电子助力转向系统和包括其的车辆的制作方法
- 国知局
- 2024-08-01 07:57:58
本申请涉及车辆的转向控制,尤其涉及一种电子助力转向系统和包括其的车辆。
背景技术:
1、随着汽车朝着电控化及智能化方向发展,自动驾驶的发展越来越快。高级别自动驾驶对功能安全性的要求也随之提高。汽车的转向系统作为自动驾驶的横向执行机构,需根据不同等级的自动驾驶标准适配相应的功能安全方案,避免车辆转向出现功能失效。
2、电子助力转向系统(eps,electronic power steering),是一种直接依靠电机提供辅助扭矩的动力转向系统。它在传统机械转向系统的基础上,根据方向盘上的转矩信号和汽车的行驶车速信号,利用电子控制装置使电动机产生相应大小和方向的辅助动力,从而协助驾驶员进行转向操作。电子助力转向系统以其轻量化、高效率、节能环保等优势,已经开始全面取代传统的液压助力转向系统,成为现代车辆的标配,是智能化汽车的重要组成部分,也是高阶辅助驾驶和自动驾驶不可或缺的部分。
3、对于l2级别自动驾驶(辅助驾驶,车辆能够完成部分驾驶任务,如自动加减速、自动转向等,但仍需驾驶员监控并随时准备接管),eps通常采用非冗余或局部冗余转向系统架构,当系统出现单点失效时,将失去转向功能。l3级以上自动驾驶,eps通常冗余架构,在出现单点失效时最少仍可提供50%转向助力,支持自动驾驶功能实现安全靠边停车。但是,当出现双点失效时,eps则无法提供足够的转向助力,车辆产生失控风险。
技术实现思路
1、本申请提供一种电子助力转向系统和包括其的车辆,可以在发生双点失效时提高转向系统的安全性。
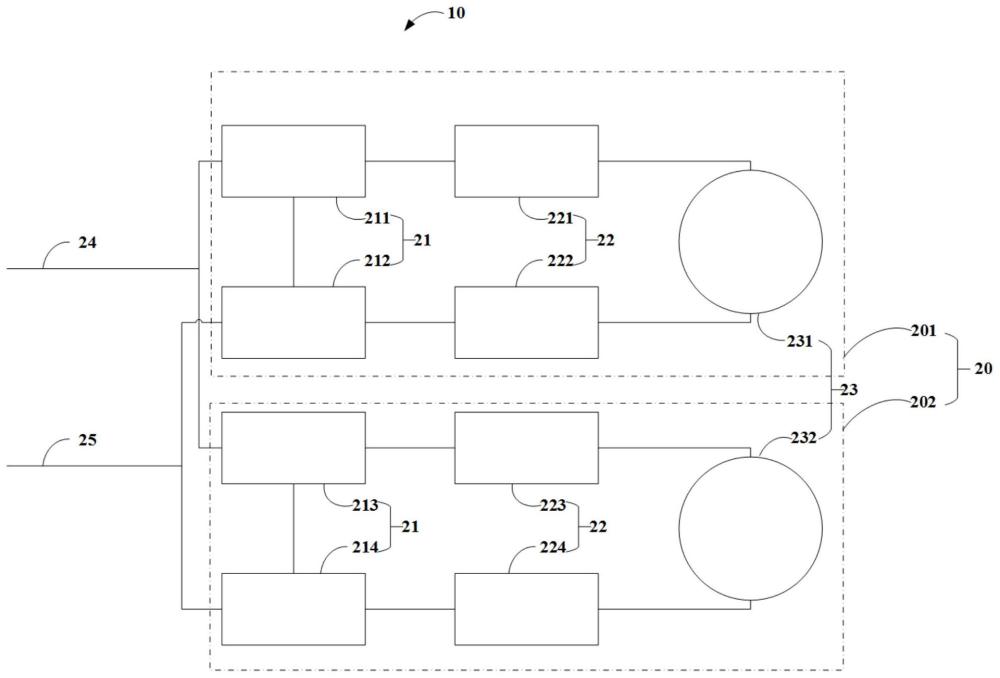
2、本申请提供一种电子助力转向系统,应用于车辆,包括n个子系统,n为大于等于2的正整数;每个所述子系统包括控制器、驱动电路和六相电机,所述控制器包括第一控制器和第二控制器,所述驱动电路包括第一驱动电路、第二驱动电路;所述第一控制器与所述第一驱动电路连接,所述第一驱动电路连接所述六相电机的三相绕组;所述第二控制器与所述第二驱动电路连接,所述第二驱动电路连接所述六相电机的其余三相绕组;所述第一控制器用于响应于转向请求信号,控制所述第一驱动电路驱动与其连接的三相绕组输出扭矩,所述第二控制器用于响应于所述转向请求信号,控制所述第二驱动电路驱动与其连接的三相绕组输出扭矩;
3、所述n个子系统的所述控制器两两连接;每个所述子系统包括第一通路和第二通路;所述第一通路包括所述第一控制器、所述第一驱动电路、所述六相电机的三相绕组;所述第二通路包括所述第二控制器、所述第二驱动电路、所述六相电机的其余三相绕组;
4、当所述n个子系统的m(1≤m<n)个通路发生故障时,未发生故障的所述通路的所述控制器用于:根据所述转向请求信号,控制与未发生故障的所述通路的所述控制器连接的所述六相电机的三相绕组输出扭矩。
5、可选的,所述第一控制器用于将所述转向请求信号发送给所述第二控制器。
6、可选的,所述第一控制器用于确定所述转向请求扭矩的1/n,且用于向所述第二控制器发送所述转向请求扭矩的1/2n;
7、所述第一控制器用于控制所述第一驱动电路驱动与其连接的三相绕组输出所述转向请求扭矩的1/2n;
8、所述第二控制器用于控制所述第二驱动电路驱动与其连接的三相绕组输出所述转向请求扭矩的1/2n。
9、可选的,
10、当所述n个子系统的m(1≤m<n)个通路发生故障时,未发生故障的所述通路的所述控制器用于:
11、确定所述转向请求扭矩的1/(2n-m)与所述六相电机的三相绕组能够输出的最大转向扭矩中的较小值;
