仿生蜻蜓扑翼飞行器
- 国知局
- 2024-08-01 05:53:34
本发明属于飞行器,具体涉及仿生蜻蜓扑翼飞行器。
背景技术:
1、扑翼飞行器是一种模仿蝙蝠、鸟类或者昆虫飞行姿态且基于仿生学设计的一种飞行器。其具备飞行效率高、隐蔽性好、机动性强、可灵活改变飞行状态等优点,与固定翼及旋翼飞行器这两种传统飞行方式相比其能够快速实现急转、俯冲等传统飞行方式很难实现的高难度动作,使其在狭小空间飞行时更具有优势。并且在低雷诺数条件下,扑翼飞行方式相比传统飞行方式能够获得更高效的气动效率和能量利用率,这也使得扑翼飞行器在军事及民用领域有着广阔的应用前景。
2、目前,仿生扑翼飞行器一般采用单曲柄双摇杆、曲柄滑块、曲柄滑槽、双曲柄双摇杆、空间曲柄连杆等典型机构作为其扑动机构一般只能实现单段式的上下扑动,并且大部分扑翼飞行器的扑翼在空间上自由度不高,这导致扑翼飞行器的气动性能不佳其扑翼所能提供升力不足。此外,扑翼飞行器的控制主要还依靠尾翼如:垂直尾翼、v型翼、仿鸟尾翼,且其尾翼的控制通常相对较差,反馈时间较长无法及时调整飞行器的飞行姿态。
技术实现思路
1、本发明的目的是为了解决目前大部分扑翼飞行器存在的飞行控制效果较差及因扑翼空间上自由度不高而导致的气动性能不佳的问题,基于蜻蜓飞行特性以及气动理论,而提供仿生蜻蜓扑翼飞行器。
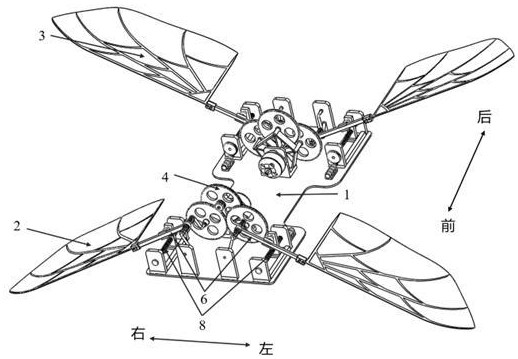
2、仿生蜻蜓扑翼飞行器,包括:底板支架1、2个前扑翼2、2个后扑翼3、前扑翼装置和后扑翼装置,所述的前扑翼装置和后扑翼装置结构相同,对称设置在底板支架1前后两端;
3、所述的前扑翼装置,包括:前主电机411、左前传动扑动机构60、右前传动扑动机构61、前转向机构8;前转向机构8包括:左前转向机构80和右前转向机构82,所述的左前转向机构80和右前转向机构82结构相同;
4、所述的左前传动扑动机构包括:左前输出齿轮615、左前可移动球头600、左前曲轴601、左前翼根连杆602、左前翼根转块603;
5、底板支架1设有曲轴架,左前曲轴601的两端与底板支架1的曲轴架轴接;左前输出齿轮615与左前曲轴601固定连接,左前可移动球头600固定于左前曲轴601的中间段,左前翼根连杆602的一端设有球头套,左前翼根连杆602球头套通过左前可移动球头600与左前曲轴601轴连接;左前翼根连杆602中部与左前翼根转块603滑动连接,另一端与前扑翼2相连;左前翼根转块603轴接于底板支架1上;
6、左前输出齿轮615、右前输出齿轮614相互啮合,前主电机411为其输入动力。
7、所述的左前转向机构80包括:左前转向电机802、左前螺纹转柱805、左前滑块806、左前线性导轨808、左前球头支座807;左前螺纹转柱805、左前滑块806、左前线性导轨808组成丝杠结构,左前球头支座807安装在左前滑块806上,左前球头支座807设有万向球,万向球与左前翼根转块603连接;
8、所述的左前电机支座801及左前线性导轨808固定连接于底板支架1上,所述左前螺纹转柱805两端轴接于底板支架对应支架上;左前螺纹转柱805、左前滑块806及左前线性导轨808组成丝杠结构,左前球头支座807安装在左前滑块806上,左前球头支座807设有万向球,万向球与左前翼根转块603的球头套连接;所述左前转向电机802安装于左前电机支架上,左前转向小齿轮803与左前转向电机802输出轴固定连接,左前转向大齿轮804与左前螺纹转柱805固定连接,左前转向小齿轮803与左前转向大齿轮804相互啮合。
9、所述的左前传动扑动机构设有左前弹性复位机构10,使左前翼根连杆602运动中限位、运动后复位;所述的右前传动扑动机构的右前弹性复位机构11与左前弹性复位机构10相同;
