一种流体推进爬杆机器人的制作方法
- 国知局
- 2024-08-01 05:58:14
本技术涉及爬杆机器人,具体而言,涉及一种流体推进爬杆机器人。
背景技术:
1、现有技术主动伸缩装置控制麻烦,且重量偏重,导致爬杆机器人控制困难,且重量较重因受主动伸缩装置行程限制,现有技术无法实现大范围变径或伸缩、扩展另外受驱动电机安装限制,当前机器人只能演一个方向,即平行杆件的方向行走,无法实现水平转动。
技术实现思路
1、为了解决上述问题,本实用新型的目的提出了一种流体推进爬杆机器人,所述流体推进爬杆机器人重量轻便,便于携带、运输,避开了主动伸缩机构的行程限制,可大范围变径的轻型爬杆机器人,机器人可通过流体推进器安装和主动转向,实现无需动力电机爬升,同时对于圆形杆件,可实现水平转动或螺旋上升。
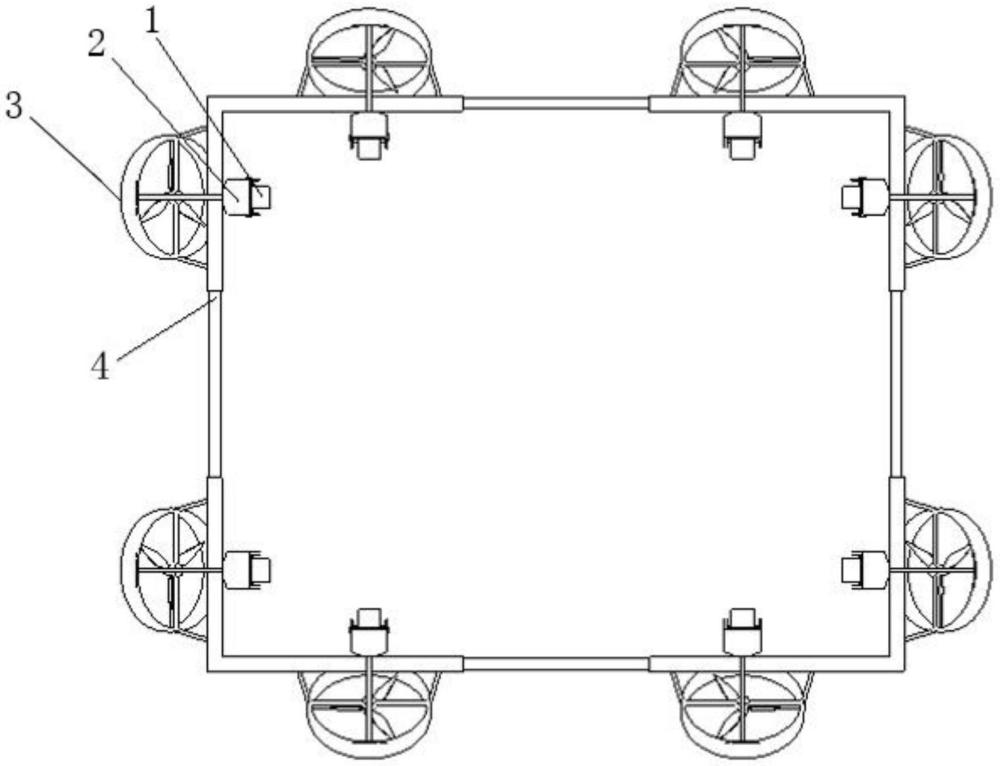
2、为了实现上述技术目的,本实用新型提供了一种流体推进爬杆机器人,包括:轮架、伸缩机构、滚轮、流体推进器;
3、所述轮架通过所述伸缩机构连接,所述轮架前面安装所述滚轮,所述轮架背面安装所述流体推进器,所述流体推进器与所述爬杆机器人前进方向倾斜一定角度安装。
4、优选地,所述伸缩机构为导轨。
5、优选地,所述轮架设置为若干个。
6、优选地,所述滚轮设置为全向轮或万向轮。
7、优选地,所述流体推进器两侧设置推杆电机,所述推杆电机用于推动所述流体推进器左右摆动,当所述流体推进器摆动方向一致时,所述推杆电机驱动所述爬杆机器人水平盘旋或螺旋上升。
8、优选地,所述的流体推进爬杆机器人还包括推进器支撑杆件,所述推进器支撑杆件用于支撑所述流体推进器。
9、与现有技术相比,本实用新型的有益效果为:
10、本实用新型提供的流体推进爬杆机器人重量轻便,便于携带、运输,避开了主动伸缩机构的行程限制,可大范围变径的轻型爬杆机器人,机器人可通过流体推进器安装和主动转向,实现无需动力电机爬升,同时对于圆形杆件,可实现水平转动或螺旋上升。
技术特征:1.一种流体推进爬杆机器人,其特征在于,包括:轮架、伸缩机构、滚轮、流体推进器;
2.根据权利要求1所述的流体推进爬杆机器人,其特征在于,所述伸缩机构为导轨。
3.根据权利要求1所述的流体推进爬杆机器人,其特征在于,所述轮架设置为若干个。
4.根据权利要求1所述的流体推进爬杆机器人,其特征在于,所述滚轮设置为全向轮或万向轮。
5.根据权利要求1所述的流体推进爬杆机器人,其特征在于,所述流体推进器两侧设置推杆电机,所述推杆电机用于推动所述流体推进器左右摆动,当所述流体推进器摆动方向一致时,所述推杆电机驱动所述爬杆机器人水平盘旋或螺旋上升。
6.根据权利要求1或5所述的流体推进爬杆机器人,其特征在于,所述的流体推进爬杆机器人还包括推进器支撑杆件,所述推进器支撑杆件用于支撑所述流体推进器。
技术总结本技术提供了一种流体推进爬杆机器人,涉及爬杆机器人技术领域,包括:轮架、伸缩机构、滚轮、流体推进器;所述轮架通过所述伸缩机构连接,所述轮架前面安装所述滚轮,所述轮架背面安装所述流体推进器,所述流体推进器与所述爬杆机器人前进方向倾斜一定角度安装。本技术提供的流体推进爬杆机器人重量轻便,便于携带、运输,避开了主动伸缩机构的行程限制,可大范围变径的轻型爬杆机器人,机器人可通过流体推进器安装和主动转向,实现无需动力电机爬升,同时对于圆形杆件,可实现水平转动或螺旋上升。技术研发人员:贾针,贾德增,师明月受保护的技术使用者:河南爬杆机器人有限公司技术研发日:20231102技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/222188.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表