一种仿尺蠖多姿态运动的软体爬行机器人
- 国知局
- 2024-08-01 07:39:56
本发明属于机器人,涉及一种爬行机器人,尤其涉及一种仿尺蠖多姿态运动的软体爬行机器人。
背景技术:
1、在过去的几十年里,人类对机器人的研究更加的重视,并且希望机器人能够在更多领域代替人类,促进人类的发展,其应用范围已遍及日常生活、工业生产、科技研究和国防等多个领域。仿生科技在机器人行业有着较为多的应用,上有海鸥、蝙蝠,下有水母、章鱼,自然界的生物为技术发展提供了非常多的灵感,人类也更加重视起仿生科技的研究,发展极其迅速。相较于传统的仿生陆面机器人,例如仿生多足移动机器人、仿生蛇形机器人和仿生跳跃机器人等仿生陆面机器人来说,由于尺蠖是一种节肢动物,有着独特的柔性躯干,仿生尺蠖机器人也具有着更为灵活的运动方式的特点,在解决高空爬墙,爬墙越隙等越过一些较为复杂障碍的问题上发挥着独特作用。
2、但是现有的仿尺蠖软体爬行机器人爬行速度低、自由度少、爬行不够灵活,无法实现高空爬墙、爬墙越隙等一些较为复杂的越障功能。
技术实现思路
1、为解决上述背景技术中提及的问题,本发明的目的在于提供一种仿尺蠖多姿态运动的软体爬行机器人。
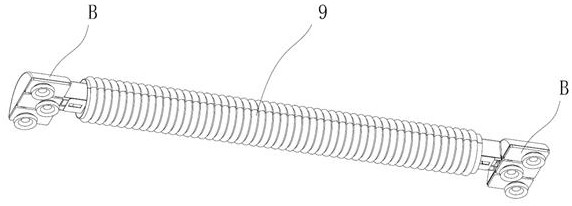
2、一种仿尺蠖多姿态运动的软体爬行机器人,包括软体控制机构和两个表面附着机构,所述的软体控制机构布置在两个表面附着机构之间,软体控制机构的长度延伸方向与两个表面附着机构连线的方向相同;
3、所述的软体控制机构包括若干节串联设置的控制单元,每节控制单元包括两个连接底座和n组周向均匀设置在两个连接底座之间的伸缩组件,通过每个伸缩组件的伸缩以及n组伸缩组件的联合作用实现长度的改变,进而实现每个控制单元长度的改变。
4、作为优选方案:每组伸缩组件包括一个小型单相气泵和一个两端封闭的橡胶波纹管一,所述橡胶波纹管一的两端分别固定连接在两个相邻的连接底座的相对面上,所述的小型单相气泵固定安装在连接底座上,并靠近橡胶波纹管一的端部,小型单相气泵与橡胶波纹管一之间通过气管一进行连通。
5、作为优选方案:每节控制单元还包括n根周向均匀设置的弹簧,所述的弹簧处于相邻的两组伸缩组件之间,每根弹簧的两端分别连接在相邻的两个连接底座上。
6、作为优选方案:所述的软体控制机构还包括一根中心弹性杆,所述的中心弹性杆同轴插装在若干个控制单元上,中心弹性杆的两端端部固定在软体控制机构处于两端的连接底座上。
7、作为优选方案:所述的软体控制机构至少为两个,在相邻的两个软体控制机构之间设置有一个转向弯曲关节;所述的转向弯曲关节包括中间连接杆、两个舵机、两个舵机支架和两个旋转云台一,两个所述的舵机、舵机支架和旋转云台一均对称布置在中间连接杆长度方向的两侧,所述舵机的外壳与中间连接杆的端部固定连接,舵机的舵盘与舵机支架的一端固定连接,舵机支架的另一端与旋转云台一的外壳固定连接。
8、作为优选方案:在软体控制机构和转向弯曲关节的外面套有一根橡胶波纹管二作为外壳。
9、作为优选方案:所述的表面附着机构包括至少一个吸附单元,每个吸附单元包括真空泵、气管二、吸盘底板和双层吸盘,所述的双层吸盘安装在吸盘底板朝向地面的一侧,双层吸盘与真空泵之间通过气管二进行连通。
10、作为优选方案:每个吸附单元还包括一个电磁阀,所述的电磁阀设置在气管二的管路上。
11、作为优选方案:所述的吸附单元为三个,三个吸附单元并排设置,且相邻的两个吸附单元之间通过销轴铰连接;所述的表面附着机构还包括一组驱动组件和两组角度调整组件,所述的驱动组件安装在中间吸盘底板上,两组角度调整组件分别安装在处于两侧的吸盘底板上,且以驱动组件为中心对称布置;
12、所述的驱动组件包括电机支架、步进电机和凸轮,所述的电机支架固定安装在吸盘底板上,所述的步进电机固定安装在电机支架上,步进电机的输出轴与凸轮固定连接;
