一种基于双电机驱动的仿生蝴蝶扑翼飞行器
- 国知局
- 2024-08-01 06:20:49
本申请涉及飞行器,尤其涉及一种基于双电机驱动的仿生蝴蝶扑翼飞行器。
背景技术:
1、专利号为cn2022116815524的中国专利公开了一种多段式空间四边形机翼骨架及仿生飞行器,所述多段式空间四边形机翼骨架包括至少两段骨架节段,相邻骨架节段之间为可转动的连接,在相邻骨架节段之间还铰接有伸缩杆,在骨架节段中,与仿生飞行器的机身相连的为内段骨架,内段骨架上设置有驱动器;还涉及一种仿生飞行器,包括如上的多段式空间四边形机翼骨架,仿生飞行器还包括机身,机身上安装有驱动电机,驱动电机与多段式空间四边形机翼骨架之间为传动连接,驱动电机用于使多段式空间四边形机翼骨架扭转。
2、在该飞行器需要进行转向时,如在飞行器需要右转时,在使机翼扭转且飞行器处于平衡的前提下,通过将右侧机翼收拢,其中右侧机翼的收拢状态可处于未到达极点的状态,并将左侧机翼展开,使得右侧机翼上的对应中段骨架上的羽毛的上表面的弧度增大,如此,在飞行器飞行时,能使右侧机翼所获得的升力低于左侧机翼所获得的升力,使得左侧机翼被抬高,进而使得飞行器朝右侧倾斜,同时,在右侧机翼收拢时,其所对应的羽毛的上表面的弧度增大,使得在飞行器的前进方向上,其右侧机翼所受到的空气阻力增大,使得飞行器更易向右侧转向。
3、然而,发明人在构思及实现上述申请的过程中发现,上述公开的方案在实际使用过程中,仿生飞行器每次转向时,都需要其中一侧机翼扭转和收拢,并在该侧机翼收拢状态处于未到达极点的状态,另一侧机翼展开,由于实现一个转向功能需要多个动作的参与,因而需要控制两侧机翼的多个动作协调进行,当其中一个动作控制不精确时,会导致其他动作不协调,从而造成飞行器转向时的稳定性下降的问题发生。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种基于双电机驱动的仿生蝴蝶扑翼飞行器。
2、为实现上述目的,本申请是通过如下技术方案实现的:
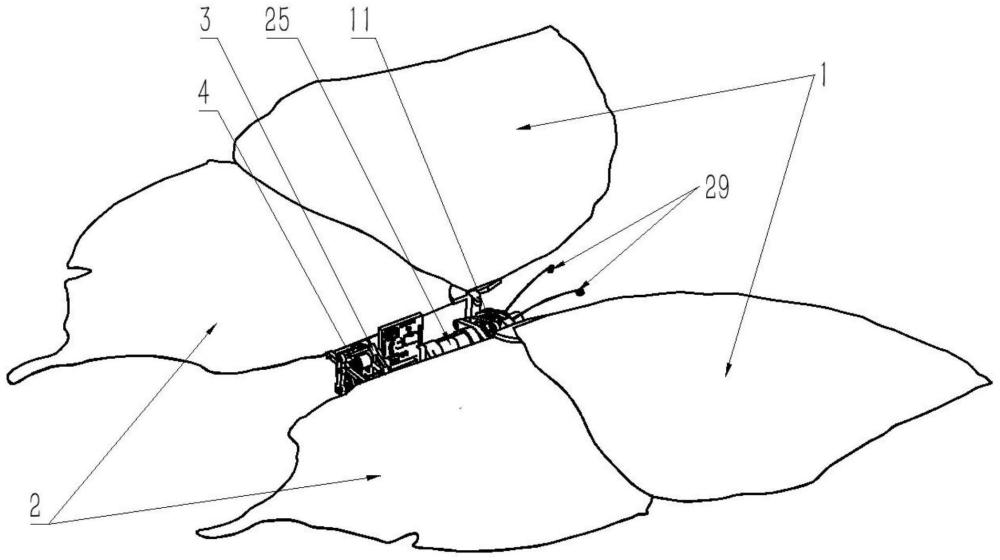
3、一种基于双电机驱动的仿生蝴蝶扑翼飞行器,包括一对前翼、一对后翼,以及设置于一对后翼之间的安装架,安装架的一侧设有转向机构,所述的转向机构包括:
4、固定于安装架末端的第一减速齿轮,第一减速齿轮的下方啮合有第二减速齿轮,第二减速齿轮的齿轮轴一端固定连接有第三齿轮,第三齿轮的上方啮合有第一扇形齿轮,第一扇形齿轮的齿轮轴固定连接有转向杆,转向杆与安装架之间设有复位弹簧,且转向杆与安装架分别连接后翼。
5、可选地,所述转向机构的前方设有扑翼机构,扑翼机构包括:
6、第一空心杯电机,其输出端固定连接有曲柄,曲柄的前侧设有具有腰型槽的导杆,曲柄的端部与所述腰型槽滑动连接,导杆的一端固定连接有第一摇臂,第一摇臂上设置有第二扇形齿轮,第二扇形齿轮啮合有第三扇形齿轮,第三扇形齿轮固定连接有第二摇臂。
7、可选地,所述第一空心杯电机与曲柄之间设有第一安装板,第一摇臂与第二摇臂的前端设有第二安装板,第一安装板与第二安装板之间穿设有转轴。
8、可选地,所述转轴设有两组,两组转轴的中部分别与第一摇臂、第二摇臂的底部固定连接。
9、可选地,所述第一摇臂的上端固定连接有第一翅根,第二摇臂的上端固定连接有第二翅根,第一翅根和第二翅根分别与前翼和后翼连接。
10、可选地,所述安装架和第一空心杯电机之间通过电池固定架固定有电池,电池与第一空心杯电机电性连接。
11、可选地,所述安装架的上部开设有通孔,所述通孔处安装有第二空心杯电机,第二空心杯电机与电池电性连接,第二空心杯电机的输出端固定连接第一减速齿轮。
12、可选地,所述电池的上端设有飞控板,飞控板分别与第一空心杯电机、第二空心杯电机和电池电性连接,飞控板上集成有电机控制模块、mpu6050模块、射频模块和图传模块。
13、可选地,所述第二安装板的前端面上设有摄像头和具有弹性的防撞触角,防撞触角的前端卷绕形成缓冲环。
14、可选地,所述第二安装板和电池固定架的底部设有具有弹性的弧形支撑杆,弧形支撑杆的尾部设有倒刺和倒钩。
