一种车辆载重测量方法及系统与流程
- 国知局
- 2024-08-02 17:05:26
本发明涉及新能源汽车,特别涉及一种车辆载重测量方法及系统。
背景技术:
1、随着科技的进步以及生产力的快速发展,新能源汽车技术也得到了快速的发展,并且已经逐渐得到了人们的认可,在人们的日常生活中得到普及,极大的方便了人们的生活。
2、其中,现有的新能源汽车主要以纯电动汽车以及插电式混合动力汽车为主,并且现有的新能源汽车在使用的过程中,需要定期对车辆的载重量进行检测,以保证车辆的正常运行和安全行驶。
3、进一步的,现有技术在对车辆的载重量进行检测的过程中,大部分通过单目视觉或者双目视觉技术来拍摄车辆的图像,以根据该图像来推测出车辆的载重量,然而,此种测量方式需要预先对大量的标注数据进行训练,从而需要算力强大的计算机设备,并且训练数据的质量和数量直接影响了模型的性能以及泛化能力,从而存在着一定的使用局限性,同时降低了测量的效率。
技术实现思路
1、基于此,本发明的目的是提供一种车辆载重测量方法及系统,以解决现有技术对车辆载重量的测量具有一定的局限性,导致降低了测量效率的问题。
2、本发明实施例第一方面提出了:
3、一种车辆载重测量方法,其中,所述方法包括:
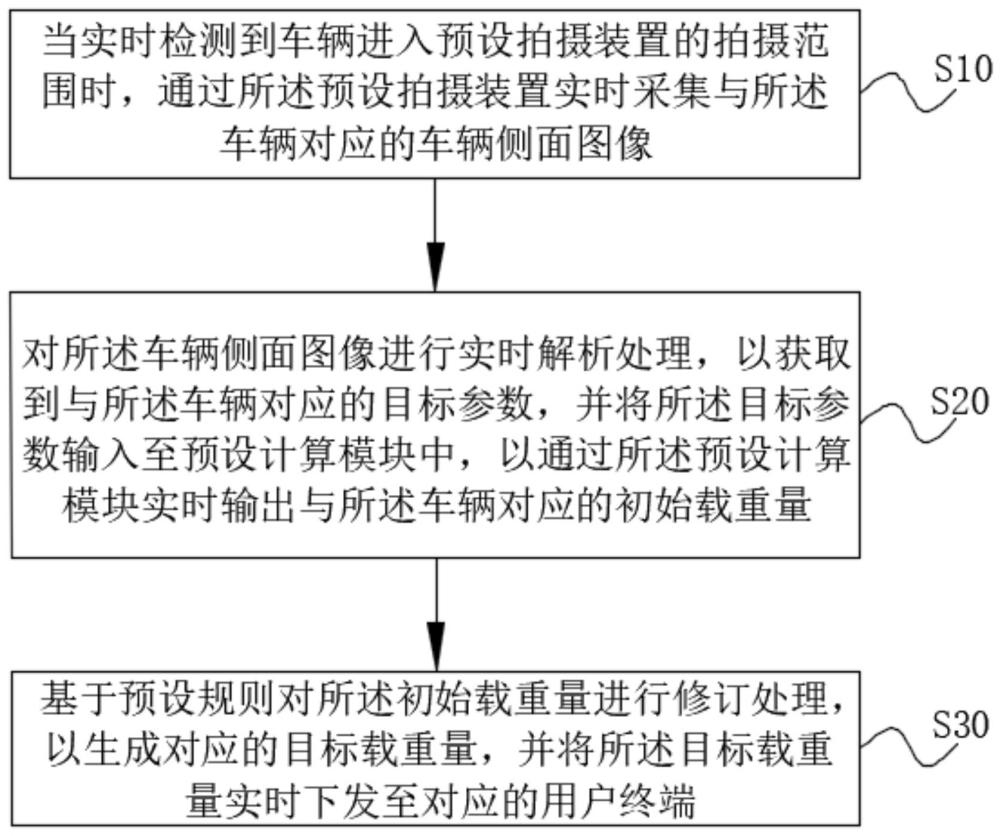
4、当实时检测到车辆进入预设拍摄装置的拍摄范围时,通过所述预设拍摄装置实时采集与所述车辆对应的车辆侧面图像;
5、对所述车辆侧面图像进行实时解析处理,以获取到与所述车辆对应的目标参数,并将所述目标参数输入至预设计算模块中,以通过所述预设计算模块实时输出与所述车辆对应的初始载重量;
6、基于预设规则对所述初始载重量进行修订处理,以生成对应的目标载重量,并将所述目标载重量实时下发至对应的用户终端。
7、本发明的有益效果是:通过实时采集与车辆对应的车辆侧面图像,就可以进一步解析出需要的目标参数,基于此,将当前目标参数输入至预先设置好的计算模块中,并进一步输出得到需要的初始载重量,基于此,最后只需要对当前初始载重量进行修订处理,就能够客观、快速、准确的得到与当前车辆对应的目标载重量,从而对应消除了测量的局限性,对应提升了测量效率。
8、进一步的,所述对所述车辆侧面图像进行实时解析处理,以获取到与所述车辆对应的目标参数的步骤包括:
9、当实时获取到所述车辆侧面图像时,对所述车辆侧面图像进行全局灰度处理,以生成对应的目标灰度图像;
10、对所述目标灰度图像进行全局扫描处理,以对应识别出所述目标灰度图像中包含的车辆图像区域以及非车辆图像区域;
11、在所述目标灰度图像中对应去除所述非车辆图像区域,并根据所述车辆图像区域对应获取到所述目标参数,所述目标参数包含有具体的数值。
12、进一步的,所述根据所述车辆图像区域对应获取到所述目标参数的步骤包括:
13、当实时获取到所述车辆图像区域时,实时描绘出与所述车辆图像区域对应的轮廓线;
