适用于吊装葫芦的手自一体扳手及吊装葫芦的制作方法
- 国知局
- 2024-08-01 04:25:58
本发明涉及一种吊装葫芦,尤其涉及了一种适用于吊装葫芦的手自一体扳手。
背景技术:
1、随着中国经济的飞速发展,国家不断加大基本建设的投入,特别是近几年对电力基础设施投资的迅猛发展,因而应用于各种基建场合的紧线器(吊装葫芦)市场将越来越广阔,需求将越来越大,国内市场前景非常好。
2、电力紧线提线都是在高空作业,环境比较特殊,工人在高空时与地面情况不同,重心不稳风险相对较大。在此恶劣环境中,传统的手动紧线器(葫芦)使用需要用人力去扳动扳手,使用不便效率也不高,且在作业时有一定安全风险。
3、手动、电动两用的紧线器(葫芦)一般在切换时需要增加单独的操作手柄,并且在操作切换时还需要使得增设的手柄匹配不同的传动机构,不仅操作、携带较为不便,而且还需要对葫芦内部结构之间的配合关系进行改变,难以很好的适用于高空作业。
技术实现思路
1、本发明针对现有技术中手动、电动两用的吊装葫芦存在的操作、携带不便的问题,提供了一种适用于吊装葫芦的手自一体扳手及吊装葫芦。
2、为了解决上述技术问题,本发明通过下述技术方案得以解决:
3、适用于吊装葫芦的手自一体扳手,包括安装在吊装葫芦上的驱动手柄,吊装葫芦包括起重链轮和用于驱动起重链轮转动的输入轴,起重链轮上通过链条设有下吊钩,驱动手柄能够在手动扳动作用下通过输入轴带动起重链轮转动以实现对下吊钩的升降,驱动手柄内还设有用于驱动输入轴转动的电动驱动机构。
4、作为优选,驱动手柄包括手柄杆体和垂直设置于手柄杆体一端的连接头,驱动手柄通过连接头转动连接在吊装葫芦上且连接头与输入轴同轴设置,电动驱动机构包括设置于手柄杆体内的驱动电机、与驱动电机连接的减速机以及通过减速机传动的驱动轴,驱动轴上设有用于对吊装葫芦传输动力的锥齿轮,输入轴上安装有与锥齿轮啮合的伞齿轮。
5、作为优选,伞齿轮上同轴安装有与伞齿轮周向限位且能够沿伞齿轮轴向运动连接轴,连接轴与连接头之间能够在连接轴的轴向运动作用下构成连接轴的周向限位。连接轴与伞齿轮周向限位,连接头与连接轴周向限位,继而能够实现转动连接头时伞齿轮跟随连接头一起转动,继而带动输入轴转动,最终实现对起重链轮的手动操作。
6、作为优选,连接轴的外侧壁上设有限位槽或限位块,连接头的远离机体的端面上设有与连接轴同轴设置的操作孔,操作孔内壁上设有与限位槽或限位块配合构成对连接轴周向限位的限位块或限位槽,连接轴轴向运动时能够使得限位块卡入或退出限位槽。通过限位槽与限位块的配合实现对连接轴与连接头之间的周向限位,继而实现转动连接头时伞齿轮不会相对连接头转动,继而实现手动扳动扳手来对输入轴进行操作。
7、作为优选,伞齿轮上同轴安装有与伞齿轮周向限位的连接轴,连接头的远离机体的端面上设有与连接轴同轴设置的操作孔,操作孔内能够伸入棘轮扳手,连接轴的朝向操作孔的端部构成供棘轮扳手操作的操作端。直接通过常规的棘轮扳手来对输入轴进行操作,简单方便。
8、作为优选,驱动电机为带有刹车系统的刹车电机,刹车系统能够在驱动电机断电情况下通过锥齿轮锁死伞齿轮。通过刹车电机直接实现对伞齿轮的锁定,实现断电情况下能够通过扳动手柄来进行手动操作。
9、吊装葫芦,包括机体,机体上安装有前述的适用于吊装葫芦的手自一体扳手。