15、本申请的有益效果:本申请只需控制第一减速齿轮顺时针或逆时针转动,即可实现飞行器右转或左转,且在第一减速齿轮停止转动时,飞行器能够恢复平衡,由于上述转向功能的实现只涉及第一减速齿轮的动作控制,而不涉及其他的动作控制,因而不会出现一个动作控制不精准导致的多个动作不协调的问题,因此能够保证飞行器转向时的平稳性。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种基于双电机驱动的仿生蝴蝶扑翼飞行器,包括一对前翼(1)、一对后翼(2),以及设置于一对后翼(2)之间的安装架(3),安装架(3)的一侧设有转向机构(4),其特征在于,所述的转向机构(4)包括:
2.如权利要求1所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述转向机构(4)的前方设有扑翼机构(11),扑翼机构(11)包括:
3.如权利要求2所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述第一空心杯电机(12)与曲柄(13)之间设有第一安装板(19),第一摇臂(15)与第二摇臂(18)的前端设有第二安装板(20),第一安装板(19)与第二安装板(20)之间穿设有转轴(21)。
4.如权利要求3所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述转轴(21)设有两组,两组转轴(21)的中部分别与第一摇臂(15)、第二摇臂(18)的底部固定连接。
5.如权利要求4所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述第一摇臂(15)的上端固定连接有第一翅根(22),第二摇臂(18)的上端固定连接有第二翅根(23),第一翅根(22)和第二翅根(23)分别与前翼(1)和后翼(2)连接。
6.如权利要求1所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述安装架(3)和第一空心杯电机(12)之间通过电池固定架(27)固定有电池(24),电池(24)与第一空心杯电机(12)电性连接。
7.如权利要求1所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述安装架(3)的上部开设有通孔,所述通孔处安装有第二空心杯电机(25),第二空心杯电机(25)与电池(24)电性连接,第二空心杯电机(25)的输出端固定连接第一减速齿轮(5)。
8.如权利要求6或7所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述电池(24)的上端设有飞控板(26),飞控板(26)分别与第一空心杯电机(12)、第二空心杯电机(25)和电池(24)电性连接,飞控板(26)上集成有电机控制模块、mpu6050模块、射频模块和图传模块。
9.如权利要求3所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述第二安装板(20)的前端面上设有摄像头(28)和具有弹性的防撞触角(29),防撞触角(29)的前端卷绕形成缓冲环。
10.如权利要求3所述的基于双电机驱动的仿生蝴蝶扑翼飞行器,其特征在于,所述第二安装板(20)和电池固定架(27)的底部设有具有弹性的弧形支撑杆(30),弧形支撑杆(30)的尾部设有倒刺(31)和倒钩(34)。
技术总结本申请涉及一种基于双电机驱动的仿生蝴蝶扑翼飞行器。该飞行器设有转向机构,转向机构包括固定于安装架末端的第一减速齿轮,第一减速齿轮的下方啮合有第二减速齿轮,第二减速齿轮的齿轮轴一端固定连接有第三齿轮,第三齿轮的上方啮合有第一扇形齿轮,第一扇形齿轮的齿轮轴固定连接有转向杆,转向杆与安装架之间设有复位弹簧,且转向杆与安装架分别连接后翼。本申请只需控制第一减速齿轮的动作,即可实现飞行器的转向,由于上述转向功能的实现只涉及第一减速齿轮的动作控制,而不涉及其他的动作控制,因而不会出现一个动作控制不精准导致的多个动作不协调的问题,因此能够保证飞行器转向时的平稳性。技术研发人员:孙军锋,李铖,危翊暄,陶子航,陈闽泽,金张颖,李相悦,王春杰,李楚豪受保护的技术使用者:昆明理工大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223424.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种复合结构球平衡飞行器
下一篇
返回列表