救生艇的制作方法
- 国知局
- 2024-08-01 06:47:03
本发明涉及救生艇。
背景技术:
1、救生艇有多种类型。他们用于救护生命。一些救生艇放置在船上,用于沉船时乘客和船员的自救;还有一些救生艇放置在陆地上,供rnli等组织的人员用来援助海上遇难者。
2、另一类救生艇被称为安全船或备用船,它们在海上或近海待命,以防发生事故。如果直升机要将人员运送到海上某个地方,例如海上风力涡轮机和油气平台,则需要使用安全艇。在工作站上安装此类安全船是很昂贵的。
3、众所周知,救生艇是从岸上工作站或离岸装置沿滑道下水的。在后一种入海方式中,艇员舱室位于波浪区上方,而救生艇位于同一高度。救生艇被释放后,自由落体式入海,潜到海面以下,再从平台上重新浮出海面。
4、上述救生艇在下水时需由工作人员操作。
技术实现思路
1、本发明的目的是提供一种改进的救生艇。
2、根据本发明的第一方面,提供了一种无人救生艇,包括:
3、艇上伤员舱室;
4、推进单元和转向器;
5、导航装置;
6、通信装置,具有待机模式,并用于接收激活信号和伤员位置;
7、控制器,与推进单元和所述转向器、导航装置以及通信装置可操作地连接,并用于:
8、当通信装置接收到所述激活信号时,激活推进单元和转向器;以及
9、在无艇上人员控制的情况下,与导航装置协作,以操控救生艇驶向伤员位置;以及
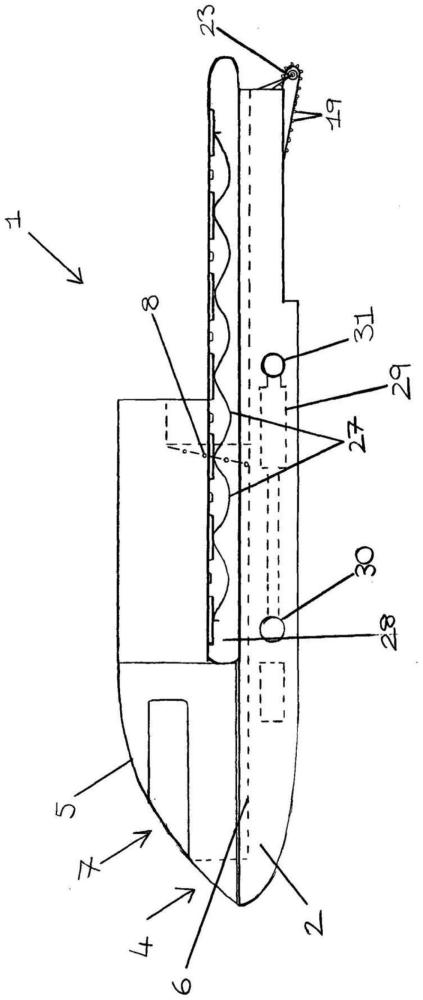
10、艇体的舷缘或艉横板的下端部,用于在无艇上人员帮助的情况下,伤员通过下端部登上救生艇或被搬运到救生艇上。
11、下端部可以设置在舷缘,具体地,以可打开的通口的形式。下端部也可以设置在艉横板,以更利于适航。具体地,下端部设置在艉横板中,或者下端部的部分设置在艉横板其余部分的前方。
12、可以理解的是,救生艇可设置为自动操作。可选或可替代地,救生艇也可设置为通过通信装置接收远程工作站传送给控制器的操控指令,根据操控指令工作。
13、可选地,控制器设置为以两阶段靠近方式控制推进单元,使得救生艇先相对快速地到达伤员附近再相对慢速地靠近伤员本身。可以理解的是,在预测的伤员位置的一定距离范围外,例如1/2公里外,救生艇可以全速行驶,例如航速20节到30节。然后,当进入一定距离范围内,但在一近距范围外,例如100m的距离外,救生艇将减速行驶,通常航速小于10节。最后,在该近距范围内,救生艇将以足够低的速度行驶,以保证伤员能够登艇。在此靠近阶段,预测的伤员位置为考虑到风或潮影响而进行校正后的航迹推算值,或者从伤员佩戴的个人定位标(plb,personal locator beacon)最新接收到的伤员位置,再或者从失事飞机配备的紧急无线电示位标(epirb,emergency position indicating radio beacon)最新接收到的伤员位置。可以在控制器中将伤员距离速度限制中设置为位置的外围,如由纬度和经度位置围成的圈,在圈内救生艇被限速。为此,导航装置可包括gps或等效仪器。
14、通常,伤员位置可通过无线电传输发送给救生艇,特别地,至少在开始时要传输坐标位置。但是,此传输可能为测向传输。因此,通过测向传输的初始位置可能被重定义,特别是伤员或伤员逃离的失事飞机的plb上具有epirb。无论是原始的、更新后的、还是通过航迹推测法校正后的坐标位置或定向航向,都可以用在开始的快速靠近阶段。
