一种用于多场景吊运的模块化组合的旋翼无人机
- 国知局
- 2024-08-01 05:49:23
本技术属于无人机,具体涉及一种用于多场景吊运的模块化组合的旋翼无人机。
背景技术:
1、新一代的无人机具备更强大的电池寿命、更高的升降能力以及更先进的飞行控制系统,使得无人机被用于多种场景及多种载荷的吊运。吊运无人机已经在多个应用领域取得成功,包括建筑和施工、农业、救援和紧急响应、电力线维护、物流和货物运输等。它们可以用于运送货物、设备、传感器、摄像机等,无需人员直接参与。
2、然而,随着该技术的不断发展和应用场景的多样化,吊运的需求也在不断演变。吊运无人机的负重能力因型号和设计而异,一些大型工业级无人机可以携带数百千克的负载,而小型消费级别的无人机则只能携带几千克的负载。这取决于无人机的尺寸、动力系统和结构,而吊运的载荷形态也往往多变,这导致一款无人机所能针对的吊运载荷种类有限,若需要对特殊形状尺寸载荷的货物进行吊运,则需要对无人机结构进行重新设计。
3、目前,四旋翼无人机由于其出色的稳定性,可靠性及智能化程度,其构型仍然是最受各领域欢迎的机型,目前市面上已有多款用于吊运的四旋翼无人机出现,如djiflycart30等。然而,由于吊运采用的式是载荷与无人机机体的软连接,四旋翼机能够通过一定的消摆算法等对吊运载荷的稳定性进行一定的控制,然而,软绳的连接使得机体本身对载荷的运动模态,姿态,朝向等不具备控制能力,这使得使用四旋翼机型进行一些特殊形状物件进行吊运,或通过复杂环境时回会遭遇诸多困难,例如,进行长杆型物件的吊运时,长杆的指向无法进行控制,使得其在空中可能出现异常的摆动,影响飞行安全,同时在穿越复杂环境时,如城市低空,不受控的长杆摆动有可能造成周边物件损坏,或使得飞行器难以通过一些较为狭窄的地形。虽然,可以通过使用两个四旋翼运载系统的配合解决长杆型载荷的挂载问题,但将双四旋翼运用至普通方正型或球型载荷的挂载时,又会造成冗余,同时使得挂载后的整体包络面更大(两个旋翼机需要保持一定安全距离)。
技术实现思路
1、本实用新型的目的是针对上述问题,提供一种高可靠性,高稳定性的用于多场景吊运的模块化组合的旋翼无人机。
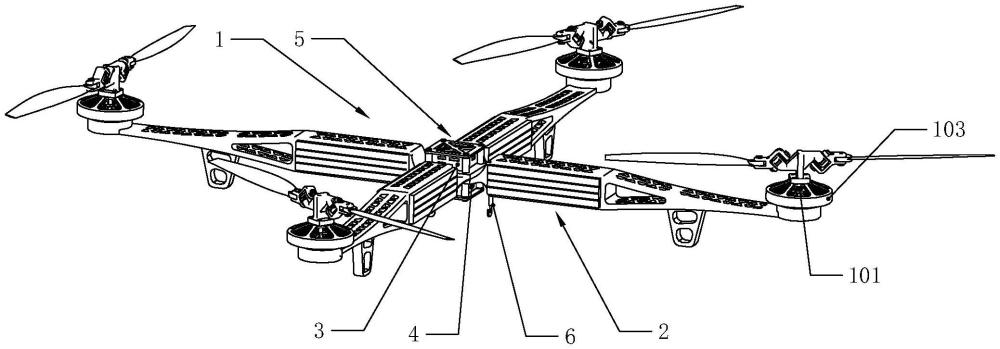
2、为解决上述技术问题,本实用新型的技术方案是:一种用于多场景吊运的模块化组合的旋翼无人机,包括一号机体、二号机体和电磁铁磁吸装置,一号机体和二号机体通过磁铁磁吸装置垂直交叉对接组合而成,一号机体上安装有一号控制器,二号机体上安装有二号控制器,一号控制器和二号控制器通过蓝牙连接,一号机体和二号机体的中部均安装有吊运挂钩和电池,两个吊运挂钩之间通过吊运缆绳相连,吊运缆绳上安装有载荷,电池与对应的控制器和电磁铁磁吸装置电连接,运挂钩配合吊运缆绳进行货物吊运。
3、优选地,所述一号机体包括一号机主体,一号机主体的两端安装有一号机体电机、无斜盘装置和叶片,一号机体电机的转轴端通过无斜盘装置与叶片相连。
4、优选地,所述无斜盘装置包括无斜盘装置主体和无斜盘装置连接块,无斜盘装置连接块对称的分布在无斜盘装置主体的两端,无斜盘装置主体呈“s”形结构,无斜盘装置主体的两端设有无斜盘装置主体通孔,无斜盘装置主体的底部向外凸出形成截面为矩形状的无斜盘装置主体连接块;无斜盘装置连接块为折弯结构,无斜盘装置连接块的两端分别设有无斜盘装置连接块第一凹槽和无斜盘装置连接块第二凹槽,无斜盘装置连接块的两端分别设有无斜盘装置连接块第一通孔和无斜盘装置连接块第二通孔,无斜盘装置连接块第一通孔贯穿无斜盘装置连接块第一凹槽,无斜盘装置连接块第二通孔贯穿无斜盘装置连接块第二凹槽,无斜盘装置主体的端部位于无斜盘装置连接块第一凹槽内,并通过螺栓依次穿过无斜盘装置连接块第一通孔和无斜盘装置主体通孔进行固连,叶片的端部位于无斜盘装置连接块第二凹槽内,螺栓依次穿过无斜盘装置连接块第二通孔和叶片的端部,进而将无斜盘装置连接块与叶片固连。
5、优选地,所述一号机体电机的电机端与一号机主体固连,一号机体电机的转轴端套设有电机连接块,电机连接块为回转体结构,电机连接块的截面为梯形状,电机连接块的顶部与无斜盘装置主体连接块通过螺栓固连,电机连接块的中部与一号机体电机的转轴端固连。