13、所述的角度调整组件包括连接座、连杆、直线限位支座、推杆、弹簧和限位销;所述的连接座固定安装在所对应的吸盘底板上,且靠近中间的吸盘底板的位置处,所述的直线限位支座安装在中间吸盘底板上,且靠近侧面的吸盘底板的位置处;所述连杆的一端与连接座铰连接,连杆的另一端与推杆的一端铰连接,推杆插在直线限位支座中,推杆的另一端抵接在凸轮的外壁上;所述的限位销插装在推杆靠近凸轮的一端,弹簧套在推杆上,弹簧的一端抵接在直线限位支座,弹簧的另一端抵接在推杆端部的限位销上。
14、作为优选方案:所述的表面附着机构还包括一个l形支架、双轴舵机、舵机支架和旋转云台二,所述的双轴舵机安装在l形支架上,双轴舵机的舵盘通过舵机支架连接在中间的吸盘底板上,所述的旋转云台二安装在l形支架上,旋转云台二的轴线方向与双轴舵机的轴线方向垂直设置,旋转云台二的驱动端连接在软体控制机构的连接底座上。
15、与现有技术相比,本发明的有益效果为:
16、1、本技术中软体机器人的躯干部位采用的是软体控制机构和转向弯曲关节,软体控制机构利用气泵对橡胶波纹管的充气与放气实现长度的改变,而转向弯曲关节通过两个转动关节的弯曲实现长度的改变,从而软体机器人的躯干部位在软体控制机构和转向弯曲关节的联合作用下实现长度的改变,此长度的改变对软体机器人两端的表面附着机构产生驱动力,在两端的表面附着机构交替着地的方式下,使得软体机器人产生向前爬行的运动姿态,与尺蠖的爬行姿态类似,可以越过一些较为复杂的障碍。
17、2、本技术中的软体控制机构中设置有橡胶波纹管,由于橡胶波纹管是柔性的,不仅可以轴向伸长,还可以进行弯曲,故每个控制单元在自身以及其他控制单元的重力作用下,如果不受限制的话,会产生轴向形变以及径向形变,二者最终产生的效果就是弯曲形变,故会影响爬行机器人的爬行精度;由于弹簧在轴向上无论是拉伸还是压缩都会产生阻力,故多根弹簧的设计,可以在一定程度上减小控制单元由于重力作用而引起的轴向形变,且不会影响控制单元的主动伸缩或者弯曲;再根据连续性机器人的原理,利用弹簧的弹性,传递形变到下一个形变关节,从而整体达到想要的弯曲运动。而中心弹性杆由于是贯穿于各个连接底座的中心位置的,所以对连接底座会产生径向的限制,进而对安装在连接底座之间的控制单元产生径向限制作用,可以在一定程度上减小控制单元由于重力作用而引起的径向形变,且由于中心弹性杆具有弹性,可以实现弯曲/伸长/缩回,故不会影响控制单元的主动弯曲/伸缩。
18、3、本技术中的转向弯曲关节作为爬行机器人躯干的一部分,在两个转动关节的快速弯折下,可以辅助机器人的躯干部位进行速度较快的弯曲运动,能够有效提高机器人的移动速度,提高机器人的工作效率,同时在旋转云台的作用下可以实现软体爬行机器人转向。
19、4、本技术的表面附着机构采用三个吸附单元,通过增加吸附单元的个数,来增加表面附着机构与地面/墙面的吸附力,以起到更好的连接作用;同时相邻的两个吸附单元之间采用铰连接的方式进行连接,在驱动组件和两组角度调整组件的作用下,多个吸附单元之间的分布可以调整角度,有利于适应更多较为复杂的地形,例如表面凹凸不平的地面、墙壁,圆弧表面的树干、管道等。
20、5、本技术在吸附单元中设置电磁阀,电磁阀充当开关的作用,在进行吸附工作时,先使真空泵工作一会儿,使连接真空泵和双层吸盘的气管二中的气体全部抽出,然后打开电磁阀,以达到瞬间抽空双层吸盘内的空气,达到快速吸附的效果,提高吸附的工作效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228418.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表