基于行为感知的无人驾驶道路智能自主避障方法及系统与流程
- 国知局
- 2024-08-02 17:05:29
本发明涉及智能驾驶,特别是涉及基于行为感知的无人驾驶道路智能自主避障方法及系统。
背景技术:
1、随着人工智能、计算机视觉、传感器技术等领域的飞速发展,无人驾驶技术也得到了迅速的发展。无人驾驶汽车通过搭载各种传感器,如激光雷达、摄像头、超声波传感器等,能够实时感知周围环境,为智能自主避障提供了基础。
2、如授权公告号为cn113031583b的中国专利公开了一种结构化道路避障方法,所述方法包括:获取车辆在实时行驶中的车辆位姿、行驶环境周围的障碍物状态信息以及参考路径信息,基于此,对当前车辆前方障碍物的可视点进行状态空间采样,确定每个采样点的位姿;以每个采样点的位姿作为终点状态并将当前车辆位姿作为初始状态,分别将当前车辆位姿与每个采样点的位姿进行连接,得到当前车辆相对于每个采样点的运动基元;构建包括路径平滑度、碰撞风险发生可能性和参考线路径跟随性的结构化道路代价函数,利用代价函数,选取最优运动基元并将其确定为针对当前障碍物的避障路径。该发明实现了无人矿卡在结构化道路行驶过程中的自主避障,提高了矿山的智能化程度,实现矿卡的自主安全作业。
3、如公开号为cn116360422a的中国专利申请公开了一种自动巡航智能避障小车的控制方法,将智能小车放置到交通沙盘的行驶道路上并采集实时的路况图像;该方法包括以下步骤:s1、对路况图像进行分析,识别道路上的物体的信息;s2、结合预存的各物体的真实高度,估算智能小车与各具有高度的物体的距离;s3、若识别的物体中存在红灯状态的交通信号灯或行人且与小车的距离小于对应的距离阈值,则转到s4,否则转到s5;s4、执行预设的等待策略;s5、若识别的物体中存在障碍物且与小车的距离小于预设的安全避让距离,则执行预设的避障驾驶策略;否则转到s6;s6、执行预设的自主巡航驾驶。该方法可以提升智能小车的智能化程度以及对交通事件的应变能力。
4、以上专利都存在本背景技术提出的问题:没有通过分析物体的运动状态、速度、加速度等参数,来推断物体的行为趋势;为解决这些问题,本发明提出了基于行为感知的无人驾驶道路智能自主避障方法及系统。
技术实现思路
1、针对现有技术的不足,本发明的主要目的是提供基于行为感知的无人驾驶道路智能自主避障方法及系统,能够有效解决背景技术中的问题。本发明的具体技术方案如下:
2、基于行为感知的无人驾驶道路智能自主避障方法,包括以下具体步骤:
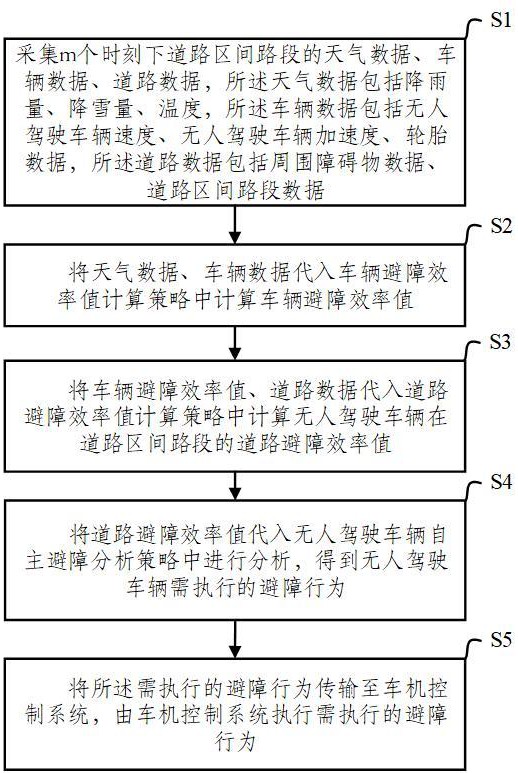
3、s1、采集m个时刻下道路区间路段的天气数据、车辆数据、道路数据,所述天气数据包括降雨量、降雪量、温度,所述车辆数据包括无人驾驶车辆速度、无人驾驶车辆加速度、轮胎数据,所述道路数据包括周围障碍物数据、道路区间路段数据;
4、s2、将天气数据、车辆数据代入车辆避障效率值计算策略中计算车辆避障效率值;
5、s3、将车辆避障效率值、道路数据代入道路避障效率值计算策略中计算无人驾驶车辆在道路区间路段的道路避障效率值;
6、s4、将道路避障效率值代入无人驾驶车辆自主避障分析策略中进行分析,得到无人驾驶车辆需执行的避障行为;
7、s5、将所述需执行的避障行为传输至车机控制系统,由车机控制系统执行需执行的避障行为。
8、具体的,所述轮胎数据包括:胎压、轮胎表面摩擦系数,所述周围障碍物数据包括:静止障碍物数据、移动障碍物数据,所述静止障碍物数据包括静止障碍物的数量,以及每个静止障碍物距离车辆的实时距离,所述移动障碍物数据包括移动障碍物的数量,以及每个移动障碍物的实时移动速度、距离车辆的实时距离。
9、具体的,所述道路区间路段数据为道路区间路段平均行程速度,所述道路区间路段平均行程速度的具体计算步骤为:
10、s11、获取在无人驾驶车辆驶入该道路区间路段前n个车辆的行驶数据,所述行驶数据包括n个车辆经过该道路区间路段所需时间,获取该道路区间路段的长度;
11、s12、所述道路区间路段平均行程速度,其中l为该道路区间路段的长度、为第i个车辆经过该道路区间路段所需时间,i为1至n中任一项。
12、具体的,所述s2中车辆避障效率值计算策略的具体计算步骤为:
13、s21、根据第j个时刻道路区间路段的降雨量、降雪量、温度,计算第j个时刻路面湿滑程度值,其中分别为降雨量影响系数、降雪量影响系数,且均大于等于0;max()表示取括号内最大值,r为第j个时刻的降雨量、s为第j个时刻的降雪量、t为第j个时刻的温度,分别为降雨量影响路面的阈值、降雪量影响路面的阈值;