14、根据所述轮廓线对应提取出与所述车辆对应的目标车辆形状,并根据所述目标车辆形状实时检测出与所述车辆对应的车辆自身重量、车轮数量以及车轮直径;
15、对所述车辆自身重量、所述车轮数量以及所述车轮直径进行整合处理,以对应生成所述目标参数。
16、进一步的,所述将所述目标参数输入至预设计算模块中,以通过所述预设计算模块实时输出与所述车辆对应的初始载重量的步骤包括:
17、当获取到所述目标参数时,在所述预设计算模块中实时调出与所述目标参数适配的第一算法;
18、将所述目标参数对应输入至所述第一算法中,以实时输出与所述车辆对应的初始载重量,所述第一算法的表达式为:
19、s=10*a+20*b+30*c+40
20、其中,s表示所述初始载重量,a表示所述车辆自身重量,b表示所述车轮数量,c表示所述车轮直径。
21、进一步的,所述基于预设规则对所述初始载重量进行修订处理,以生成对应的目标载重量的步骤包括:
22、当实时获取到所述初始载重量时,通过预设雷达实时检测出与所述车辆对应的车辆高度;
23、在预设计算模块中实时调出与所述车辆高度适配的第二算法,并将所述初始载重量以及所述车辆高度同时输入至所述第二算法中,以对应生成所述目标载重量,所述第二算法的表达式为:
24、y=1000/d+k*s
25、其中,y表示所述目标载重量,d表示所述车辆高度,s表示所述初始载重量,k表示载重系数。
26、进一步的,所述方法还包括:
27、当获取到所述车辆高度时,在所述预设计算模块中调出第三算法,并通过所述第三算法以及所述车辆高度对所述车辆进行稳定性分析,以输出对应的稳定值,所述第三算法的表达式为:
28、x=0.1*d+e
29、其中,x表示所述稳定值,d表示所述车辆高度,e表示稳定系数。
30、进一步的,所述方法还包括:
31、当实时获取到所述目标载重量以及所述稳定值时,将所述目标载重量以及所述稳定值实时显示在所述车辆的仪表盘上,并在所述仪表盘上实时发出对应的提示信息。
32、本发明实施例第二方面提出了:
33、一种车辆载重测量系统,其中,所述系统包括:
34、检测模块,用于当实时检测到车辆进入预设拍摄装置的拍摄范围时,通过所述预设拍摄装置实时采集与所述车辆对应的车辆侧面图像;
35、解析模块,用于对所述车辆侧面图像进行实时解析处理,以获取到与所述车辆对应的目标参数,并将所述目标参数输入至预设计算模块中,以通过所述预设计算模块实时输出与所述车辆对应的初始载重量;
36、处理模块,用于基于预设规则对所述初始载重量进行修订处理,以生成对应的目标载重量,并将所述目标载重量实时下发至对应的用户终端。
37、进一步的,所述解析模块具体用于:
38、当实时获取到所述车辆侧面图像时,对所述车辆侧面图像进行全局灰度处理,以生成对应的目标灰度图像;
39、对所述目标灰度图像进行全局扫描处理,以对应识别出所述目标灰度图像中包含的车辆图像区域以及非车辆图像区域;
