道路行驶环境智能维持系统的制作方法
- 国知局
- 2024-08-02 17:06:40
本发明涉及交通管理领域,尤其涉及一种道路行驶环境智能维持系统。
背景技术:
1、救护车,是指救助病人的车辆。而车身上的“ambulance”是反过来写的,这是为了让前面的汽车司机通过后视镜直接看到正方向的ambulance单词,从而迅速让道。伴随着警示灯的闪烁和警报器的呼啸声,毫无疑问,一辆救护车正赶往一个紧急呼叫的事故现场。所有的交通要道都需要为它放行,司机可以在车行道边缘、人行道,甚至反方向上行驶——任何地方都行,只要救护车能通过,像奔赴火灾现场的消防员一样,救护人员也需要分秒必争,因为这可能意味着生死之差。
2、但是,对于自动驾驶车辆而言,缺乏针对救护车检测的自动驾驶机制,无法触发与周围最近对象保持设定距离以上的安全距离设置操作,从而实现对周围救护车对象的有效规避,另外,如果一直保持着上述规避控制模式,也会对自动驾驶车辆的内部能量造成不小的损耗。
技术实现思路
1、为了解决相关领域的技术问题,本发明提供了一种道路行驶环境智能维持系统,能够在自动驾驶车辆内引入规避机制,在智能检测到附近存在救护车对象时,触发与周围最近车辆保持设定距离以上的安全距离设置操作,从而实现对周围救护车对象的有效规避,其中,仅仅在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,方执行对汽车尾部环境的实时画面捕获操作,从而减少系统功耗的浪费。
2、根据本发明,提供了一种道路行驶环境智能维持系统,所述系统包括:
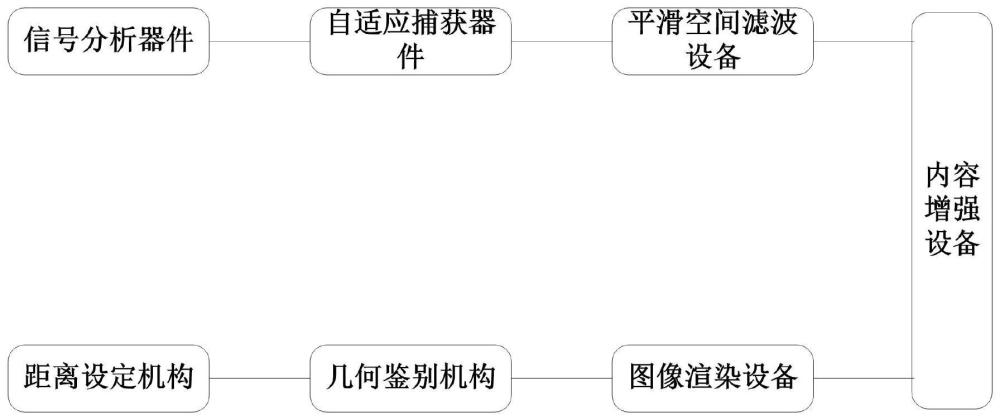
3、信号分析器件,设置在汽车尾部,用于在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,发出第一分析命令,否则,发出第二分析命令;
4、自适应捕获器件,设置在汽车尾部且与所述信号分析器件连接,用于在接收到所述第一分析命令时,执行对汽车尾部环境的实时画面捕获操作,以获得并输出对应的自适应捕获画面;
5、平滑空间滤波设备,与所述自适应捕获器件连接,用于对接收到的自适应捕获画面执行平滑空间滤波处理,以获得并输出相应的平滑空间滤波图像;
6、内容增强设备,与所述平滑空间滤波设备连接,用于对接收到的平滑空间滤波图像执行基于对数变换的图像内容增强处理,以获得并输出相应的内容增强图像;
7、图像渲染设备,与所述内容增强设备连接,用于对接收到的内容增强图像执行图像渲染处理,以获得并输出相应的当前渲染图像;
8、几何鉴别机构,与所述图像渲染设备连接,用于检测当前渲染图像中每一个车辆所在的图像区域的多个几何特征,所述多个几何特征包括对应图像区域的长度方向的像素点数量、宽度方向的像素点数量以及区域边沿曲线的最大曲率和最小曲率,将每一个车辆所在的图像区域的多个几何特征、救护车对应的标准图像的多个几何特征、所述当前渲染图像的信噪比以及所述当前渲染图像的背景区域占据的面积比率输入到卷积神经网络模型并运行所述卷积神经网络模型,以确定每一个车辆所在的图像区域是否存在救护车,并在所述当前渲染图像中的各个车辆分别所在的各个图像区域都不存在救护车时,发出对象未鉴别信号,否则,发出对象鉴别信号;
9、距离设定机构,与所述几何鉴别机构连接,用于在接收到所述对象鉴别信号时,触发与周围最近车辆保持设定距离以上的安全距离设置操作。