10、所述的左前弹性复位机构10的左前曲轴60的曲柄上设有弹簧ⅰ10a、弹簧ⅱ10b、可移动转片ⅰ10c、可移动转片ⅱ10d,所述可移动转片ⅰ10c及可移动转片ⅱ10d穿过左前曲轴601中间段轴接,固定于左前翼根连杆602球头套的两侧支架上,所述可移动转片ⅰ10c及可移动转片ⅱ10d中心孔径要大于左前曲轴601中间段直径,弹簧ⅰ10a穿过左前曲轴601中间段设于可移动转片ⅰ10c与左前曲轴601的前支撑台间,弹簧ⅱ10b弹簧穿过左前曲轴601中间段设于可移动转片ⅰ10d与左前曲轴601的后支撑台间;所述的弹簧ⅰ10a、弹簧ⅱ10b均处于压缩状态;
11、所述的前扑翼装置设有前减速传动机构4,它包括:前减速传动机构支架410、主电机小齿轮412、双层复合齿轮413,所述前减速传动支架410通过螺钉固定于底板支架1上,前主电机411通过螺钉固定于前减速传动支架410的后侧电机安装架上;
12、所述的左前输出齿轮615的轴心设有棱形开口,左前曲轴601设有与棱形开口相匹配的棱柱,左前曲轴601与右前曲轴611相同;右前输出齿轮614与左前输出齿轮615重合时,它们的棱形开口的边相互交叉,夹角等于齿轮上相邻两个齿的夹角的1/2;
13、所述的左前输出齿轮615及右前输出齿轮614相互啮合,固定于前减速传动支架410的前侧齿轮安装架上,其中右前输出齿轮614与双层复合齿轮413的小齿轮相互啮合;双层复合齿轮413的大齿轮与前主电机小齿轮412相互啮合,主电机小齿轮412与前主电机411轴固定连接;
14、所述的左前翼根连杆602球头套通过左前可移动球头600与左前曲轴601的中间段轴连接,左前可移动球头600与左前曲轴601之间为位置可变的固定连接。
15、本发明提供了仿生蜻蜓扑翼飞行器,属于飞行器技术领域,它包括:底板支架;前扑翼、后扑翼、前扑动装置、后扑动装置,其中:所述前、后扑动装置结构相同且对称布置于底板支架的前、后两端;所述扑动装置包括:电机、传动扑动机构及转向机构;所述传动扑动机构为空间曲柄转块机构;所述转向机构可控制扑翼进行变掠角运动。所述前、后传动扑动机构由两个电机分别控制可对前扑翼与后扑翼间的扑动相位差和扑动频率进行控制进而完成俯仰运动,通过控制前、后转向机构可使该飞行器完成偏航或快速急转运动,若前、后转向机构连续往复的运动可使前扑翼及后扑翼在空间上完成前后扫掠的上下扑动,对蜻蜓真实飞行情况进行较好的模拟,达到了仿生效果。
16、综上,本发明与现有技术相比,具有的有益效果及优点如下:
17、该扑翼飞行器对现实中蜻蜓翅膀的扑动频率以及多自由度的运动方式进行了模拟,是一种基于蜻蜓飞行特性以及气动理论提出的新型仿生蜻蜓扑翼飞行器。由于该扑翼飞行器前后传动机构的驱动源不同进而可实现对前后扑翼间的扑动相位差及扑动频率大小进行控制进而完成俯仰运动,前后转向机构可使该飞行器完成偏航或快速急转运动,若前后转向机构连续往复的运动可使前后扑翼在空间上完成前后扫掠的上下扑动且在扑翼运动过程中其可在一定范围内发生被动扭转,对蜻蜓真实飞行动作(俯仰、偏航、俯冲、急转等)较好的模拟,达到较好的仿生效果。
技术特征:1.仿生蜻蜓扑翼飞行器,包括:底板支架(1)、2个前扑翼(2)、2个后扑翼(3)、前扑翼装置和后扑翼装置,所述的前扑翼装置和后扑翼装置结构相同,对称设置在底板支架(1)前后两端;
2.根据权利要求1所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前转向机构(80)包括:左前转向电机(802)、左前螺纹转柱(805)、左前滑块(806)、左前线性导轨(808)、左前球头支座(807);左前螺纹转柱(805)、左前滑块(806)、左前线性导轨(808)组成丝杠结构,左前球头支座(807)安装在左前滑块(806)上,左前球头支座(807)设有万向球,万向球与左前翼根转块(603)连接。
3.根据权利要求2所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前电机支座801及左前线性导轨(808)固定连接于底板支架(1)上,万向球与左前翼根转块(603)的球头套连接;所述左前转向电机(802)安装于左前电机支架上,左前转向小齿轮(803)与左前转向电机(802)输出轴固定连接,左前转向大齿轮(804)与左前螺纹转柱(805)固定连接,左前转向小齿轮(803)与左前转向大齿轮(804)相互啮合。
