一种用于翻越的摆臂及轮履切换机器人
- 国知局
- 2024-08-01 07:43:02
本发明属于机器人,涉及一种用于翻越的摆臂及轮履切换机器人。
背景技术:
1、轮履切换机器人在较为平坦的路面,会切换为轮模式,拥有着较快的移动速度,可以快速到达目的地完成任务。而在不平坦、崎岖或者泥泞的地面上移动时,轮履机器人会切换为履带模式,履带分布的载荷更大,有更好的牵引力,在农田、矿区、施工工地巡查移动中,对于不平坦、崎岖、湿滑的田地、不规则的地形和植物之间有着优势。它们可以穿越瓦砾、泥泞、高坡等困难地形,搜索幸存者或携带救援物资,可以进行侦察、物资运输、爆炸物拆除等任务,适用与战场、危险场景、恶劣的气候条件、人类难以到达的地区等,从而提高人员的安全性和生存率。轮履切换机器人在军事和反恐、矿区、农业、探索和救援等领域有着广泛的应用场景。
2、轮履切换机器人在应对复杂地形时的优势十分显著,然而,它们也存在一些限制和缺点,其中包括无法翻越较高障碍物和无法较高角度爬坡的问题。履带无法翻越较高障碍物:履带机器人的履带系统在提供稳定的牵引力和越野性能的同时,也限制了其能够翻越的障碍物的高度。因为履带的运动是一个相对平面的过程,较高的障碍物(如楼梯、大型障碍物)可能会阻碍机器人的通过,因为履带在短时间内无法产生足够的力来克服这些障碍物。履带机器人也无法较高角度爬坡,虽然履带机器人在崎岖的地形上表现出色,但是在爬升陡峭的斜坡时可能会受到限制。由于履带必须维持与地面的接触,过于陡峭的坡度会导致履带在其上失去足够的牵引力,从而无法继续前进,这限制了机器人在某些地形条件下的移动能力。
3、现有的轮履切换机器人在实现爬越障碍物通常需要履带车有着较长的履带,该履带车接触地面的履带长度值需比障碍物的高度值要大的多,再通过配合支撑摆臂抬高车辆,达到一定角度后再进行爬越障碍物。因此爬越障碍物的高度严格受到履带长度的限制,所以在纯履带车中,如爬楼梯情景下,通常需要较长的履带,跨越两个以上阶梯,从而无法做到小型化。而在轮履切换的移动机器人,由于该类机器人一般形态较小,导致履带车模式下的履带长度不够,也无法爬越较高的障碍物,且在遇到内嵌形状的障碍物,现有技术常常无法跨过易卡住,脱困能力不足;在遇到一些角度较大的斜坡,由于履带抓地力不足,也无法前进。
4、此外,有一些轮履机器人的支撑杆位于机器人尾端中间,无法360度旋转,仅用于爬越时向下扭转,提供额外扭矩和支撑力,爬越高度有限,爬越高度远小于摆臂长度。同时,由于撑杆只能较小角度旋转,导致撑杆撑开时,轮履机器人的重心始终无法位于整个整体的中心位置,若利用此类撑杆辅助翻越沟壑容易出现翻车情况。