12、控制与未发生故障的所述通路的所述控制器连接的所述六相电机的三相绕组输出所述较小值。
13、可选的,当任一所述子系统的两个所述通路发生故障时,未发生故障的所述子系统的所述第一控制器用于确定所述转向请求扭矩的1/(n-1),且用于向处于同一所述子系统的所述第二控制器传输所述转向请求扭矩的1/(2n-2)。
14、可选的,所述电子助力转向系统至少包括第一通信线路和第二通信线路,所述第一通信线路与所述n个子系统的所述第一控制器连接,用于向所述第一控制器传输所述转向请求信号;所述第二通信线路与所述n个子系统的所述第二控制器连接,用于向所述第二控制器传输所述转向请求信号。
15、可选的,当所述第一通信线路发生故障时,所述第二控制器用于通过所述第二通信线路接收所述转向请求信号,并向所述第一控制器发送所述转向请求信号。
16、可选的,每个所述子系统包括第一can收发器和第二can收发器;所述第一控制器通过所述第一can收发器连接所述第一通信线路;所述第二控制器通过所述第二can收发器连接所述第二通信线路。
17、可选的,每个所述子系统包括第一电源和第二电源;所述第一电源与所述第一控制器连接,用于为所述第一控制器供电;所述第二电源与所述第二控制器连接,用于为所述第二控制器供电。
18、本申请还提供一种车辆,包括整车控制器和如上述任一项所述的电子助力转向系统,所述电子助力转向系统与所述整车控制器通信连接,所述整车控制器用于向所述电子助力转向系统发送转向请求信号。
19、电子助力转向系统至少包括2个子系统,每个子系统包括控制器、驱动电路和六相电机,控制器包括第一控制器和第二控制器,驱动电路包括第一驱动电路、第二驱动电路;第一控制器与第一驱动电路连接,第一驱动电路连接六相电机的三相绕组;第二控制器与第二驱动电路连接,第二驱动电路连接六相电机的其余三相绕组;第一控制器用于响应于转向请求信号,控制第一驱动电路驱动与其连接的三相绕组输出扭矩,第二控制器用于响应于转向请求信号,控制第二驱动电路驱动与其连接的三相绕组输出扭矩;n个子系统的控制器两两连接;每个子系统包括第一通路和第二通路;第一通路包括第一控制器、第一驱动电路、六相电机的三相绕组;第二通路包括第二控制器、第二驱动电路、六相电机的其余三相绕组;当n个子系统的m(1≤m<n)个通路发生故障时,未发生故障的通路的控制器可以获取故障通路的信息,并且根据转向请求信号,控制与未发生故障的通路的控制器连接的六相电机的三相绕组输出扭矩。如此在电子助力转向系统发生双点失效故障时,例如同一子系统或不同子系统的两个控制器出现故障时,至少还有其余两个控制器可以正常工作,至少可以提供部分转向助力,可以保证车辆靠边停车,提高了车辆的行驶安全性,可以满足高级别自动驾驶的要求。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种电子助力转向系统,应用于车辆,其特征在于,包括n个子系统,n为大于等于2的正整数;每个所述子系统包括控制器、驱动电路和六相电机,所述控制器包括第一控制器和第二控制器,所述驱动电路包括第一驱动电路、第二驱动电路;所述第一控制器与所述第一驱动电路连接,所述第一驱动电路连接所述六相电机的三相绕组;所述第二控制器与所述第二驱动电路连接,所述第二驱动电路连接所述六相电机的其余三相绕组;所述第一控制器用于响应于转向请求信号,控制所述第一驱动电路驱动与其连接的三相绕组输出扭矩,所述第二控制器用于响应于所述转向请求信号,控制所述第二驱动电路驱动与其连接的三相绕组输出扭矩;所述n个子系统的所述控制器两两连接;每个所述子系统包括第一通路和第二通路;所述第一通路包括所述第一控制器、所述第一驱动电路、所述六相电机的三相绕组;所述第二通路包括所述第二控制器、所述第二驱动电路、所述六相电机的其余三相绕组;