15、需注意的是,虽然伤员携带的epirb可传输gps位置,但是无线电传输的位置/方向不足以满足在最后的慢速靠近阶段的救援需求,因为不能精确地定位伤员所处的艉横板或舷缘的下端部。因此,救生艇还配备有检测海面上伤员的伤员检测装置,用于控制器在最后的慢速靠近阶段操控救生艇靠近伤员。
16、可以理解的是,虽然本发明中未说明,上述检测可以采用基于雷达或声纳的方式。然而,优选基于光学的方式,特别是基于相机的方式。为此,优选地,设置至少一个相机。该相机对可见光敏感,比如来自高能见度夹克或救生服的光,来自具有反光带或补丁的夹克或救生服光,或者来自应急灯的光,如频闪灯;或者,相机对红外光敏感,比如来自伤员面部和/或手部的红外光。
17、可选地,伤员检测装置包括至少双目相机。这些可能会被调整,以朝前缓慢地靠近,朝后最终靠近艇尾。一般地,将至少设置两对相机,其中一对朝艇首,一对朝艇尾。通过这些相机,控制器被编程以进行伤员识别和双目范围计算,从而操控救生艇缓慢靠近一个伤员或依序靠近各个伤员,其中,首先靠近的为迎风的伤员。
18、救生艇可配备照亮装置,用于将相机敏感光线照向伤员,以照亮伤员周围的水域,使得控制器能够接收到来自伤员的反射光。
19、通过使用救生艇来抵御风浪,可以最好地援救伤员。这包括在艇尾救援以及让救生艇迎着风浪前进。可选地,本发明的无人救生艇配备有风况和/或海况检测装置,具体地,为风速计和风向标。因此,控制器用于在救生艇的下风处有伤员时,使救生艇迎着风况和/或海况行驶,并操控救生艇的下端部朝向伤员。
20、与自动操控相反,在无线电控制的情况下,救生艇还包括传输装置,用于传输风况和/或海况数据和伤员图像给远程工作站,以将信号传输给控制装置从而操控救生艇驶向伤员。
21、在一个优选的实施例中:
22、下端部具有设置在艉横板的坡道,通过该坡道伤员可登上救生艇;
23、坡道具有动力传送机,用于将伤员搬运上救生艇;以及
24、坡道设置为:
25、其远端被降入水中以救援伤员;以及在
26、救援过程中,其远端从水中被抬起。
27、坡道还可以设置为延伸到艉横板外以及从艉横板中收回。
28、救生艇可设置为手动控制,使得幸存者登艇后能对其进行控制。
29、在一些实施例中,救生艇设置为自由落体发射。
30、通常,救生艇在使用前被安装在下水滑梯或滑道上。该滑梯或滑道和/或救生艇上设置有接收到激活信号时释放救生艇的装置。
31、具体地,救生艇被放置在诸如海上风力涡轮机或类似设施结构的下水滑道上,这样,工作人员对其进行维护通常需乘坐直升机。滑道和救生艇通常放置在波浪区上方。救生艇为自由落体发射,释放后先沉入海中然后再浮出海面,随后启动主发动机驶向幸存者的位置。
32、可以预见的是,自动/无线电控制救生艇的坡道设置在有人驾驶救生艇中时,也是具有益处的。
33、根据本发明的第二方面,提供了一种救生艇,包括:
34、艇体的舷缘或艉横板的下端部,伤员通过下端部能够登艇或被搬运上艇;以及
35、设置在下端部的坡道,伤员通过坡道能够登上救生艇。
36、优选地:
37、坡道具有动力传送机,用于将伤员搬运上所述救生艇;以及
38、坡道设置为:
39、坡道的远端降入水中和/或延伸过艉横板,以用于伤员救援;以及
40、在救援过程中,坡道的远端从水中抬起和/或从艉横板中收回。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225015.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种船舶仪表盘的制作方法
下一篇
返回列表