技术实现思路
1、为解决上述技术问题,本发明提出一种用于翻越的摆臂及轮履切换机器人,能够使轮履切换机器人在较小接地履带长度的条件下爬越更高的障碍物,其摆臂还设计有绞牙,可以钩住固定物提供拉拽的力帮助爬越。轮履切换机器人的摆臂可360°旋转,配合摆臂的各种运动,适应更多场景,在某些特定的情形下,还可实现帮助脱困的功能。
2、本发明解决上述问题的技术方案是:一种用于翻越的摆臂,其特殊之处在于:
3、包括外挡板和内档板,外挡板和内档板配合连接,
4、外挡板和内档板的一端转动设置撑杆轴,撑杆轴中部设有铰链齿轮,撑杆轴的两端伸出外挡板和内档板,且两端分别设有撑杆轮,
5、外挡板和内档板的另一端转动设有铰链内齿轮,铰链齿轮和铰链内齿轮通过铰链连接,所述铰链上设有绞牙。
6、进一步地,上述撑杆轴通过轴承安装在外挡板和内档板上。
7、进一步地,上述外挡板上设有外挡板铰链内齿轮固定座,内档板上设有内挡板铰链内齿轮固定座,铰链内齿轮通过轴承安装在内挡板铰链内齿轮固定座和外挡板铰链内齿轮固定座上。
8、进一步地,上述撑杆轮的一侧设有撑杆轮固定轴,撑杆轮固定轴的端部设有和撑杆轴配合的凹槽,撑杆轴端部伸入撑杆轮固定轴的凹槽后通过螺钉进行固定。
9、进一步地,上述外挡板固定设有外挡板轴,外挡板轴穿过铰链内齿轮后伸出内档板。
10、进一步地,上述内档板上间隔设有内挡板紧固柱,内挡板紧固柱的端部设有螺孔,外挡板通过螺钉与内档板固定。
11、进一步地,上述绞牙的数量为两个,两个绞牙间隔设置。
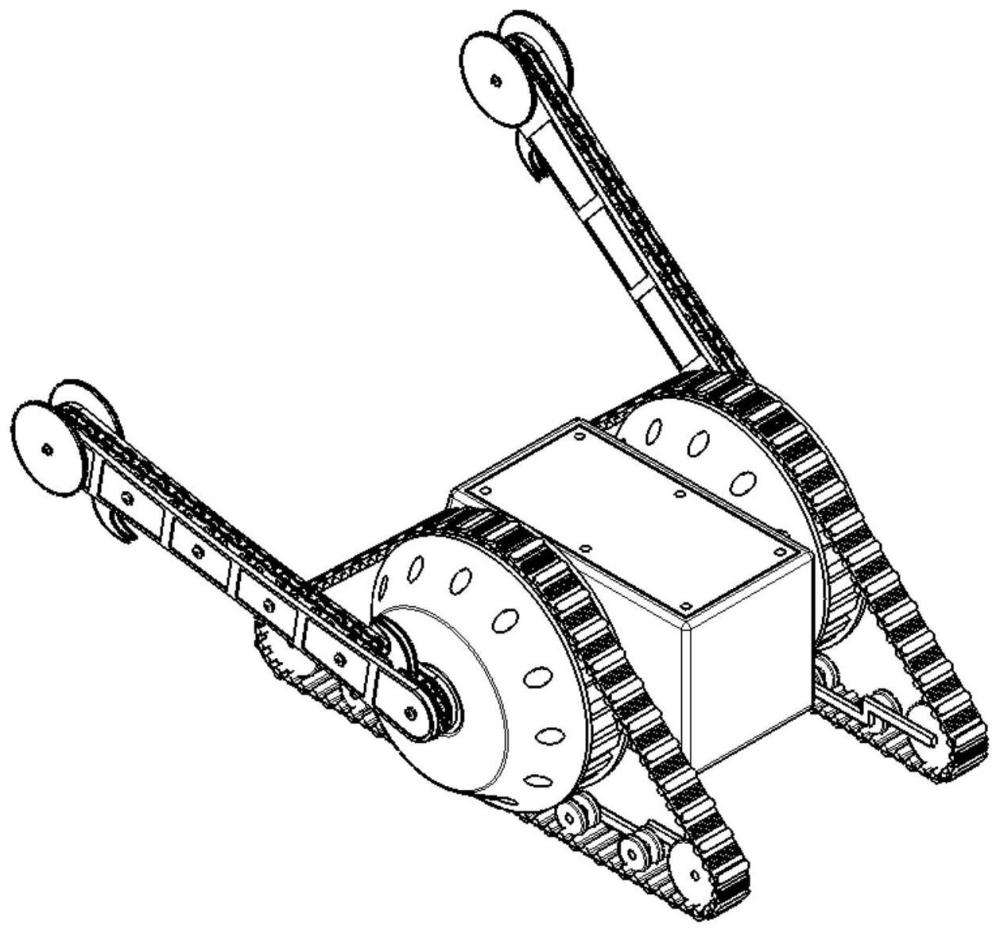
12、另外,本发明还提出一种轮履切换机器人,包括机器人主体,所述机器人的两侧的中部分别设有一个上述的用于翻越的摆臂,摆臂通过外挡板轴连接到机器人主体,
13、每一个摆臂通过两个电机驱动,其中一个电机带动外挡板轴转动,实现摆臂360°旋转,另一个电机连接直齿轮,直齿轮与铰链内齿轮啮合,带动铰链内齿轮转动,实现铰链、撑杆轮转动。
14、本发明还提出一种上述轮履切换机器人翻越沟壑的方法,其特殊之处在于,包括以下步骤:
15、步骤1:轮履切换机器人其一侧摆臂的撑杆轮与后面的平面接触;
16、步骤2:其另一侧的摆臂向前开始旋转,直到摆臂接触到沟壑对面的平面,可以通过电机的位置信息反馈,确认撑杆轮是否已经接触到对面平面;