40、在所述目标灰度图像中对应去除所述非车辆图像区域,并根据所述车辆图像区域对应获取到所述目标参数,所述目标参数包含有具体的数值。
41、进一步的,所述解析模块还具体用于:
42、当实时获取到所述车辆图像区域时,实时描绘出与所述车辆图像区域对应的轮廓线;
43、根据所述轮廓线对应提取出与所述车辆对应的目标车辆形状,并根据所述目标车辆形状实时检测出与所述车辆对应的车辆自身重量、车轮数量以及车轮直径;
44、对所述车辆自身重量、所述车轮数量以及所述车轮直径进行整合处理,以对应生成所述目标参数。
45、进一步的,所述解析模块还具体用于:
46、当获取到所述目标参数时,在所述预设计算模块中实时调出与所述目标参数适配的第一算法;
47、将所述目标参数对应输入至所述第一算法中,以实时输出与所述车辆对应的初始载重量,所述第一算法的表达式为:
48、s=10*a+20*b+30*c+40
49、其中,s表示所述初始载重量,a表示所述车辆自身重量,b表示所述车轮数量,c表示所述车轮直径。
50、进一步的,所述处理模块具体用于:
51、当实时获取到所述初始载重量时,通过预设雷达实时检测出与所述车辆对应的车辆高度;
52、在预设计算模块中实时调出与所述车辆高度适配的第二算法,并将所述初始载重量以及所述车辆高度同时输入至所述第二算法中,以对应生成所述目标载重量,所述第二算法的表达式为:
53、y=1000/d+k*s
54、其中,y表示所述目标载重量,d表示所述车辆高度,s表示所述初始载重量,k表示载重系数。
55、进一步的,所述车辆载重测量系统还包括分析模块,所述分析模块具体用于:
56、当获取到所述车辆高度时,在所述预设计算模块中调出第三算法,并通过所述第三算法以及所述车辆高度对所述车辆进行稳定性分析,以输出对应的稳定值,所述第三算法的表达式为:
57、x=0.1*d+e
58、其中,x表示所述稳定值,d表示所述车辆高度,e表示稳定系数。
59、进一步的,所述车辆载重测量系统还包括提示模块,所述提示模块具体用于:
60、当实时获取到所述目标载重量以及所述稳定值时,将所述目标载重量以及所述稳定值实时显示在所述车辆的仪表盘上,并在所述仪表盘上实时发出对应的提示信息。
61、本发明实施例第三方面提出了:
62、一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上面所述的车辆载重测量方法。
63、本发明实施例第四方面提出了:
64、一种可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现如上面所述的车辆载重测量方法。
65、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/254026.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。