10、作为优选,机体上安装有上吊钩和下吊钩,机体包括起重链轮,下吊钩通过链条连接在起重链轮上,机体还包括用于驱动起重链轮转动的传动机构,传动机构包括伸出机体外部的输出轴,起重链轮能够在输出轴的转动作用下转动,输入轴能够带动输出轴转动;驱动手柄连接在机体上且与输入轴连接;
11、传动机构包括设置于输出轴一端的输入齿轮组,输入齿轮组处连接有制动机构,制动机构包括同轴设置于输出轴上的制动座和设置于制动座处的棘轮,制动座的内侧面与输出轴的外侧面上设有相互配合的啮合齿;
12、输入齿轮组包括设置于输出轴上的大齿轮和安装在输入轴上且与大齿轮啮合的小齿轮,输入轴通过轴承安装在机体上,
13、棘轮与制动座和大齿轮之间均设有一摩擦片,机体上还设有与棘轮配合的棘爪。制动机构的设置能够实现对起重链轮的单向锁死,避免吊装过程中被吊物反向运动,保证吊装安全性。
14、作为优选,传动机构还包括设置于输出轴另一端部的输出齿轮组,起重链轮转动的套设在输出轴上,起重链轮通过输出齿轮组与输出轴连接。
15、作为优选,机体包括两块相对且平行设置的安装板,起重链轮两端分别穿过两安装板且通过轴承与两安装板连接,起重链轮位于两安装板之间的外侧面上设有用于安装链条的链条槽;两块安装板相背的外侧面上分别设有第一外罩和第二外罩,第一外罩罩设于输出齿轮组外部,第二外罩罩设于输入齿轮组与制动机构外部。第一外罩与第二外罩的设置能够对传动机构进行较佳的防护,同时为驱动手柄、齿圈等的安装提供了较好的安装位置。
16、本发明由于采用了以上技术方案,具有显著的技术效果:
17、本发明采用手自一体的驱动手柄来实现对吊装葫芦的操作,工作过程中无需携带多余操作手柄,并且通过同一传动部件来进行传动,无需改变葫芦内部传动件之间的配合关系,能够较为方便实现手动操作与自动操作的切换,充分满足高空作业需要。
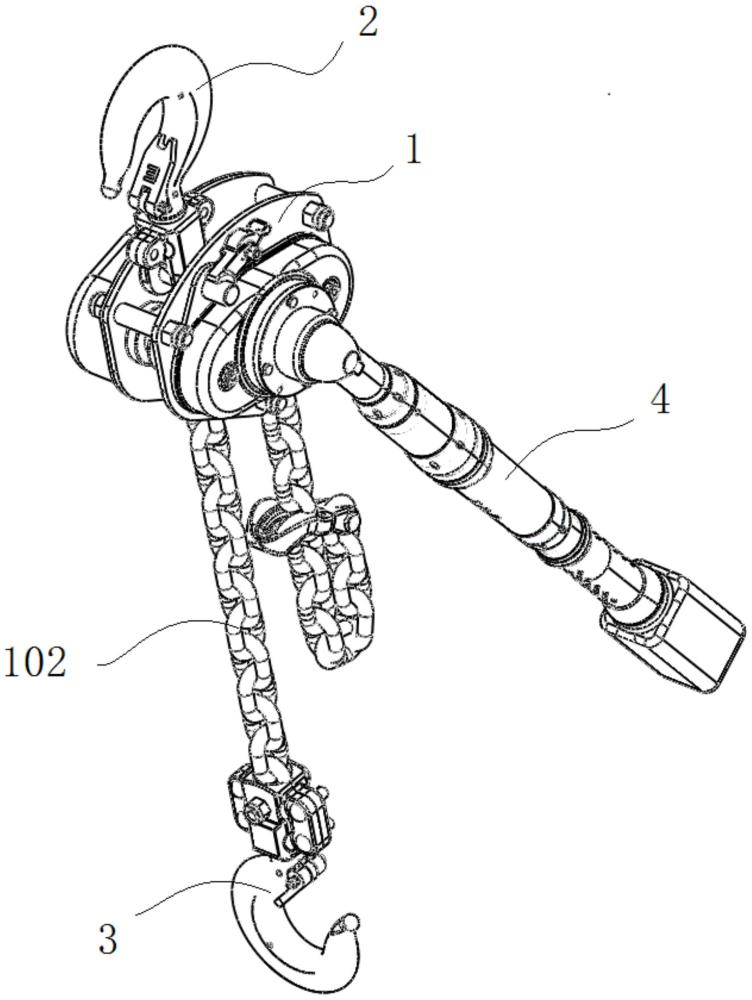
技术特征:1.适用于吊装葫芦的手自一体扳手,包括安装在吊装葫芦上的驱动手柄(4),吊装葫芦包括起重链轮(101)和用于驱动起重链轮(101)转动的输入轴(301),起重链轮(101)上通过链条(102)设有下吊钩(3),其特征在于:驱动手柄(4)能够在手动扳动作用下通过输入轴(301)带动起重链轮(101)转动以实现对下吊钩(3)的升降,驱动手柄(4)内还设有用于驱动输入轴(301)转动的电动驱动机构。
2.根据权利要求1所述的适用于吊装葫芦的手自一体扳手,其特征在于:驱动手柄(4)包括手柄杆体(401)和垂直设置于手柄杆体(401)一端的连接头(402),驱动手柄(4)通过连接头(402)转动连接在吊装葫芦上且连接头(402)与输入轴(301)同轴设置,电动驱动机构包括设置于手柄杆体(401)内的驱动电机、与驱动电机连接的减速机以及通过减速机传动的驱动轴,驱动轴上设有用于对吊装葫芦传输动力的锥齿轮(403),输入轴(301)上安装有与锥齿轮(403)啮合的伞齿轮(404)。
3.根据权利要求2所述的适用于吊装葫芦的手自一体扳手,其特征在于:伞齿轮(404)上同轴安装有与伞齿轮(404)周向限位且能够沿伞齿轮(404)轴向运动连接轴(405),连接轴(405)与连接头(402)之间能够在连接轴(405)的轴向运动作用下构成连接轴(405)的周向限位。
4.根据权利要求3所述的适用于吊装葫芦的手自一体扳手,其特征在于:连接轴(405)的外侧壁上设有限位槽或限位块,连接头(402)的远离机体(1)的端面上设有与连接轴(405)同轴设置的操作孔(406),操作孔(406)内壁上设有与限位槽或限位块配合构成对连接轴(405)周向限位的限位块或限位槽,连接轴(405)轴向运动时能够使得限位块卡入或退出限位槽。
