技术:
1、车灯通常具有两个模式:近光模式与远光模式,近光模式主要在亮度较高的场合中使用,而远光模式则是在车少且亮度低的场合用。对于现有的车灯来说,存在两种结构:一种是同时具备近光光源和远光光源,另一种则是通过一个光源进行切换以实现近光与远光两种模式。
2、但无论是哪种方式,均具有以下不足:模式较为单一,即车灯只能够具有两种固定的射出角度以及亮度,无法根据实际应用场合调整出适合的射出角度以及亮度,导致部分车辆在市区等场合采用远光灯时,常会对前车或者对车造成非常不良的影响,严重的甚至会引起交通事故。
技术实现思路
1、本发明针对现有技术的问题提供一种远光近光一体灯控制系统,能够根据实际需要,调整车灯照射角度。
2、为了解决上述技术问题,本发明采用如下技术方案:
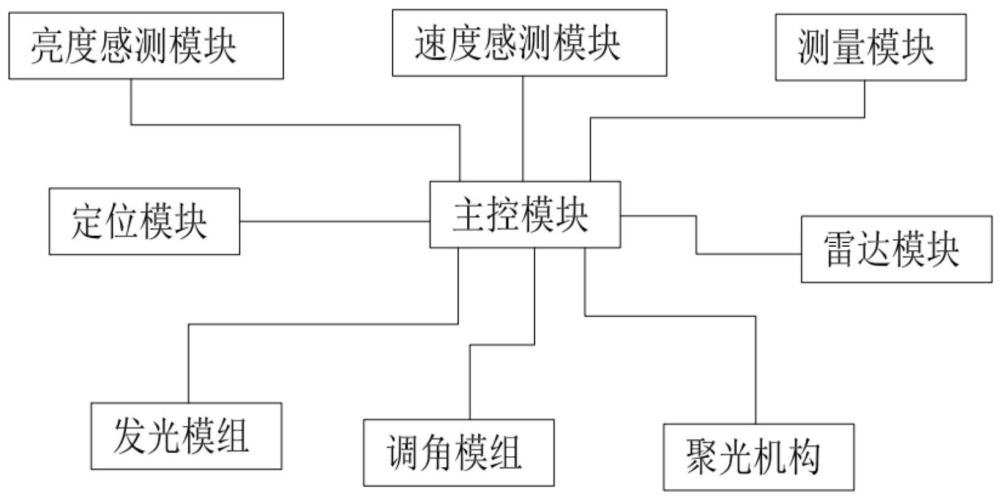
3、本发明提供的一种远光近光一体灯控制系统,应用于车辆,包括主控模块、均与主控模块信号连接的速度感测模块、雷达模块、定位模块以及亮度感测模块,
4、所述控制系统还包括以下步骤:
5、a.通过定位模块获取车辆所处的位置,根据车辆所处的位置控制车辆的车灯照明模式;
6、b.通过亮度感测模块获取车辆周围的环境亮度,根据环境亮度调整车辆的车灯照明亮度l;
7、c.通过速度感测模块获取车辆的行驶速度,通过雷达模块获取车辆的前方路况;
8、d.根据行驶速度、前方路况,调整车辆的车灯照射角度。
9、进一步的,所述定位模块为北斗装置,步骤a具体包括:
10、通过定位模块获取车辆的具体地理信息;
11、结合车辆的行驶路径,判断车辆所处的环境,其中所述环境包括市区以及快速路;
12、当车辆处于慢速路时,控制车灯照明模式锁定近光模式;
13、当车辆处于快速路时,根据快速路的路况,调整车灯照明模式。
14、更进一步的,所述调整车灯照明模式,具体包括:
15、判断当前快速路是否处于第一状态,所述第一状态包括:
16、(1)当地实时间为0-6点;
17、(2)当前快速路每百米的机动车的数量少于1;
18、判断当前快速路是否处于第二状态,所述第二状态包括:
19、(3)当前快速路无路灯,或路灯尚未开启;
20、(4)当地天气为恶劣天气;
21、当满足(1)或(2),且同时满足(3)或(4)时,控制车灯切换为智能调光模式并执行步骤c和d,否则控制车灯切换为近光模式。
22、更进一步的,提供一车灯,其包括灯体、均设置于灯体的透镜、发光模组以及调角模组,发光模组用于对灯体发射光线,调角模组用于调整发光模组所发射光线的角度;
23、步骤d具体包括:
24、d1.主控模块获取车辆的实际行驶速度v,若实际行驶速度v<60km/h时则执行步骤d2,若实际行驶速度v≥60km/h且保持超过时间t时则执行步骤d3;
25、d2.控制车灯照射角度θ保持为基准角度θ0;其中,所述基准角度θ0为50-55°;
26、d3.根据公式θ=θ0+k*(v-60)算出车灯照射角度θ,然后通过调角模组动作以调整发光模组射出的光线的角度,同时提升发光模组的照明亮度至l’;
27、其中,θ0≤θ≤90°,k为常数且0.3≤k≤0.8,5≤t≤10。
28、更进一步的,当实际行驶速度v>120km/h且保持超过时间t时,主控模块控制发光模组进行闪烁,同时调角模组动作以使得车灯照射角度θ=θ0。
29、更进一步的,主控模块预先储存有车灯照射角度θ与车距s之间的配对表;当实际行驶速度v≥60km/h时,还包括:
30、d31.主控模块获取车辆前方的是否存在目标,若存在目标则执行步骤d32,否则执行d34;
31、d32.获取车辆与目标之间的相对距离s’,根据相对距离s’匹配车灯照射角度θ’;
32、d33.当车灯照射角度θ=θ’时,车灯照射角度θ不随着实际行驶速度v的提升而变大;
33、d34.执行步骤d3。
34、更进一步的,在步骤d33中,当相对距离s’的数值变化大于(1±n)s’时,则重新执行步骤d32以获得新的车灯照射角度θ’;
