一种高容差率的空间碎片捕获装置和方法
- 国知局
- 2024-08-01 05:52:50
本发明属于航天卫星,特别是空间抓捕,具体涉及一种高容差率的空间碎片捕获装置和方法。
背景技术:
1、随着空间技术的高速发展,空间环境愈发拥挤,其中,空间碎片对空间任务和相关航天器的运营构成了巨大的威胁,包括废弃的卫星、火箭残骸、碎片物体等。由于空间碎片往往无机动能力,在太空中高速无序移动,大大增加了航天器碰撞风险。此外,物体之间一旦发生碰撞,将产生更多的碎片,进一步加剧空间碎片问题,形成所谓的“碎片连锁反应”,大大阻碍了空间资源的可持续发展。同时,截止到2021年,编目在册“有迹可循”的空间碎片已超过2万个,而受观测手段限制尚不能跟踪到的更小的碎片预计过亿,并且仍在不断增加。
2、空间抓捕技术是一种用于捕获、控制和操作太空物体的技术,旨在解决上述问题,以确保太空环境的可持续性和安全性。目前已有的抓捕方式,从结构特点可分为刚性抓捕方式与柔性抓捕方式,其中刚性抓捕方式以刺爪机械臂、抱爪机械臂等为主,中国专利申请号202011270231.6公开的一种抓捕机构,其抓捕方式为刺爪机械臂,在捕获装置与空间碎片体靠近时,利用刺爪刺入空间碎片,实现捕获锁定,但其缺陷在于刺爪刺入过程会破坏空间碎片结构造成新的空间碎片。而对于采用抱爪形式机械臂的抓捕方式,其缺点在于其抓捕目标需为一固定大小的具有规则形状的物体,对于形状大小不确定的空间碎片,通用性较差,同时上述刚性抓捕方式对抓捕卫星姿态控制系统的精度有较高要求,容差率较低。而柔性抓捕方式主要包括半柔性捕获机构、利用绳网的空间碎片捕获方式等,中国专利申请号202123033525.x公开的一种抓捕机构,该机构利用多环并联闭链连杆实现了半柔性抱爪捕获方式,可抓捕的目标尺寸范围比常规抱爪更大,对目标形状的适用性更高,但该抓捕机构结构、传动机构较复杂,且在捕捉大体积目标时,难以控制发射重量。中国专利申请号201310503724.3公开的一种绳网抓捕机构,该机构为飞网捕获形式,利用点火器与起爆器等火工系统将绳网弹出,通过绳网边缘质量块带动绳网展开,实现捕捉;该抓捕机构由于绳网与抓捕卫星之间采用单根柔性绳连接,在绳网弹射展开过程中,火工系统产生的大量燃气可能会导致绳网弹出方向的改变,导致抓捕精度下降,同时火工系统的存在会大大降低结构的安全性与可靠性。中国专利申请号201910106194.6公开的一种绳网抓捕机构,该机构利用机械臂带动绳网收紧,完成捕获,相较与传统的飞网捕获形式,该结构展开率更高,捕获可靠性更高,但是其大量的机械臂结构也存在质量过大与收纳体积过大的缺陷,使其无法适用于大型的被捕获目标。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提出了一种高容差率的空间碎片捕获装置和方法,该装置集成度高,收纳体积小,可装载于不同规格的微小卫星上,捕获精度较高,且具有较高的捕获容差率,对被捕获目标有较高的通用性。