4.根据权利要求1至3任一权利要求所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前传动扑动机构设有左前弹性复位机构(10),使左前翼根连杆(602)运动中限位、运动后复位;所述的右前传动扑动机构设有右前弹性复位机构(11),与左前弹性复位机构(10)相同。
5.根据权利要求4所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前弹性复位机构(10)的左前曲轴(60)的曲柄上设有弹簧ⅰ(10a)、弹簧ⅱ(10b)、可移动转片ⅰ(10c)、可移动转片ⅱ(10d)),所述可移动转片ⅰ(10c)及可移动转片ⅱ(10d)穿过左前曲轴(601)中间段轴接,固定于左前翼根连杆(602)球头套的两侧支架上,所述可移动转片ⅰ(10c)及可移动转片ⅱ(10d)中心孔径要大于左前曲轴(601)中间段直径,弹簧ⅰ(10a)穿过左前曲轴(601中间段设于可移动转片ⅰ(10c)与左前曲轴(601)的前支撑台间,弹簧ⅱ(10b)弹簧穿过左前曲轴(601)中间段设于可移动转片ⅰ(10d)与左前曲轴(601)的后支撑台间;所述的弹簧ⅰ(10a)、弹簧ⅱ(10b)均处于压缩状态。
6.根据权利要求5所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的前扑翼装置设有前减速传动机构(4),它包括:前减速传动机构支架(410)、主电机小齿轮(412)、双层复合齿轮(413),所述前减速传动支架(410)通过螺钉固定于底板支架(1)上,前主电机(411)通过螺钉固定于前减速传动支架(410)的后侧电机安装架上。
7.根据权利要求6所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前输出齿轮(615)的轴心设有棱形开口,左前曲轴(601)设有与棱形开口相匹配的棱柱,左前曲轴(601)与右前曲轴(611)相同;右前输出齿轮(614)与左前输出齿轮(615)重合时,它们的棱形开口的边相互交叉,夹角等于齿轮上相邻两个齿的夹角的1/2。
8.根据权利要求7所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前输出齿轮(615)和右前输出齿轮(614)固定于前减速传动支架(410)的前侧齿轮安装架上,其中右前输出齿轮(614)与双层复合齿轮(413)的小齿轮相互啮合;双层复合齿轮(413)的大齿轮与前主电机小齿轮(412)相互啮合,主电机小齿轮(412)与前主电机(411)轴固定连接。
9.根据权利要求8所述的仿生蜻蜓扑翼飞行器,其特征在于:所述的左前翼根连杆(602)球头套通过左前可移动球头(600)与左前曲轴(601)的中间段轴连接,左前可移动球头(600)与左前曲轴(601)之间为位置可变的固定连接。
技术总结本发明公开了仿生蜻蜓扑翼飞行器,属于飞行器技术领域,它包括:底板支架;前扑翼、后扑翼、前扑动装置、后扑动装置,其中:所述前、后扑动装置结构相同且对称布置于底板支架的前、后两端;所述扑动装置包括:电机、传动扑动机构及转向机构;所述传动扑动机构为空间曲柄转块机构;所述转向机构可控制扑翼进行变掠角运动。所述前、后传动扑动机构由两个电机分别控制可对前扑翼与后扑翼间的扑动相位差和扑动频率进行控制进而完成俯仰运动,通过控制前、后转向机构可使该飞行器完成偏航或快速急转运动,若前、后转向机构连续往复的运动可使前扑翼及后扑翼在空间上完成前后扫掠的上下扑动,对蜻蜓真实飞行情况进行较好的模拟,达到了仿生效果。技术研发人员:刘强,易继开,王翠,纪舰丰,于鑫,徐悦,周晓勤受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240722/221924.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表