5.根据权利要求2所述的适用于吊装葫芦的手自一体扳手,其特征在于:伞齿轮(404)上同轴安装有与伞齿轮(404)周向限位的连接轴(405),连接头(402)的远离机体(1)的端面上设有与连接轴(405)同轴设置的操作孔(406),操作孔(406)内能够伸入棘轮(109)扳手,连接轴(405)的朝向操作孔(406)的端部构成供棘轮(109)扳手操作的操作端。
6.根据权利要求2所述的适用于吊装葫芦的手自一体扳手,其特征在于:驱动电机为带有刹车系统的刹车电机,刹车系统能够在驱动电机断电情况下通过锥齿轮(403)锁死伞齿轮(404)。
7.吊装葫芦,包括机体,其特征在于:机体上安装有权利要求1-6任意一项所述的适用于吊装葫芦的手自一体扳手。
8.根据权利要求7所述的吊装葫芦,其特征在于:机体(1)上安装有上吊钩(2)和下吊钩(3),机体(1)包括起重链轮(101),下吊钩(3)通过链条(102)连接在起重链轮(101)上,机体(1)还包括用于驱动起重链轮(101)转动的传动机构,传动机构包括伸出机体(1)外部的输出轴(125),起重链轮(101)能够在输出轴(125)的转动作用下转动,输入轴(301)能够带动输出轴(125)转动;驱动手柄(4)连接在机体(1)上且与输入轴(301)连接;
9.根据权利要求8所述的吊装葫芦,其特征在于:传动机构还包括设置于输出轴(125)另一端部的输出齿轮组(103),起重链轮(101)转动的套设在输出轴(103)上,起重链轮(1101)通过输出齿轮组(103)与输出轴(103)连接。
10.根据权利要求9所述的吊装葫芦,其特征在于:机体(1)包括两块相对且平行设置的安装板(114),起重链轮(101)两端分别穿过两安装板(114)且通过轴承与两安装板(114)连接,起重链轮(101)位于两安装板(114)之间的外侧面上设有用于安装链条(102)的链条槽(115);两块安装板(114)相背的外侧面上分别设有第一外罩(117)和第二外罩(118),第一外罩(117)罩设于输出齿轮组(103)外部,第二外罩(118)罩设于输入齿轮组(104)与制动机构(105)外部。
技术总结本发明涉及一种吊装葫芦,公开了一种适用于吊装葫芦的手自一体扳手,包括安装在吊装葫芦上的驱动手柄,吊装葫芦包括起重链轮和用于驱动起重链轮转动的输入轴,起重链轮上通过链条设有下吊钩,驱动手柄能够在手动扳动作用下通过输入轴带动起重链轮转动以实现对下吊钩的升降,驱动手柄内还设有用于驱动输入轴转动的电动驱动机构。本发明采用手自一体的驱动手柄来实现对吊装葫芦的操作,工作过程中无需携带多余操作手柄,并且通过同一传动部件来进行传动,无需改变葫芦内部传动件之间的配合关系,能够较为方便实现手动操作与自动操作的切换,充分满足高空作业需要。技术研发人员:张文涛,李凯,刘云飞,钱阳天,崔宜科,王开库,余刚,余汉伟,李军,王彬彬,郑增晖受保护的技术使用者:安徽送变电工程有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240723/215804.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表