柔性附着探测器地面试验主动重力卸载方法与流程
- 国知局
- 2024-08-01 05:23:52
本发明涉及柔性附着探测器地面试验主动重力卸载方法,属于地外探测。
背景技术:
0、技术背景
1、近年来,小天体附着和采样返回任务具有重大的科学意义和工程价值,成为研究热点。小天体质量轻,引力弱,附着过程中极易发生反弹,导致任务失败。为了主动适应较大附着速度,避免探测器反弹,需设计具有阻尼小、柔性大及可变形吸能等特点的柔性附着探测器。在空间附着弱引力场环境下,柔性结构受到推力等扰动作用时,容易产生复杂变形与振动,对控制稳定性和精度影响大,因此地面试验验证需要实现弱引力环境下探测器柔性特性的模拟。目前实验室常用的重力卸载方法有气浮法、磁悬浮法和悬吊法等,气浮法和磁悬浮法难满足结构大变形需求;气球悬吊方式较难实现多节点恒力卸载。柔性附着探测器频率低、静态变形大,要求重力卸载装置既能在有限范围内实现低频运动,又能补偿结构的大变形。基于此,提出了一种柔性附着探测器地面试验主动重力卸载方法。
技术实现思路
1、为了解决弱引力环境下探测器柔性特性的模拟问题,本发明的目的是提供一种柔性附着探测器地面试验主动重力卸载方法,构建重力卸载试验系统,电机分别连接柔性杆质心和节点质心,根据静态平衡方程计算确定每个电机需要产生的力,电机产生的力通过悬吊绳、电机和滑轮组传动动态卸载作用在柔性附着探测器上的重力,完成柔性附着探测器地面试验的重力定量精准卸载,实现柔性附着结构动力学特性的真实模拟。
2、本发明的目的是通过下述技术方案实现的。
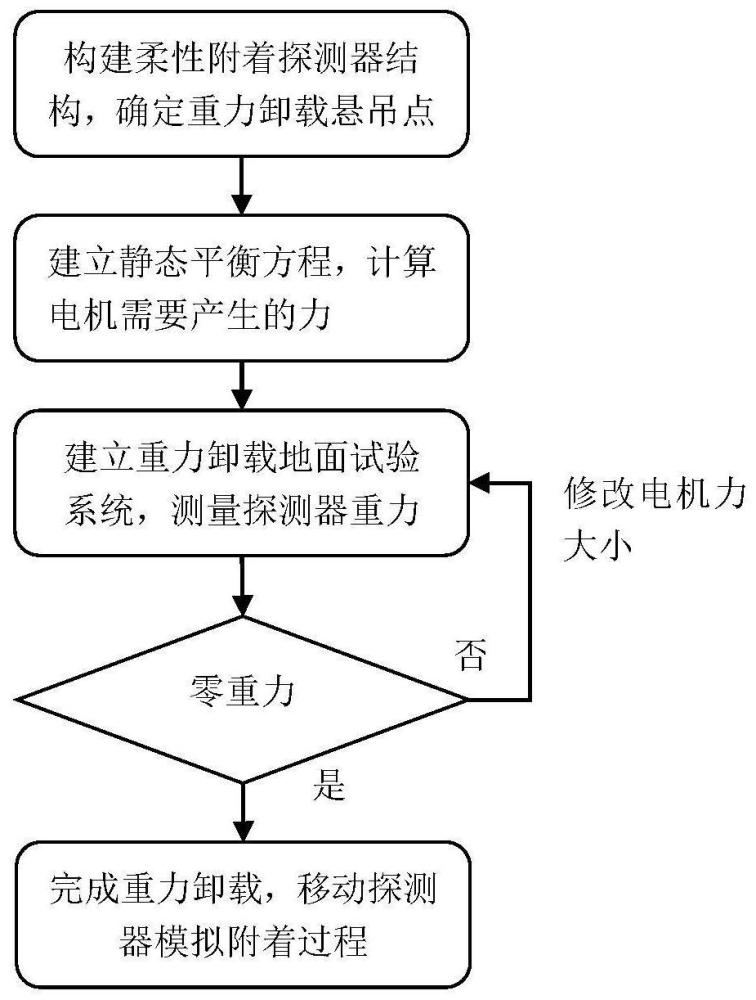
3、本发明公开的柔性附着探测器地面试验主动重力卸载方法,包括如下步骤:
4、步骤1:构建柔性附着探测器结构。柔性附着探测器包括本体承重板、缓冲筒和缓冲支架刚体结构,以及柔性连接结构。
5、本体承重板用于承载设备,所述设备包括探测器敏感器和计算单元。本体承重板为圆形刚性板,四周含有转动副结构。
6、缓冲筒主要由滚筒外壳、内胆和管路组成。滚筒外壳主要由安装在端盖上的轴承座、封面和轴承构成。内胆主要由防振垫、弹簧和减震垫组成,用于将外力传递到滚筒上,并通过减震垫将滚筒缓冲。管路用于将压缩空气输送到滚筒内部,通过压缩空气实现对外力的缓冲。
7、缓冲支架为环形结构,缓冲筒与缓冲支架之间由移动副连接。附着过程中缓冲支架受压运动,从而引起缓冲支架冲击和震动传递到缓冲筒上,实现附着过程中缓冲。
8、柔性连接结构主要由柔性梁组成,柔性梁前后端分别设有转动副结构,柔性梁以转动副连接承重板与缓冲桶,且转动关节处分别由弹簧相连接。
9、通过设置本体承重板的转动副连接结构、缓冲筒、缓冲支架和柔性连接结构的位置构型,实现柔性附着探测器稳定。
10、步骤2:在重力作用下,柔性附着探测器的静态变形很大,直接悬吊很难实现点头振动。为卸载柔性附着探测器的重力,信号发生器输出电压驱动电流功放,电流功放输出电流驱动电机,电机驱动绳索吊起柔性附着探测器。柔性附着探测器的力系主要由重力、摩擦力、电机输出力组成,当力系达到平衡时,静态平衡方程为:
11、
12、式中:nx表示柔性附着探测器水平方向力,ny表示柔性附着探测器垂直方向力,mnode和mlink分别表示柔性附着探测器连杆和节点质量,fnode和flink分别表示不同悬吊位置电机输出力,g表示重力加速度。
13、通过求解静态平衡方程,得到悬吊点的绳索张力,即确定每个电机需要产生的力大小。
14、步骤3:建立柔性附着探测器重力卸载地面试验系统。试验系统包括支撑装置,运动装置和控制系统。
15、支撑装置由高强硬度横梁和移动底架组成,主要用于为运动装置提供支撑平台,实现微重力模拟装置的移动。