10、由此可见,本发明主要具备以下几处显著的技术效果:
11、第一处:检测当前渲染图像中每一个车辆所在的图像区域的多个几何特征,所述多个几何特征包括对应图像区域的长度方向的像素点数量、宽度方向的像素点数量以及区域边沿曲线的最大曲率和最小曲率,将每一个车辆所在的图像区域的多个几何特征、所述当前渲染图像的信噪比以及所述当前渲染图像的背景区域占据的面积比率输入到卷积神经网络模型并运行所述卷积神经网络模型,以确定每一个车辆所在的图像区域是否存在设定对象,并在所述当前渲染图像中的各个车辆分别所在的各个图像区域都不存在设定对象时,发出对象未鉴别信号;
12、第二处:在接收到表示附近存在救护车对象的对象鉴别信号时,触发与周围最近车辆保持设定距离以上的安全距离设置操作,从而实现对周围救护车对象的有效规避;
13、第三处:仅仅在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,方执行对汽车尾部环境的实时画面捕获操作,从而减少系统功耗的浪费。
14、本发明的道路行驶环境智能维持系统运行智能、灵活可控。由于能够在自动驾驶车辆内引入规避机制,并在智能检测到附近存在救护车对象时,触发与周围最近车辆保持设定距离以上的安全距离设置操作,以及仅仅在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,方执行救护车对象的智能检测,从而兼顾救护车智能规避和系统功耗节省。
技术特征:1.一种道路行驶环境智能维持系统,其特征在于,所述系统包括:
2.如权利要求1所述的道路行驶环境智能维持系统,其特征在于:
3.如权利要求2所述的道路行驶环境智能维持系统,其特征在于,所述系统还包括:
4.如权利要求2所述的道路行驶环境智能维持系统,其特征在于,所述系统还包括:
5.如权利要求2-4任一所述的道路行驶环境智能维持系统,其特征在于:
6.如权利要求5所述的道路行驶环境智能维持系统,其特征在于:
7.如权利要求5所述的道路行驶环境智能维持系统,其特征在于:
8.如权利要求5所述的道路行驶环境智能维持系统,其特征在于:
9.如权利要求5所述的道路行驶环境智能维持系统,其特征在于:
技术总结本发明涉及一种道路行驶环境智能维持系统,所述系统包括:信号分析器件,设置在汽车尾部,用于在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,发出第一分析命令;距离设定机构,用于在接收到对象鉴别信号时,触发与周围最近车辆保持设定距离以上的安全距离设置操作。本发明的道路行驶环境智能维持系统运行智能、灵活可控。由于能够在自动驾驶车辆内引入规避机制,并在智能检测到附近存在救护车对象时,触发与周围最近车辆保持设定距离以上的安全距离设置操作,以及仅仅在感应到汽车尾部所在的交通环境存在救护车蜂鸣声对应频率的声音信号时,方执行救护车对象的智能检测,从而兼顾救护车智能规避和系统功耗节省。技术研发人员:孙友谊,于曼丽,刘文,蔡文文受保护的技术使用者:温州市蓝慧科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/254181.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表