2、本发明所提供的技术方案是:
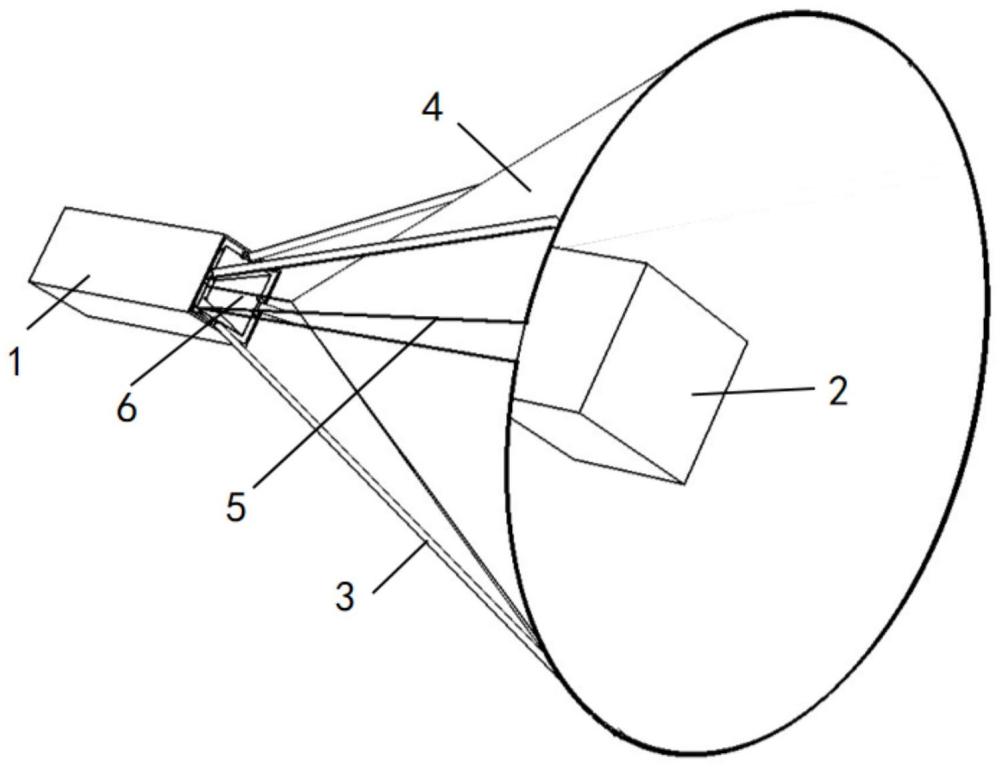
3、一种高容差率的空间碎片捕获装置,包括绳网、绳网储箱、绳网展开与收口系统、绳网回收系统;
4、所述绳网,用于包裹空间碎片;
5、所述绳网展开与收口系统,包括高收纳率可展开薄壁杆、齿轮传动系统、支撑杆展开系统、绳网收口绳;所述高收纳率可展开薄壁杆为一种具有双稳态特性的薄壁杆,即该薄壁杆既可以完全缠绕于转轴上保持稳定,也可以展开后具有一定刚度作为支撑杆提供稳定支撑;所述高收纳率可展开薄壁杆的底端收纳于所述支撑杆展开系统内部,所述高收纳率可展开薄壁杆的顶端与所述绳网开口端利用绑线固定连接,用于支撑所述绳网展开;所述齿轮传动系统设于所述捕获装置底层,用于为所述绳网展开与收口系统提供驱动力;所述支撑杆展开系统安装于所述齿轮传动系统上方,用于收纳和展开所述高收纳率可展开薄壁杆;所述绳网收口绳贯穿于所述绳网的开口端,收口绳的两个自由端与所述齿轮传动系统连接,用于在捕获空间碎片后对绳网进行收口;
6、所述绳网回收系统安装于所述支撑杆展开系统上方,用于在绳网收口以后对绳网进行牵引回收,避免空间碎片松动逃逸;
7、所述绳网储箱,用于储存未展开的绳网,为上底面开口的正四棱台结构,通过下底面固定安装于所述绳网回收系统外壳上;所述绳网储箱的下底面中心设有圆孔,所述绳网回收绳从该圆孔穿过;所述绳网储箱的上底面四条边的边缘靠外设有八个限位块,当所述捕获装置安装于卫星上时,八个限位块与卫星外壳的边缘围成四个限位孔,对从该限位孔穿过的所述高收纳率可展开薄壁杆起限位作用。
8、进一步的,所述齿轮传动系统,包括齿轮底板、传动轴齿轮、底层棘齿轮结构、上层棘齿轮结构、竖向减速电机、竖向减速电机座与齿轮底板支撑柱;所述齿轮底板为正方形板,是整个捕获装置的底板,一方面,整个捕获装置通过所述齿轮底板固定安装于卫星上,另一方面所述传动轴齿轮、底层棘齿轮结构、齿轮底板支撑柱装配在所述底板上;所述底层棘齿轮结构的内转盘为棘轮机构,外转盘为齿轮,当底层棘齿轮结构内转盘逆时针转动时能够驱动外转盘同步转动;所述底层棘齿轮机构转动安装于齿轮底板中心,四个传动轴齿轮转动安装于齿轮底板的四角,且所述底层棘齿轮机构外转盘与所述传动轴齿轮啮合,当底层棘齿轮机构逆时针转动时,能够驱动四个传动轴齿轮顺时针转动;所述上层棘齿轮结构的内转盘为棘轮机构,外转盘为圆柱;所述绳网收口绳的两个自由端固定连接于所述上层棘齿轮结构外转盘上,当上层棘齿轮结构内转盘瞬时针转动时能够驱动外转盘同步转动,使得绳网收口绳缠绕在上层棘齿轮结构外转盘上从而达到收短绳网收口绳,进而实现绳网收口的目的;所述上层棘齿轮结构转动安装于所述底层棘齿轮结构的