6、优选地,所述一号机主体包括依次固连为一体结构的一号机主体连接板、一号机主体固定杆、一号机主体连接杆和一号机主体支撑块,一号机主体连接板的截面为“工”字形,一号机主体连接板的两边对称依次固连有一号机主体固定杆和一号机主体连接杆,一号机主体支撑块位于一号机主体连接杆的底部,一号机体电机位于一号机主体连接杆的端部。
7、优选地,所述一号机主体连接板上安装有一号控制器和电磁铁磁吸装置,电磁铁磁吸装置为柱体状结构电磁铁,电磁铁磁吸装置的顶部安装有电磁铁固定板,电磁铁磁吸装置的数量为四个且呈“口”字形布置,一号控制器位于四个电磁铁磁吸装置之间,电磁铁固定板用于对一号控制器进行限位,从而使得一号控制器不会脱落。
8、优选地,所述一号机主体固定杆为长方体结构,一号机主体固定杆的中间开设有一号机主体固定杆通孔,电池安装在一号机主体固定杆通孔内。
9、优选地,所述一号机主体连接杆的截面为三角形结构。
10、优选地,所述一号机主体支撑块的截面为梯形结构。
11、优选地,所述二号机体的结构与一号机体的结构相同。
12、本实用新型的有益效果是:
13、1、本实用新型所提供的一种用于多场景吊运的模块化组合的旋翼无人机,由于加装了倾转机构,三个旋翼具备矢量推力功能,使得三旋翼无人机的稳定性,操纵性,抗扰动行及推进效率均得到了有效提升。
14、2、本实用新型为充分发挥四旋翼无人机稳定可靠高效的优势,同时解决无人机吊运如长杆等特殊形状载荷时,载荷形态不受控的问题。
15、3、本实用新型在四旋翼构型的无人机的动力系统中应用无斜盘装置技术,使得单个动力系统亦具备产生控制力矩的能力。基于此,将标准四旋翼构型分割为两个双旋翼的组合,由于在动力系统上应用了无斜盘技术,双旋翼拥有了完整的独立飞行控制能力,在每个双旋翼中心安装飞行控制器,两个飞行控制器通过蓝牙连接建立无线传输数据链路,同时在机架上应用电磁铁吸盘装置及吊运挂载点,使得双旋翼可以通过磁吸装置组合成一个完整的四旋翼,亦可分离成两个双旋翼,其分离体与组合体的总升力相同,载荷能力相同,但可通过分体的方式实现对特殊形状载荷空中形态控制,在穿越复杂地形时亦可通过分离体的配合变换形态以适应地形,亦可按照经典四旋翼方式吊运常规载荷。
16、4、本实用新型能适应多种载荷类型及环境地形的同时,其结构复杂度,质量等相对于同尺寸普通四旋翼无人机无明显增加。
技术特征:1.一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:包括一号机体(1)、二号机体(2)和电磁铁磁吸装置(5),一号机体(1)和二号机体(2)通过磁铁磁吸装置(5)垂直交叉对接组合而成,一号机体(1)上安装有一号控制器(3),二号机体(2)上安装有二号控制器(4),一号控制器(3)和二号控制器(4)通过蓝牙连接,一号机体(1)和二号机体(2)的中部均安装有吊运挂钩(6)和电池(10),两个吊运挂钩之间通过吊运缆绳(7)相连,吊运缆绳(7)上安装有载荷(8),电池(10)分别与对应的控制器和电磁铁磁吸装置(5)电连接,运挂钩(6)配合吊运缆绳(7)进行货物吊运。
2.根据权利要求1所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机体(1)包括一号机主体,一号机主体的两端安装有一号机体电机(101)、无斜盘装置(9)和叶片(102),一号机体电机(101)的转轴端通过无斜盘装置(9)与叶片(102)相连。
3.根据权利要求2所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述无斜盘装置(9)包括无斜盘装置主体(90)和无斜盘装置连接块(91),无斜盘装置连接块(91)对称的分布在无斜盘装置主体(90)的两端,无斜盘装置主体(90)呈“s”形结构,无斜盘装置主体(90)的两端设有无斜盘装置主体通孔(901),无斜盘装置主体(90)的底部向外凸出形成截面为矩形状的无斜盘装置主体连接块(902);无斜盘装置连接块(91)为折弯结构,无斜盘装置连接块(91)的两端分别设有无斜盘装置连接块第一凹槽(911)和无斜盘装置连接块第二凹槽(912),无斜盘装置连接块(91)的两端分别设有无斜盘装置连接