16、运动装置包含连接梁和导轨系统,连接梁用以连接导轨与支撑装置,保持导轨稳定。导轨由悬吊绳、电机和滑轮组三部分组成,实现平动+转动部件在平面运动,悬吊绳分别连接探测器柔性梁质心和节点质心,通过滑轮组与电机相连,通过悬吊绳、电机和滑轮组传动实现重力补偿。滑轮组保证电机远离探测器所在区域。
17、控制系统包含拉力传感器、激光位移传感器和控制计算机。拉力传感器测量悬吊绳拉力大小,激光位移传感器检测柔性附着探测器位移,评估重力卸载效果,控制计算机通过输入拉力大小和探测器位移,控制电机力大小,并显示力、位移各项试验参数,根据步骤2计算静态平衡方程得出最优电机输出力,实现柔性附着探测器地面试验的重力卸载,进而实现柔性附着结构动力学特性的真实模拟。
18、作为优选,柔性附着探测器采用3节点构型,包含1个本体承重板、3个缓冲筒与3个缓冲支架刚体结构,以及3套柔性连接结构。
19、本体承重板四周含有3个转动副结构。
20、作为优选,悬吊绳分别连接柔性附着探测器的3个柔性梁质心和3个节点质心,通过6套滑轮组与6个音圈电机相连。
21、有益效果:
22、1、本发明公开的柔性附着探测器地面试验主动重力卸载方法,电机分别连接柔性杆质心和节点质心,根据静态平衡方程计算,确定每个电机需要产生的力,通过悬吊绳、电机和滑轮组传动动态卸载作用在柔性附着探测器上的重力,实现柔性附着探测器地面试验的重力定量精准卸载,实现柔性附着结构动力学特性的真实模拟。
23、2、本发明公开的柔性附着探测器地面试验主动重力卸载方法,通过多节点卸载重力,既能在有限范围内实现低频运动,又能补偿结构的大变形。
24、3、由于地外环境存在弱引力特性,本发明公开的柔性附着探测器地面试验主动重力卸载方法,不仅适用于弱引力天体探测任务中,也适用于微重力空间环境任务。
25、4、本发明公开的柔性附着探测器地面试验主动重力卸载方法,设计柔性附着探测器具有变形吸能的特点,有效释放附着过程星表对探测器的冲击力,避免探测器反弹。
技术特征:1.柔性附着探测器地面试验主动重力卸载方法,其特征在于:包括如下步骤,
2.如权利要求1所述的柔性附着探测器地面试验主动重力卸载方法,其特征在于:柔性附着探测器采用3节点构型,包含1个本体承重板、3个缓冲筒与3个缓冲支架刚体结构,以及3套柔性连接结构;
3.如权利要求1或2所述的柔性附着探测器地面试验主动重力卸载方法,其特征在于:悬吊绳分别连接柔性附着探测器的3个柔性梁质心和3个节点质心,通过6套滑轮组与6个音圈电机相连。
技术总结本发明公开的柔性附着探测器地面试验主动重力卸载方法,属于地外探测技术领域。本发明实现方法为:构建柔性附着探测器结构。柔性附着探测器包括本体承重板、缓冲筒和缓冲支架刚体结构,以及柔性连接结构。电机分别连接柔性杆质心和节点质心,根据静态平衡方程计算确定每个电机需要产生的力。建立柔性附着探测器重力卸载地面试验系统。试验系统包括支撑装置,运动装置和控制系统。电机产生的力通过悬吊绳、电机和滑轮组传动动态卸载作用在柔性附着探测器上的重力,完成柔性附着探测器地面试验的重力定量精准卸载,实现柔性附着结构动力学特性的真实模拟。本发明通过多节点卸载重力,既能在有限范围内实现低频运动,又能补偿结构的大变形。技术研发人员:高锡珍,黄翔宇,徐超,王大轶,史纪鑫,朱圣英,崔平远受保护的技术使用者:北京控制工程研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219522.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。