17、步骤3:当确认接触到平面,轮履切换机器人通过车轮和撑杆轮1旋转,带动整个机器人前进,当机器人前进到沟壑上空,此时机器人主体悬空,车轮停止转动;
18、步骤4:撑杆轮继续旋转,带动轮履切换机器人前行,直到跨过沟壑。
19、本发明还提出另一种上述轮履切换机器人翻越大角度斜坡障碍物的方法,其特殊之处在于,包括以下步骤:
20、轮履切换机器人向前转动左右摆臂,同时转动铰链,使铰牙钩住障碍物,提供拖拽力,转动履带,实现轮履切换机器人翻越大角度斜坡障碍物。
21、本发明还提出另一种上述轮履切换机器人跨越台阶式障碍物的方法,其特殊之处在于,包括以下步骤:
22、步骤1:当轮履切换机器人接触到障碍物时,通过摆臂上摆测算障碍物的高度,摆臂抵住障碍物与地面,测算车与障碍物的距离,通过障碍物的高度和障碍物的距离判断是否能否翻越;
23、步骤2:若判断可以翻越,则轮履切换机器人移动至障碍物的最近距离,转动左右摆臂直至下部铰链接触障碍物,转动铰链使绞牙钩住障碍物实现拖拽,同时摆臂进行旋转拖拽与支撑;
24、步骤3:直至轮履切换机器人底部履带部分到合适位置,履带转动实现车辆前进;
25、步骤4:左右摆臂向后转动,对轮履切换机器人进行支撑;
26、步骤5:撑杆轮和履带转动,最终实现轮履切换机器人越过台阶障碍物。
27、本发明还提出另一种上述轮履切换机器人在高度不一致的狭窄路面的通行方法,机器人轮组两侧的地面高度不一致,若想使机器人保持平稳的通行,包括以下步骤:
28、步骤1:电机带动地面高度较低一侧的摆臂旋转,通过摆臂支撑起机器人达到相应的高度,使机器人保持基本水平,
29、步骤2:履带移动的同时,摆臂的撑杆轮转动,最终使得机器人能平稳行走。
30、本发明的优点:
31、1、本发明提供了一种用于翻越的摆臂,其包括铰链和撑杆轮,其铰链上设有铰牙,摆臂旋转,可用于对机器人进行支撑,铰链带动铰牙转动,可以实现对机器人进行拖拽。
32、2、本发明还提供了一种轮履切换机器人,其中部两侧分别设有一个用于翻越的摆臂,可以爬越大角度斜坡障碍物和台阶式较高障碍物,并且可以翻越沟壑,摆臂可360度旋转,利用foc电机可以精确提供各个方向角度的支撑力,摆臂上的绞牙,可以钩住固定物提供额外的拉拽力,灵活性大大增加,可适应更多场景,在某些特定的情形下,还可实现帮助脱困的功能。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228653.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。