上方,且与所述底层棘齿轮结构同轴;所述竖向减速电机与所述底层棘齿轮结构、上层棘齿轮结构同轴配合安装,当竖向减速电机正转的时候,能够驱动底层棘齿轮结构逆时针转动,从而驱动传动轴齿轮顺时针转动,而上层棘齿轮结构不转;当竖向减速电机反转的时候,能够驱动上层棘齿轮结构顺时针转动,而底层棘齿轮结构及传动轴齿轮不转;所述竖向减速电机座用于将竖向减速电机固定安装于所述支撑杆展开系统底部;所述齿轮底板支撑柱固定安装于所述底板四条边边缘的中间位置,用于与所述支撑杆展开系统连接;所述齿轮底板支撑柱的高度高于所述底层棘齿轮结构、传动轴齿轮,确保所述底层棘齿轮结构、传动轴齿轮能够在各自位置上顺滑转动。
9、进一步的,所述支撑杆展开系统,包括转轴层底板、传动轴、锥齿轮组、转轴、转轴层支撑柱、转轴层顶板;所述转轴层底板底部为尺寸与所述齿轮底板相同的正方形,中心设有尺寸与所述上层棘齿轮结构直径匹配的圆孔;所述转轴层底板通过所述齿轮底板支撑柱固定安装于所述齿轮传动系统上方;所述传动轴穿过所述转轴层底板与下方的传动轴齿轮配合;所述转轴层底板上面四角还设有l形安装板,四个l形安装板将所述转轴层底板上方划分成中间的十字形区域和四个角上的正方形区域;所述转轴有四个,分别转动安装于四个l形安装板之间,即位于十字形区域;所述转轴一侧设有突出端,该突出端穿过l形安装板与所述传动轴形成相交轴,交角为90°,位于四个角上的正方形区域内;所述锥齿轮组为四对规格相同的锥齿轮,锥齿轮分别安装于所述传动轴和所述转轴的突出端,锥齿轮相互啮合形成相交轴传动,实现由竖向减速电机驱动转轴转动;所述转轴的表面与所述高收纳率可展开薄壁杆的底端固定连接,高收纳率可展开薄壁杆卷绕收纳于所述转轴上,由转轴的转动完成展开;所述转轴层支撑柱固定安装于所述转轴层底板的四个角上,高度与所述l形安装板相同;所述转轴层顶板固定安装于所述转轴层支撑柱上,所述竖向减速电机通过竖向减速电机座固定安装于所述转轴层顶板下方;所述转轴层顶板为尺寸与所述转轴层底板底部尺寸相同的正方形,在该顶板的四个边上设有长方形豁口方便安装、检修转轴,靠近长方形豁口内侧设有长方形限位孔,对从限位孔穿过的所述高收纳率可展开薄壁杆起限位作用。
10、进一步的,所述绳网回收系统包括横向电机座、横向减速电机、回收绞盘、绳网回收绳、绳网回收系统外壳;所述横向电机座用于将所述横向减速电机固定安装于所述转轴层顶板上方,电机轴朝上,与所述回收绞盘配合安装;所述绳网回收绳一端绑系于所述绳网根部,另一端固定连接于回收绞盘上,用于抓捕成功后绳网的回收;所述绳网回收系统外壳为正方形,固定安装于所述转轴层顶板上的中心位置,尺寸小于所述转轴层顶板上中心未开孔区域,确保安装后该外壳能围住所述横向减速电机、电机座和回收绞盘,但不遮挡所述转轴层顶板上的长方形限位孔;所述绳网回收系统外壳的作用是限制回收后绳网的位置。