2.根据权利要求1所述的电子助力转向系统,其特征在于,所述第一控制器用于将所述转向请求信号发送给所述第二控制器。
3.根据权利要求2所述的电子助力转向系统,其特征在于,所述第一控制器用于确定所述转向请求扭矩的1/n,且用于向所述第二控制器发送所述转向请求扭矩的1/2n;
4.根据权利要求1所述的电子助力转向系统,其特征在于,
5.根据权利要求1所述的电子助力转向系统,其特征在于,当任一所述子系统的两个所述通路发生故障时,未发生故障的所述子系统的所述第一控制器用于确定所述转向请求扭矩的1/(n-1),且用于向处于同一所述子系统的所述第二控制器发送所述转向请求扭矩的1/(2n-2)。
6.根据权利要求1所述的电子助力转向系统,其特征在于,至少包括第一通信线路和第二通信线路,所述第一通信线路与所述n个子系统的所述第一控制器连接,用于向所述第一控制器传输所述转向请求信号;所述第二通信线路与所述n个子系统的所述第二控制器连接,用于向所述第二控制器传输所述转向请求信号。
7.根据权利要求6所述的电子助力转向系统,其特征在于,当所述第一通信线路发生故障时,所述第二控制器用于通过所述第二通信线路接收所述转向请求信号,并向所述第一控制器发送所述转向请求信号。
8.根据权利要求6所述的电子助力转向系统,其特征在于,每个所述子系统包括第一can收发器和第二can收发器;所述第一控制器通过所述第一can收发器连接所述第一通信线路;所述第二控制器通过所述第二can收发器连接所述第二通信线路。
9.根据权利要求1所述的电子助力转向系统,其特征在于,每个所述子系统包括第一电源和第二电源;所述第一电源与所述第一控制器连接,用于为所述第一控制器供电;所述第二电源与所述第二控制器连接,用于为所述第二控制器供电。
10.一种车辆,其特征在于,包括整车控制器和如权利要求1-9任一项所述的电子助力转向系统,所述电子助力转向系统与所述整车控制器通信连接,所述整车控制器用于向所述电子助力转向系统发送转向请求信号。
技术总结本申请提供一种电子助力转向系统和包括其的车辆。电子助力转向系统包括N个子系统。每个子系统包括控制器、驱动电路和六相电机。控制器包括第一控制器和第二控制器。驱动电路包括第一驱动电路、第二驱动电路。第一控制器与第一驱动电路连接,第一驱动电路连接六相电机的三相绕组。第二控制器与第二驱动电路连接,第二驱动电路连接六相电机的其余三相绕组。第一控制器用于响应于转向请求信号,控制第一驱动电路驱动与其连接的三相绕组输出扭矩。第二控制器用于响应于转向请求信号,控制第二驱动电路驱动与其连接的三相绕组输出扭矩。N个子系统的控制器两两连接。每个子系统包括第一通路和第二通路。第一通路包括第一控制器、第一驱动电路、六相电机的三相绕组。第二通路包括第二控制器、第二驱动电路、六相电机的其余三相绕组。当N个子系统的M(1≤M<N)个通路发生故障时,未发生故障的通路的控制器用于:根据转向请求信号,控制与未发生故障的通路的控制器连接的六相电机的三相绕组输出扭矩。本申请可以提高安全性。技术研发人员:张飞翔,窦德海,汪帅丽,裴福兴,郁邦国,董涛涛,杨坤受保护的技术使用者:浙江吉利控股集团有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229679.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表