35、其中,n为常数且0.1≤n≤0.2。
36、更进一步的,所述提升发光模组的照明亮度至l’,具体包括:
37、根据公式l’=l*θ’/θ,算出照明亮度l’的数值;
38、比较l’与发光模组的最大亮度之间lmax的大小,若l’小于lmax则车灯以l’进行照明;若l’≥lmax则发光模组以lmax进行照明;
39、当发光模组以lmax进行照明的时间超过预设时间t’时,则主控模块发送警示信号通知驾驶者。
40、更进一步的,所述车灯还包括聚光机构,聚光机构与主控模块电连接;
41、在步骤(4)中,恶劣天气包括雾天、雨天以及雪天;
42、当处于恶劣天气时,主控模块控制聚光机构伸出,以使得经透镜射出的光线聚拢至照向前方以提升照明效果。
43、更进一步的,所述主控模块连接有测量模块,
44、主控模块通过测量模块获取车辆周围的能见度,根据能见度控制聚光机构伸出以及控制发光模组提升照明亮度。
45、本发明的有益效果:本发明根据车速、车位置、周围亮度以及路况等多个因素,控制车灯以适合的照明模式、照明亮度以及照射角度进行发光,从而让车灯具有可靠的照明效果之余,不会对周围车辆造成过大的驾驶隐患。
技术特征:1.一种远光近光一体灯控制系统,应用于车辆,其特征在于:包括主控模块、均与主控模块信号连接的速度感测模块、雷达模块、定位模块以及亮度感测模块,
2.根据权利要求1所述的一种远光近光一体灯控制系统,其特征在于:所述定位模块为北斗装置,步骤a具体包括:
3.根据权利要求2所述的一种远光近光一体灯控制系统,其特征在于:所述调整车灯照明模式,具体包括:
4.根据权利要求3所述的一种远光近光一体灯控制系统,其特征在于:提供一车灯,其包括灯体、均设置于灯体的透镜、发光模组以及调角模组,发光模组用于对灯体发射光线,调角模组用于调整发光模组所发射光线的角度;
5.根据权利要求4所述的一种远光近光一体灯控制系统,其特征在于:当实际行驶速度v>120km/h且保持超过时间t时,主控模块控制发光模组进行闪烁,同时调角模组动作以使得车灯照射角度θ=θ0。
6.根据权利要求4所述的一种远光近光一体灯控制系统,其特征在于:主控模块预先储存有车灯照射角度θ与车距s之间的配对表;当实际行驶速度v≥60km/h时,还包括:
7.根据权利要求6所述的一种远光近光一体灯控制系统,其特征在于:在步骤d33中,当相对距离s’的数值变化大于(1±n)s’时,则重新执行步骤d32以获得新的车灯照射角度θ’;
8.根据权利要求6所述的一种远光近光一体灯控制系统,其特征在于:所述提升发光模组的照明亮度至l’,具体包括:
9.根据权利要求4所述的一种远光近光一体灯控制系统,其特征在于:所述车灯还包括聚光机构,聚光机构与主控模块电连接;
10.根据权利要求9所述的一种远光近光一体灯控制系统,其特征在于:所述主控模块连接有测量模块,
技术总结本发明涉及车灯技术领域,尤其是指一种远光近光一体灯控制系统,应用于车辆,包括主控模块、均与主控模块信号连接的速度感测模块、雷达模块、定位模块以及亮度感测模块,所述控制系统还包括以下步骤:A.通过定位模块获取车辆所处的位置,根据车辆所处的位置控制车辆的车灯照明模式;B.通过亮度感测模块获取车辆周围的环境亮度,根据环境亮度调整车辆的车灯照明亮度L;C.通过速度感测模块获取车辆的行驶速度,通过雷达模块获取车辆的前方路况;D.根据行驶速度、前方路况,调整车辆的车灯照射角度。本发明根据车速、车位置、周围亮度以及路况等多个因素,控制车灯以适合的照明模式、照明亮度以及照射角度进行发光。技术研发人员:玉宏模,蔡向荣受保护的技术使用者:东莞市荣海光电科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252904.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表