块第一通孔(913)和无斜盘装置连接块第二通孔(914),无斜盘装置连接块第一通孔(913)贯穿无斜盘装置连接块第一凹槽(911),无斜盘装置连接块第二通孔(914)贯穿无斜盘装置连接块第二凹槽(912),无斜盘装置主体(90)的端部位于无斜盘装置连接块第一凹槽(911)内,并通过螺栓依次穿过无斜盘装置连接块第一通孔(913)和无斜盘装置主体通孔(901)进行固连,叶片(102)的端部位于无斜盘装置连接块第二凹槽(912)内,螺栓依次穿过无斜盘装置连接块第二通孔(914)和叶片(102)的端部,进而将无斜盘装置连接块(91)与叶片(102)固连。
4.根据权利要求2所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机体电机(101)的电机端与一号机主体固连,一号机体电机(101)的转轴端套设有电机连接块(103),电机连接块(103)为回转体结构,电机连接块(103)的截面为梯形状,电机连接块(103)的顶部与无斜盘装置主体连接块(902)通过螺栓固连,电机连接块(103)的中部与一号机体电机(101)的转轴端固连。
5.根据权利要求2所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机主体包括依次固连为一体结构的一号机主体连接板(104)、一号机主体固定杆(105)、一号机主体连接杆(106)和一号机主体支撑块(107),一号机主体连接板(104)的截面为“工”字形,一号机主体连接板的两边对称依次固连有一号机主体固定杆(105)和一号机主体连接杆(106),一号机主体支撑块(107)位于一号机主体连接杆(106)的底部,一号机体电机(101)位于一号机主体连接杆(106)的端部。
6.根据权利要求5所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机主体连接板(104)上安装有一号控制器(3)和电磁铁磁吸装置(5),电磁铁磁吸装置(5)为柱体状结构电磁铁,电磁铁磁吸装置(5)的顶部安装有电磁铁固定板,电磁铁磁吸装置(5)的数量为四个且呈“口”字形布置,一号控制器(3)位于四个电磁铁磁吸装置(5)之间,电磁铁固定板用于对一号控制器(3)进行限位,从而使得一号控制器(3)不会脱落。
7.根据权利要求5所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机主体固定杆(105)为长方体结构,一号机主体固定杆(105)的中间开设有一号机主体固定杆通孔(1051),电池(10)安装在一号机主体固定杆通孔(1051)内。
8.根据权利要求5所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机主体连接杆(106)的截面为三角形结构。
9.根据权利要求5所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述一号机主体支撑块(107)的截面为梯形结构。
10.根据权利要求1所述的一种用于多场景吊运的模块化组合的旋翼无人机,其特征在于:所述二号机体(2)的结构与一号机体(1)的结构相同。
技术总结本技术公开了一种用于多场景吊运的模块化组合的旋翼无人机,包括一号机体、二号机体和电磁铁磁吸装置,一号机体和二号机体通过磁铁磁吸装置垂直交叉对接组合而成,一号机体上安装有一号控制器,二号机体上安装有二号控制器,一号控制器和二号控制器通过蓝牙连接,一号机体和二号机体的中部均安装有吊运挂钩和电池,两个吊运挂钩之间通过吊运缆绳相连,吊运缆绳上安装有载荷,电池与对应的控制器和电磁铁磁吸装置电连接,运挂钩配合吊运缆绳进行货物吊运。技术研发人员:周博宇,王迩荃,蒋放非,孙锦扬,梁媛媛,祝洋受保护的技术使用者:西南交通大学技术研发日:20231007技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/221583.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
预处理空气单元的制作方法
下一篇
返回列表