11、进一步的,所述高收纳率可展开薄壁杆为反对称铺层的复合材料柱壳,或复合材料/金属材料人字形杆,或豆荚杆。
12、进一步的,所述绳网并非常规意义上的由某种材料编织而成的网状结构,任何可满足以下条件的结构,均可为本发明所涉及的绳网:1.对空间碎片有较高的包裹性;2.柔性结构,有较高收纳率。
13、进一步的,所述上层棘齿轮结构与绳网收口绳的连接方式为胶接,或直接绑于上层棘齿轮结构表面。
14、进一步的,所述回收绞盘与绳网回收绳的连接方式为胶接,或直接绑于回收绞盘上面。
15、利用所述一种高容差率的空间碎片捕获装置对空间碎片的捕获方法,包括如下步骤:
16、步骤1:在接到捕获指令后,捕获装置的绳网展开与收口系统中的竖向减速电机正向转动,驱动底层棘齿轮结构逆时针转动,进而通过传动轴齿轮、传动轴、锥齿轮驱动转轴转动,卷绕在转轴上的高收纳率可展开薄壁杆在转轴的带动下向外伸出,进而带动绳网从绳网储箱中向外运动,同时牵引绳网收口绳与绳网回收绳伸出,实现绳网的展开,当绳网完全展开时,绳网在薄壁结构杆支撑下呈喇叭形,此时由卫星作控系统实现捕获装置的定位,将空间碎片置于绳网内部;
17、步骤2:捕获装置的绳网展开与收口系统的竖向减速电机反向转动,驱动上层棘齿轮结构顺时针转动,进而卷绕绳网收口绳,绳网收口绳被拉紧,实现绳网“布口袋”形式的收口,薄壁支撑杆在绳网收口绳的拉力作用下发生弯曲,屈曲段出现于与被捕获碎片接触处,至绳网收口结束,空间碎片被完全包裹于绳网中;
18、步骤3:捕获装置的绳网回收系统中的横向减速电机开始工作,驱动回收绞盘转动,进而卷绕绳网回收绳,绳网回收绳被拉紧,实现绳网的回收,将空间碎片拉向卫星,同时依靠高收纳率可展开薄壁杆根部未屈曲段的支撑刚度限制空间碎片的位置实现捕捉锁定,避免空间碎片松动逃逸,完成碎片捕获。
19、本发明的优点在于:
20、相比于常规的刚性机械臂捕获装置,该捕获装置通过采用可卷绕收纳的高收纳率可展开薄壁杆,传动机构简单,质量轻,收纳状态体积小,模块化程度高,外形包络规则,可作为单独模块完全收纳于卫星内部;
21、相比于常见的飞网捕获系统,该捕获装置通过采用高收纳率可展开薄壁杆作为绳网支撑杆带动绳网展开,由于高收纳率可展开薄壁结构杆展开后具有良好的刚度,能够使绳网展开过程更加可控,该薄壁杆展开后良好的刚度使得展开后绳网与卫星可视为一个整体,进而使该捕获装置获得与卫星相同的作控精度,抓捕精度较高;
22、此外,相比于传统的捕获机构,该捕获装置开口面积可设置为空间碎片轴向投影面积数倍,对卫星的控制误差的容忍度更高,可以装载于低作控精度卫星上。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221865.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表