14、s22、根据第j个时刻道路区间路段上无人驾驶车辆速度和无人驾驶车辆加速度计算第j个时刻无人驾驶车辆动态响应能力值,其中分别为速度影响系数、加速度影响系数,且均大于等于0;v为第j个时刻道路区间路段上无人驾驶车辆速度、a为第j个时刻道路区间路段上无人驾驶车辆加速度,为道路区间路段允许的最大车辆速度、为无人驾驶车辆的最大加速度;
15、s23、根据第j个时刻无人驾驶车辆的胎压和轮胎表面摩擦系数计算第j个时刻车辆抓地效率值,其中分别为胎压影响系数、轮胎摩擦影响系数,且均大于等于0;min()表示取括号内最小值,p为第j个时刻无人驾驶车辆的胎压、u为第j个时刻无人驾驶车辆的轮胎表面摩擦系数,为保障无人驾驶车辆行驶的最大胎压、为保障无人驾驶车辆行驶的最小胎压。
16、具体的,所述车辆避障效率值计算策略还包括:
17、计算第j个时刻的无人驾驶车辆避障效率值,其中分别为路面湿滑程度影响系数、车辆动态响应能力影响系数、车辆抓地效率影响系数,,且均大于0。
18、具体的,所述s3,包括以下具体步骤:
19、s31、获取第j个时刻以无人驾驶车辆为中心半径为r的圆形区域内静止障碍物的数量,以及每个静止障碍物距离车辆的实时距离,移动障碍物的数量,以及每个移动障碍物的实时移动速度、距离车辆的实时距离、道路区间路段平均行程速度以及第j个时刻的无人驾驶车辆避障效率值;
20、s32、则第j个时刻的无人驾驶车辆在道路区间路段的道路避障效率值,其中分别为静止障碍物影响系数、移动障碍物影响系数,且均大于等于0;lw为第j个时刻的无人驾驶车辆在道路区间路段已经行驶的距离,为第q个静止障碍物距离车辆的实时距离,为第j个时刻以无人驾驶车辆为中心半径为r的圆形区域内静止障碍物的数量,为第p个移动障碍物距离车辆的实时距离、实时移动速度,为第j个时刻以无人驾驶车辆为中心半径为r的圆形区域内移动障碍物的数量,q为1至中任一项,p为1至中任一项。
21、具体的,所述s4具体包括以下内容:
22、获取历史上m个时刻的无人驾驶车辆在道路区间路段的道路避障效率值,以及对应的避障行为,建立避障行为数据集,用于存储m个时刻的无人驾驶车辆在道路区间路段的道路避障效率值,以及对应的避障行为;所述无人驾驶车辆自主避障分析策略通过构建避障行为预测模型预测无人驾驶车辆需执行的避障行为,将避障行为数据集划分为避障行为训练集、避障行为测试集;构建行为预测模型,将避障行为训练集中所有时刻的道路避障效率值作为行为预测模型的输入,将避障行为训练集中所有时刻的道路避障效率值对应的避障行为作为行为预测模型的输出,对行为预测模型进行训练,得到初始避障行为预测模型;通过避障行为测试集对初始避障行为预测模型进行模型验证,输出大于等于预设模型准确度的初始避障行为预测模型作为避障行为预测模型。
23、具体的,基于行为感知的无人驾驶道路智能自主避障系统,其基于所述的基于行为感知的无人驾驶道路智能自主避障方法实现,所述系统包括以下模块:
24、数据采集模块,用于采集m个时刻下道路区间路段的天气数据、车辆数据、道路数据,所述天气数据包括降雨量、降雪量、温度,所述车辆数据包括无人驾驶车辆速度、无人驾驶车辆加速度、轮胎数据,所述道路数据包括周围障碍物数据、道路区间路段数据;
25、车辆避障效率值计算模块,用于将天气数据、车辆数据代入车辆避障效率值计算策略中计算车辆避障效率值;
26、道路避障效率值计算模块,用于将车辆避障效率值、道路数据代入道路避障效率值计算策略中计算无人驾驶车辆在道路区间路段的道路避障效率值;
27、避障行为分析模块,用于将道路避障效率值代入无人驾驶车辆自主避障分析策略中进行分析,得到无人驾驶车辆需执行的避障行为;
28、避障行为执行模块,用于将所述需执行的避障行为传输至车机控制系统,由车机控制系统执行需执行的避障行为;
29、控制模块,用于控制各个模块的运行。
30、与现有技术相比,本发明具有如下有益效果:
31、本发明采集天气数据、车辆数据、道路数据,将天气数据、车辆数据代入车辆避障效率值计算策略中计算车辆避障效率值;将车辆避障效率值、道路数据代入道路避障效率值计算策略中计算无人驾驶车辆在道路区间路段的道路避障效率值;将道路避障效率值代入无人驾驶车辆自主避障分析策略中进行分析,得到无人驾驶车辆需执行的避障行为;将所述需执行的避障行为传输至车机控制系统,由车机控制系统执行需执行的避障行为。本发明能够提高无人驾驶汽车在进行避障决策时的工作效率。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254032.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表